飞控定高定点设置教程
2026/4/15大约 3 分钟
我们这边需要说明一下:关于定高与定点的教程,我们仅提供基础思路与参考方向。如在实际使用过程中出现无法正常定高定点的问题,需由客户根据具体情况自行进行调参和优化。
在设置定高定点参数之前,请先将飞控刷写为最新版本的固件,并选择支持定高定点的协议。使用定高定点模式时,还需安装 GPS。
刷写过程可参考另一篇教程文章:
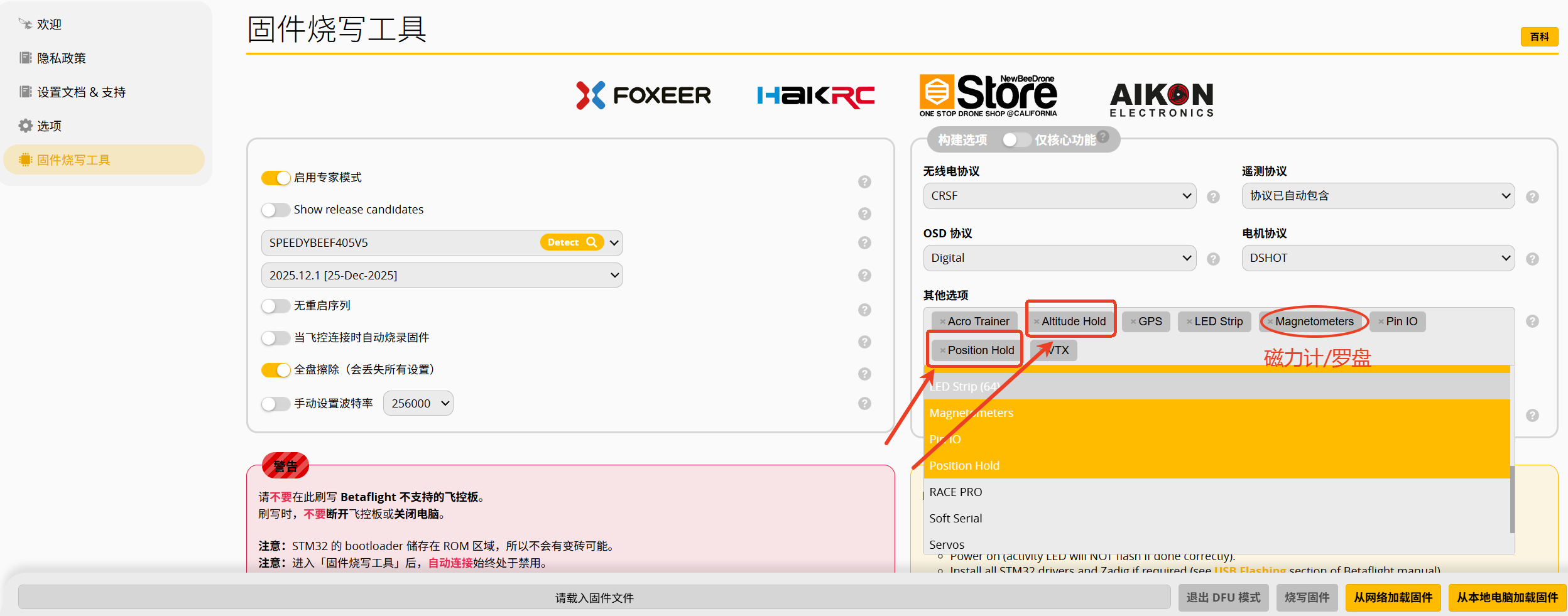
beatflight地面站刷写固件教程 :刷写时务必选择图片中显示的两个协议,否则将无法使用定高定点模式。(如果GPS带罗盘需要把“Magnetometers”协议选择上)
刷写最新固件配置文件(目前只有v5飞塔):
固件
配置文件:
Mario5-DC-202-(2025.12.1).txt(该配置仅为白色 Mario5 套机的默认配置,并未包含定高或定点功能的相关设置。如需实现定高、定点功能,仍需自行根据实际需求自行进行相应参数配置。)
第一步:模式设置
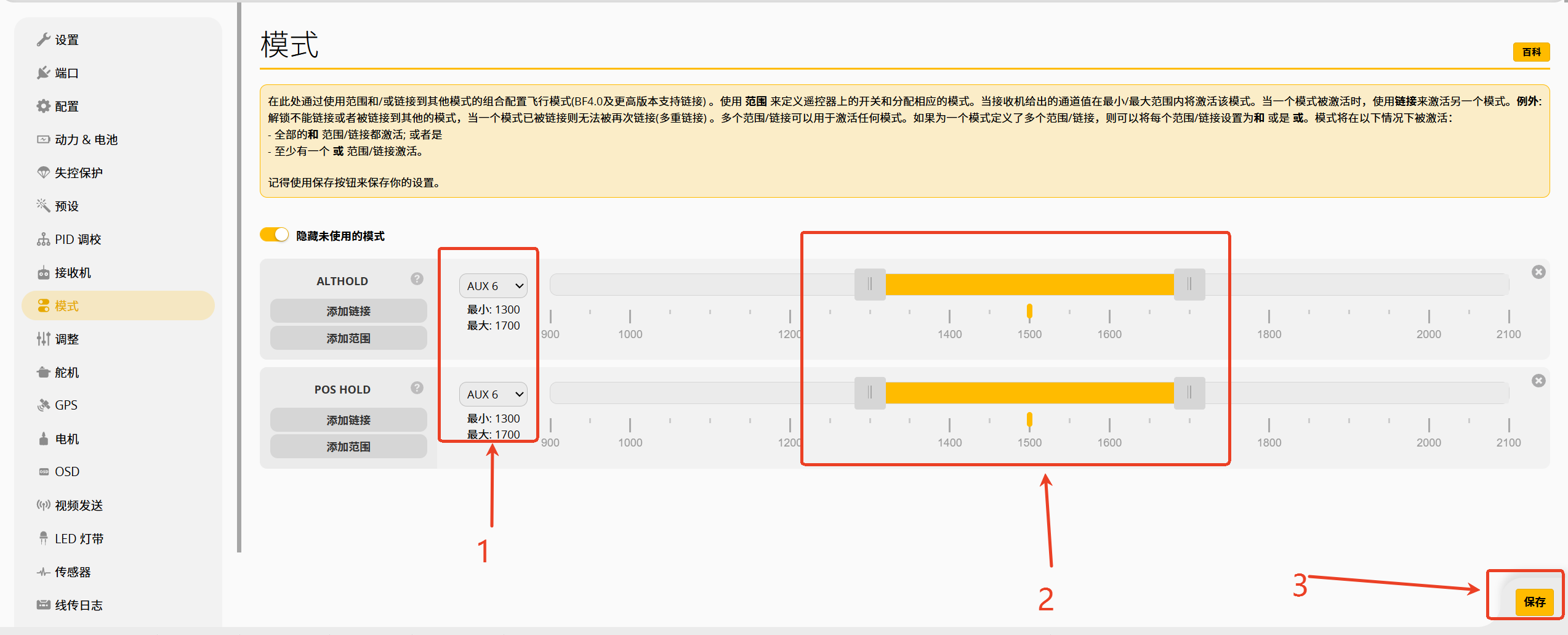
- 连接地面站,进入模式页面,选择“定高定点”模式。
- 确保两个模式使用同一通道(必须同时开启才能正常生效)。
- 设置好对应通道后,点击“保存”即可进行下一步。
第二步:起飞前注意事项
- 起飞前,请先开启 FPV 眼镜、遥控器和飞机。
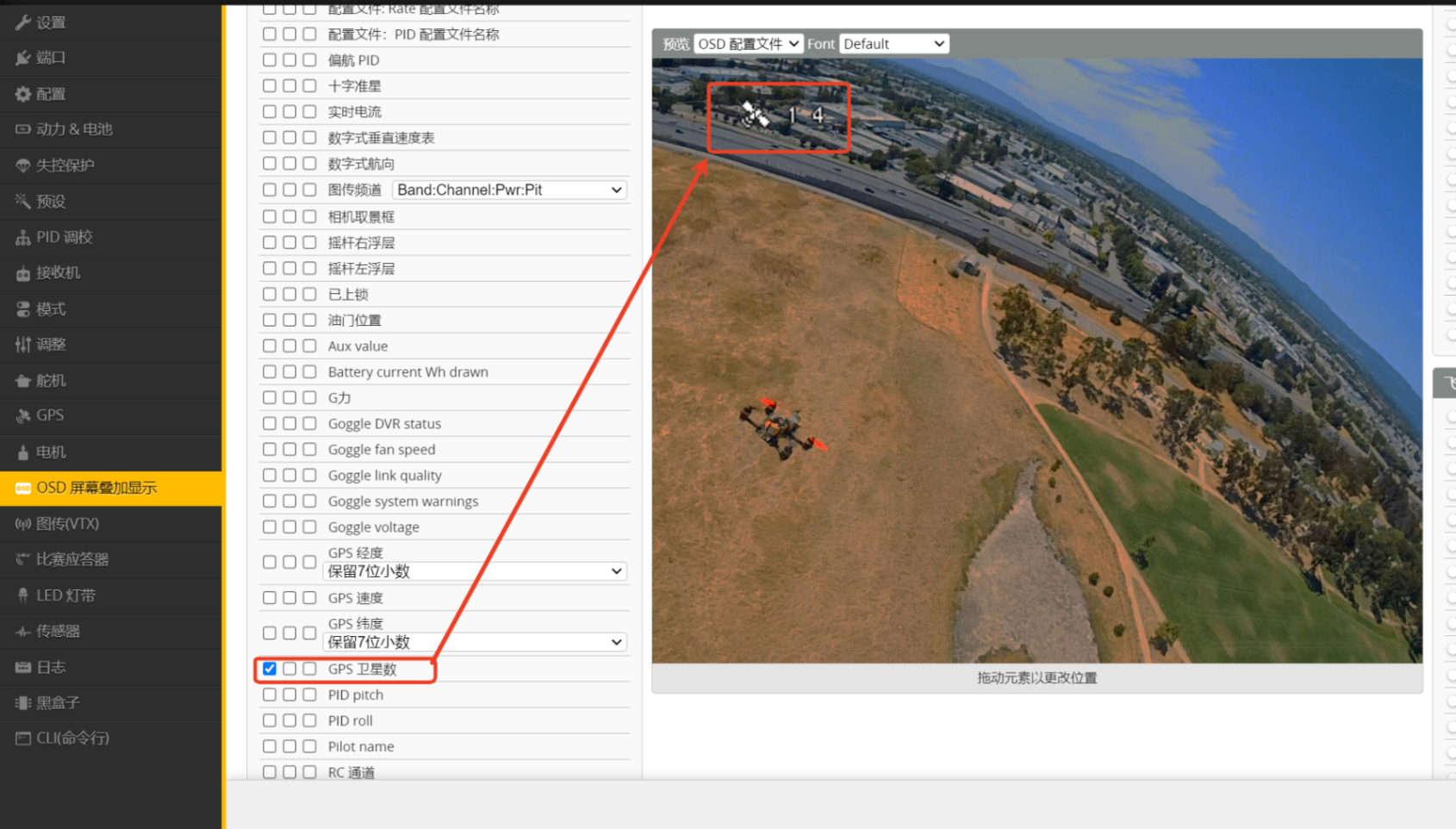
- 让飞机进入搜星状态。 注意:至少需获取 8 颗以上 GPS 卫星才能正常使用。卫星数量越多,定高定点模式越稳定。
第三步:定高定点操作步骤
- 建议先将飞机飞出约 50 米(此操作可帮助飞机准确识别家的方向,如果飞机没有确认“家”的方向,那么启用模式时会出现不稳定的情况)。
- 将飞机飞回目视范围内,拨动通道测试定高定点功能。
- 启动定高定点后,可适当增加一点油门,避免悬停油门过低导致下降;或者启动后将油门立刻拉到最低,让飞机立即悬停。
使用建议: 由于该模式是 Betaflight 新开发的功能,目前可能存在不稳定因素,例如容易受外部气流影响。建议仅将该功能作为娱乐用途进行体验,不宜在正式飞行或关键任务中使用。
第四步:如果定高定点出现问题的情况如下原因:
| 气压计现象 | 可能原因 | 解决方法 |
|---|---|---|
| 高度缓慢上下浮动 | 气流干扰气压计 | 加装黑色海绵 |
| 水平绕圈(马桶效应/刷锅) | 磁力计干扰或未校准GPS卫星数没有搜够8颗以上 | 重新校准,远离电流干扰源 |
| 定点时向一个方向飞走 | 磁力计朝向设置错误 | 修改 Mag Alignment (如 CW 270 Flip) |
| 高度突然暴冲或砸地 | 震动过大/悬停油门没有设置正确 | 检查动平衡,调整油门线性与悬停油门 |