飞控模式介绍
飞控的模式页面中有非常多的模式,
本篇教程会介绍常用的模式以及模式的使用方法
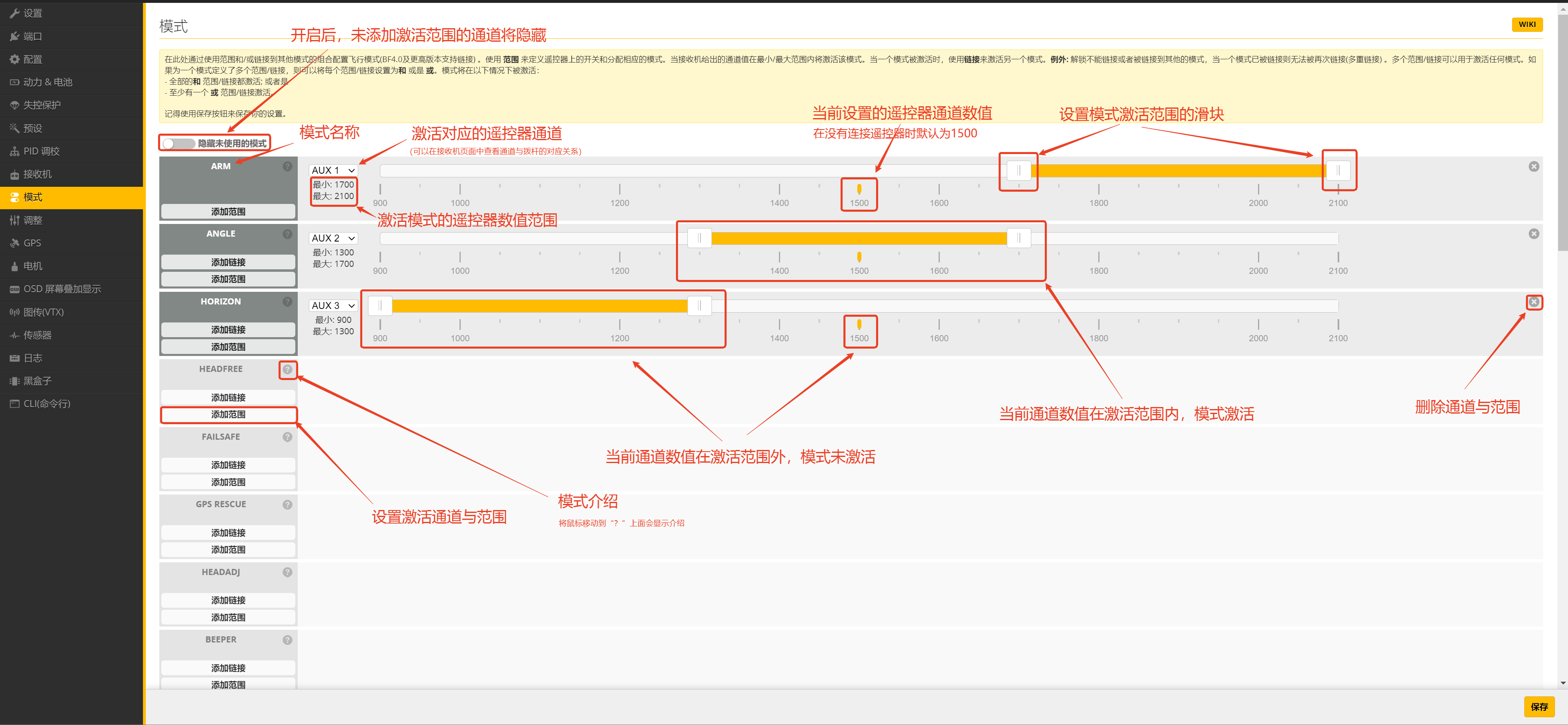
1.解锁通道
(1)ARM:解锁开关

激活该模式,飞机就可以开始飞行(电机开始旋转)
2.基础飞行模式
飞行模式会影响飞机的飞行方式,
同时只能启用一个飞行模式
(1)ARCO:手动模式
该模式没有对应的通道,在没有激活任何飞行模式时默认处于手动模式
手动模式:遥控器摇杆映射的是飞机的倾斜速度,打杆的幅度越大,飞机的倾斜速度就越大,摇杆归中时,飞行器不会回到水平状态
(2)ANGLE:自稳模式
激活该模式,飞机就会进入自稳模式

自稳模式:遥控器摇杆映射的是飞机的倾斜角度,打杆的幅度越大,飞机的倾斜角度就越大;摇杆归中时,飞行器也会回到水平状态
(3)HORIZON:半自稳模式
激活该模式,飞机就会进入半自稳模式

半自稳模式:遥控器摇杆映射的是飞机的倾斜速度,打杆的幅度越大,飞机的倾斜速度就越大;摇杆归中时,飞行器会回到水平状态
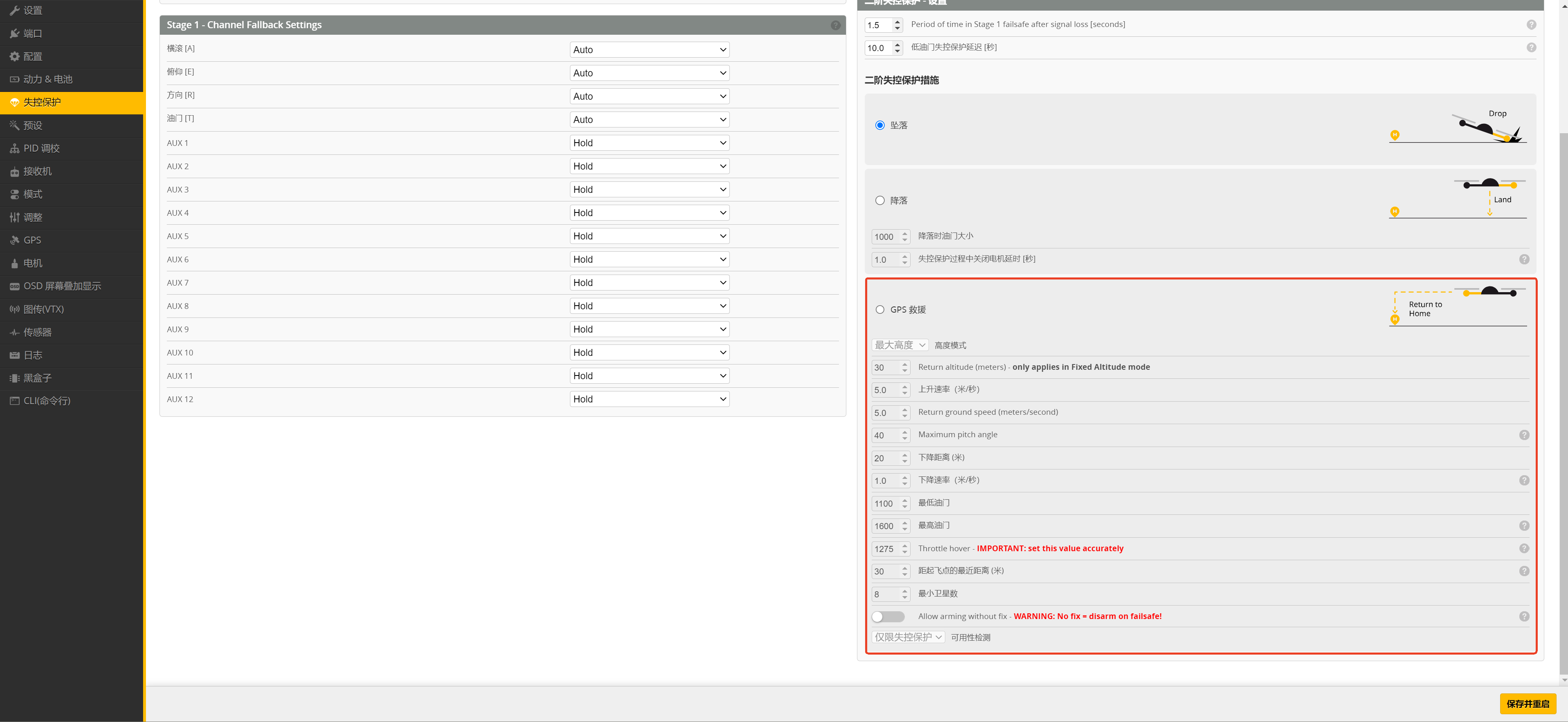
(4)FAILSAFE: 模拟失控保护
激活该模式,飞机就会自动进入“失控保护”状态

失控保护状态下,飞机具体的行为由“失控保护”页面的设置决定,具体信息可以参考:这篇教程
注意事项:
- FAILSAFE模式不是GPS返航,也****不要将FAILSAFE模式作为GPS返航来使用
- 如果需要设置GPS返航,请设置“GPS救援”通道
(5)GPS救援:GPS返航
开启该模式后,飞机就会自动飞回起飞点并降落

具体的返航参数通过“失控保护”页面的GPS救援选项卡设置
注意事项:
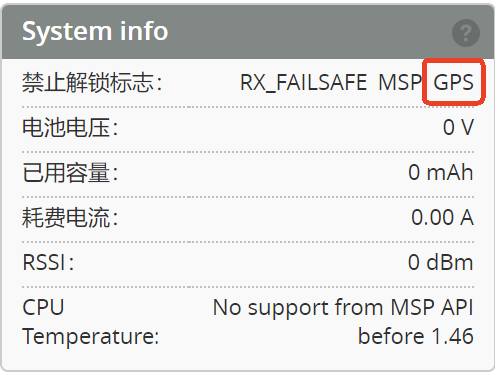
1)设置GPS后,才能看到该模式,未设置GPS时,该模式会被隐藏
2)设置GPS救援模式后,需要搜索到足够的卫星才能起飞,否则会提示“GPS”无法起飞
3)我们只建议在眼镜或遥控器丢失信号等紧急情况下启用GPS返航
并且在靠近起飞点时手动接管飞机进行降落
(6)FLIP OVER AFTER CRASH:反乌龟模式
需要在飞机上锁状态下开启,开启该模式后,飞机会进入反乌龟模式,退出反乌龟模式后,飞机需要重新上锁并解锁,才能恢复正常模式

反乌龟模式:可以在炸机后飞机翻转的情况下,通过遥控器操作使飞行器翻转回到正常飞行姿态,避免飞行器像乌龟一样无法自行翻转
注意事项:
1)使用反乌龟模式时,如果电机被地面,石头等卡住,有烧毁电机的风险,
因此我们建议在非紧急的情况下还是自行将飞机翻回正面
2)反乌龟模式需要电调支持才能使用(我们的电调都是支持的)
3.辅助模式
辅助模式是用于控制蜂鸣器,LED灯带的模式,
不会影响实际的飞行方式
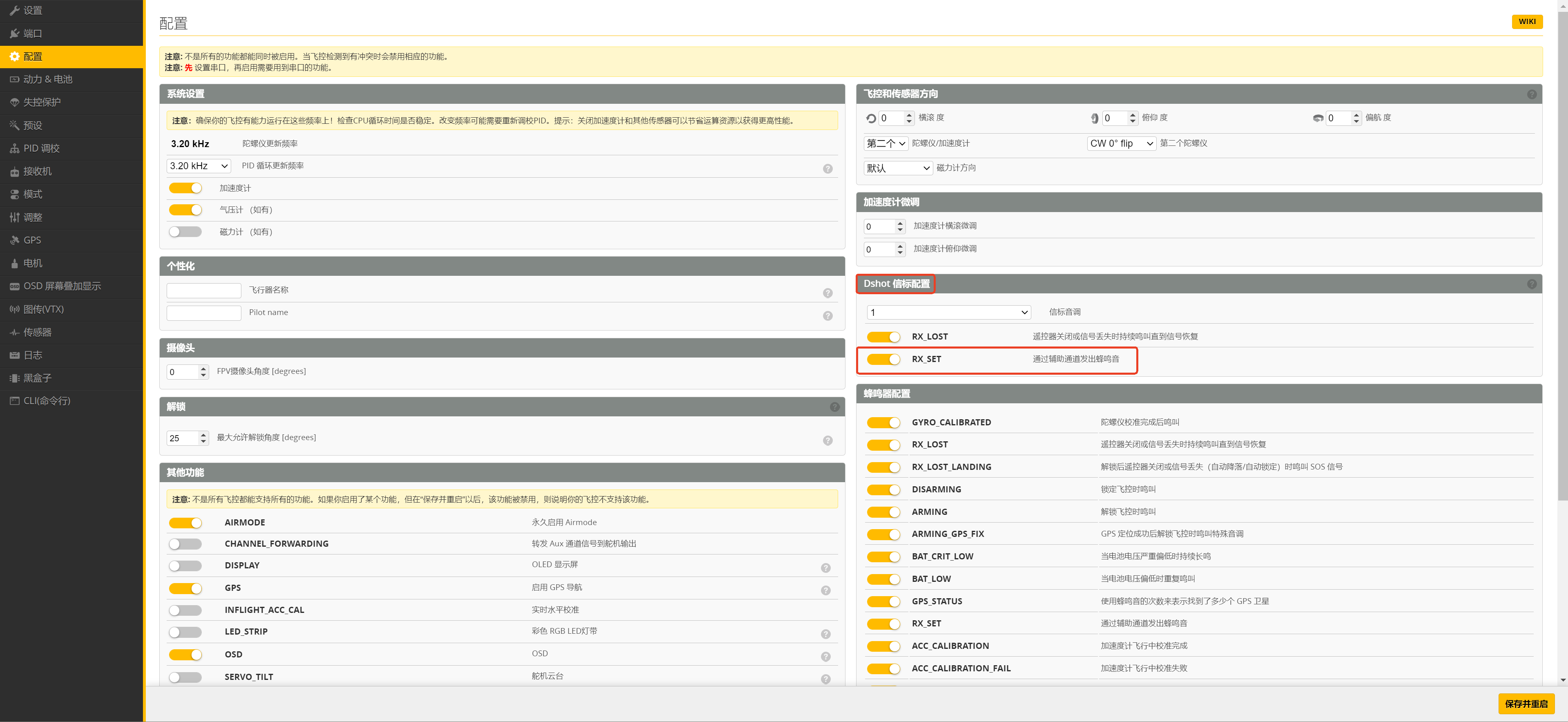
(1)BEEPER:蜂鸣器

激活该通道后,飞控上连接的蜂鸣器就会响起
如果没有连接蜂鸣器,可以通过开启”Dshot信标设置“中的"RX_SET"选项,使用电机发出蜂鸣声
(2)LEDLOW:LED灯带开关

激活该模式后,LED灯带会熄灭,该模式未激活时,LED灯带会亮起
设置LED灯带可以参考一下这篇文章: