如何设置空速计——Mission Planner地面站
一、原理
空速管(Pitot Tube)用于测量无人机在空中的飞行速度(空速),是固定翼无人机的重要传感器之一。空速管通过测量飞机前方动压与静压之差来确定飞行的相对速度。
ArduPilot飞控通过空速管采集的数据对无人机的飞行进行精准控制,例如改善自动飞行模式下的稳定性,优化巡航效率,提高安全性和飞行续航能力。
二、设备准备
1)飞控: SpeedyBee F405 WING APP /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)空速管传感器: 如MS4525DO。
3)地面站: Mission Planner地面站。
三、具体操作
3.1 空速管安装与接线
3.1.1 空速管的安装
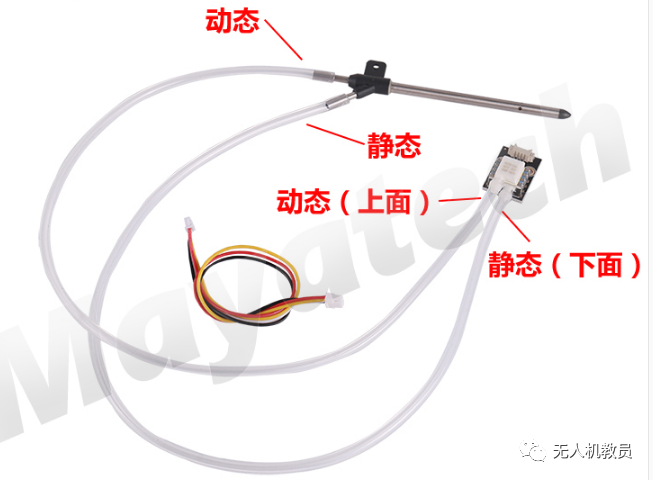

--图片来源于无人机教员公众号
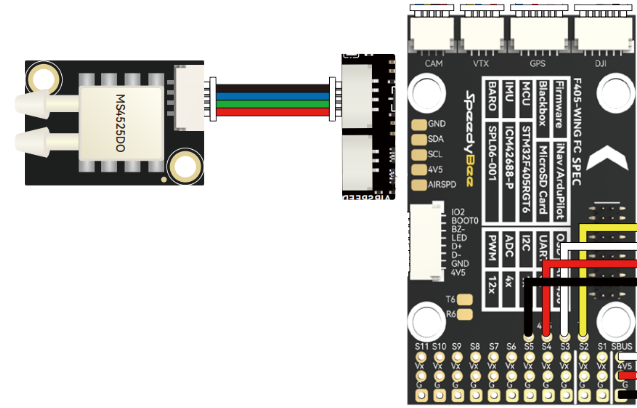
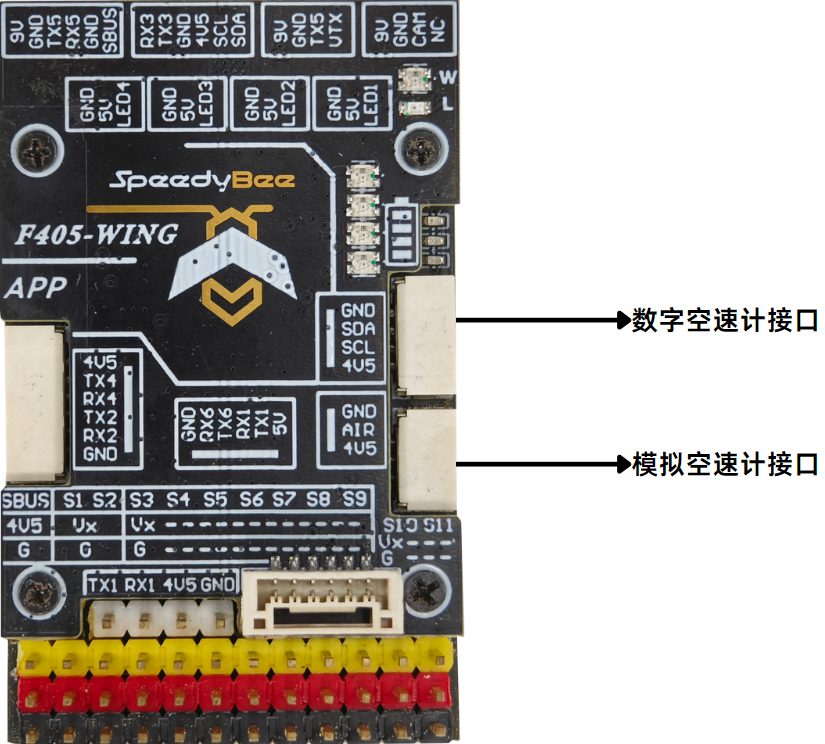
3.1.2 空速计与飞控接线
3.2 参数设置
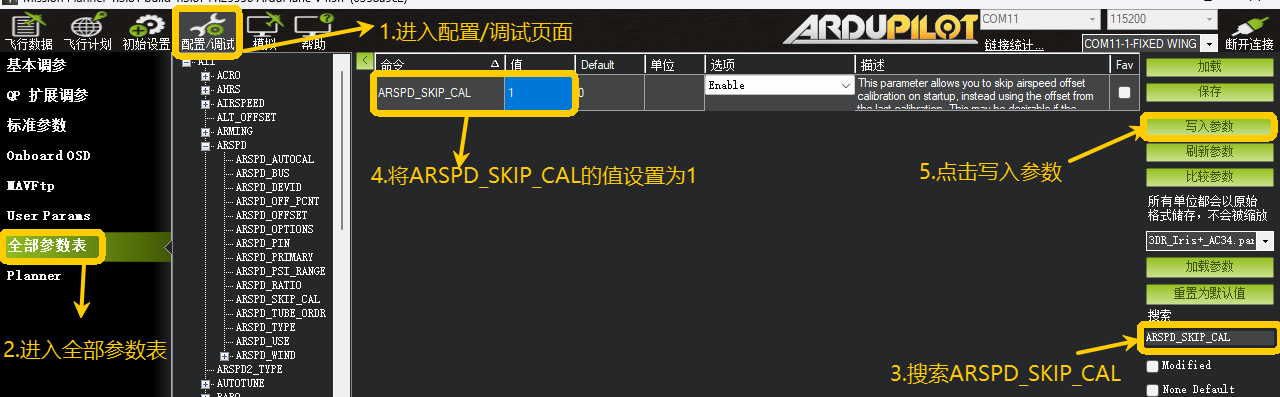
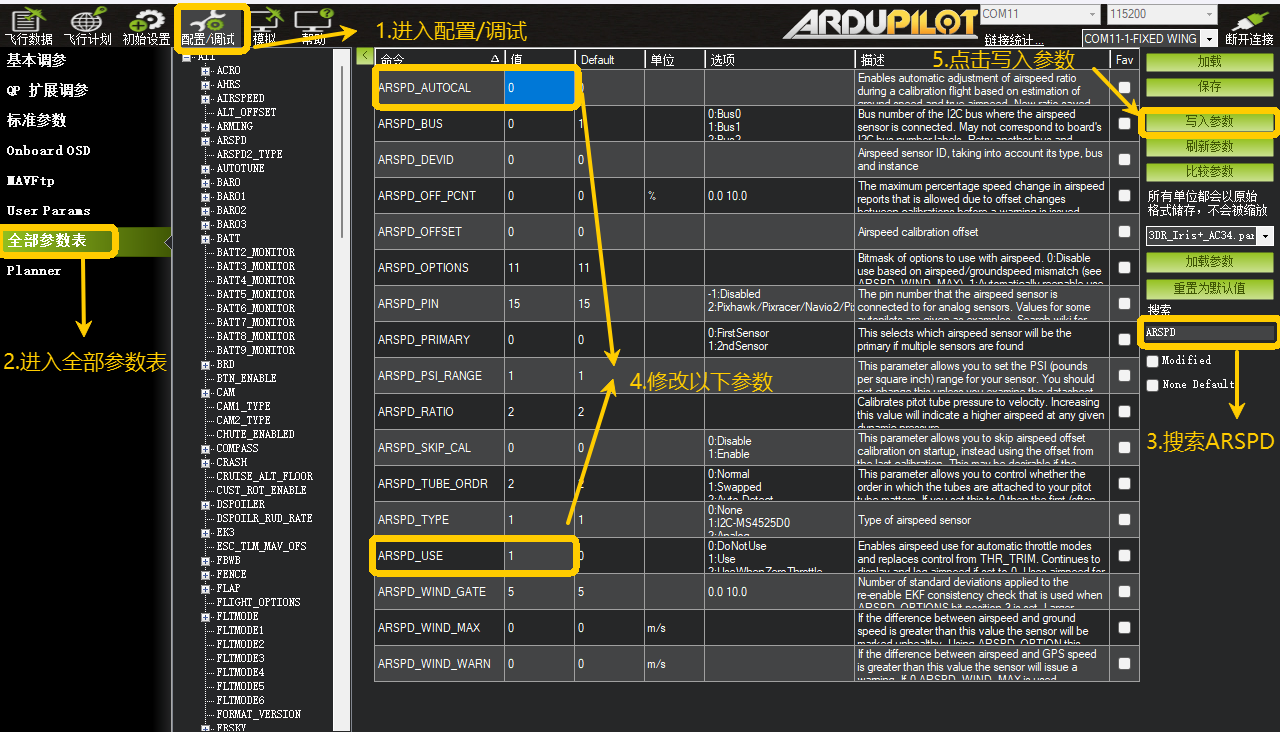
1.使用数据线将飞控连接至地面站,进入配置调试页面,进入全部参数表,搜索并修改以下参数:
| 参数设置 | 说明 |
|---|---|
| ARSPD_TYPE = 1 | 如MS4525请改成1,其他空速计请根据协议进行修改 |
| ARSPD_BUS = 0 | 使用飞控内部总线 |
| ARSPD_AUTOCAL = 1 | 起飞后自动校准飞行时的空速值 |
| ARSPD_USE = 0 | 不启用空速计,需要等校准完成后再启用 |
| ARSPD_SKIP_CAL = 0 | 上电时会进行空速计室内校准,校准其在无风状态下的空速值 |
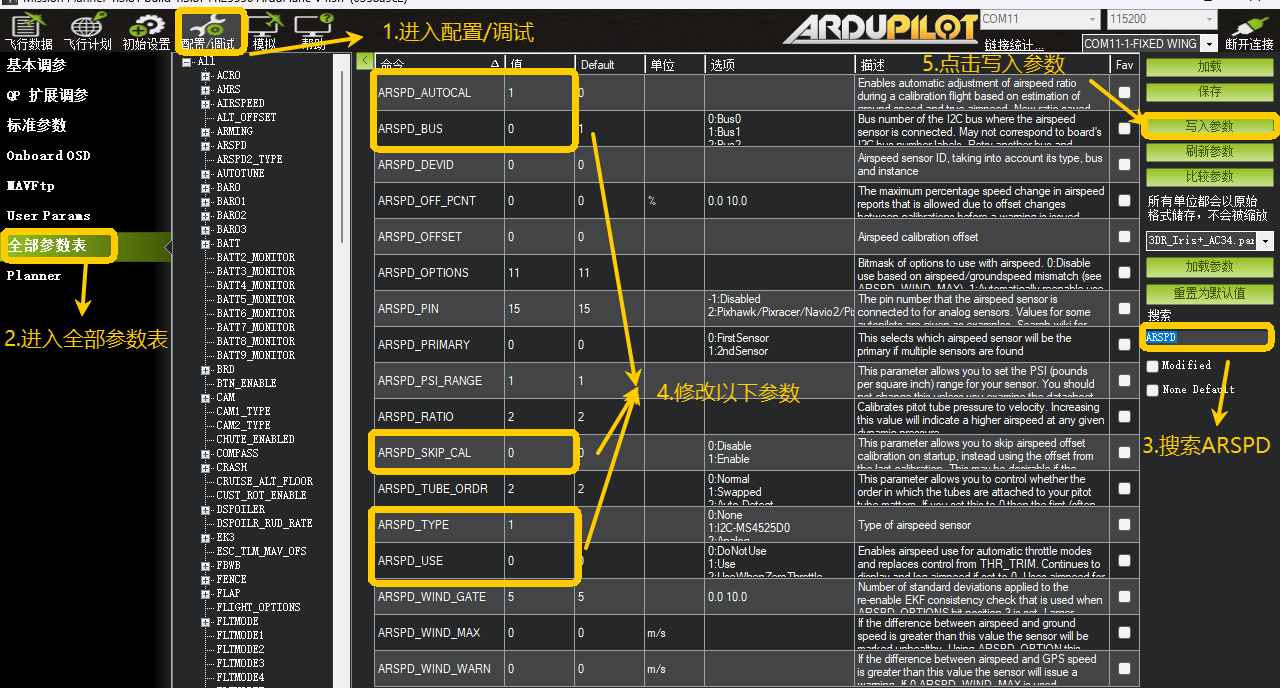
参数保存后,断开飞控所有供电,再次上电重启飞控。
2.在飞行数据页面,可以看到空速的实时数值。
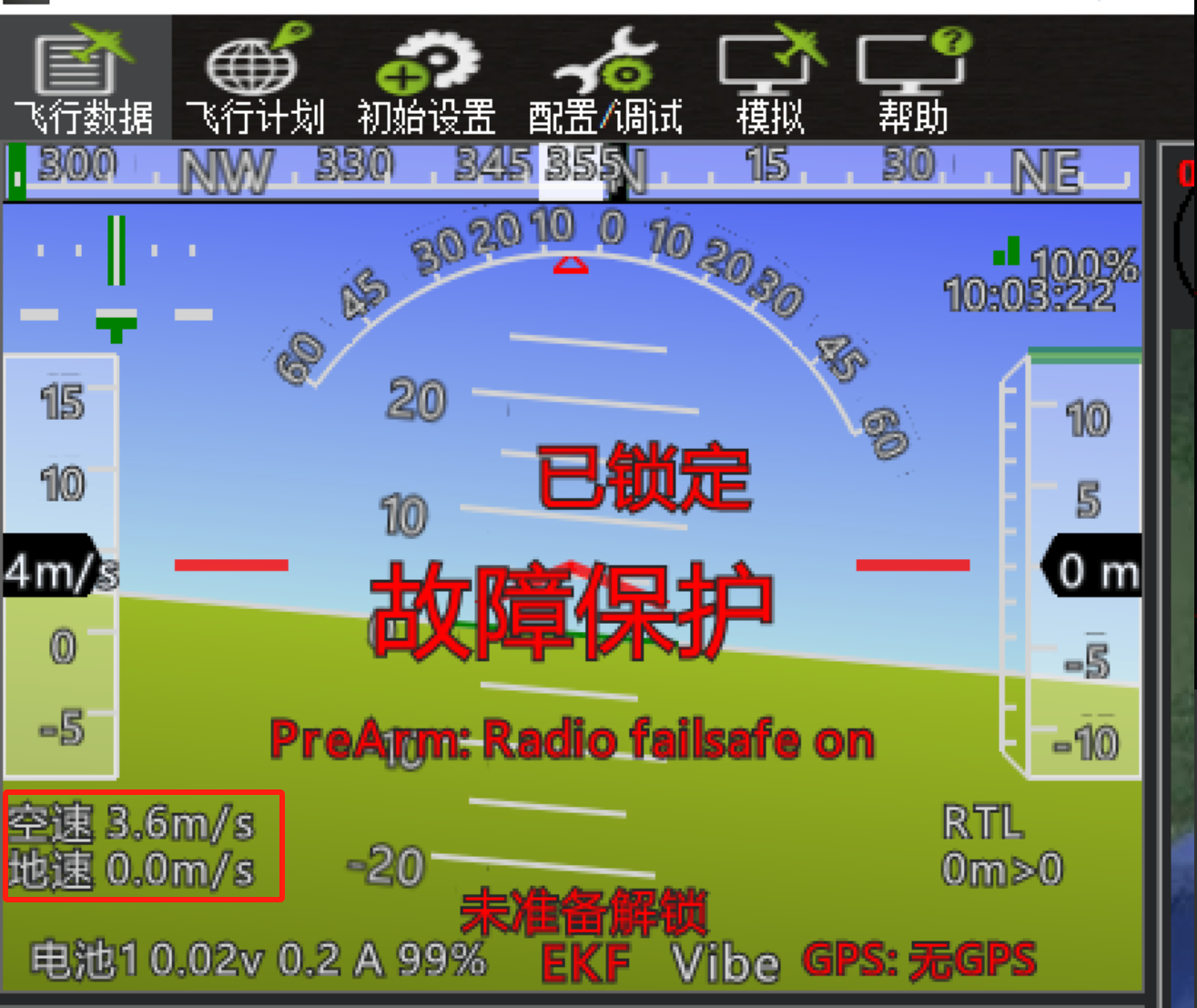
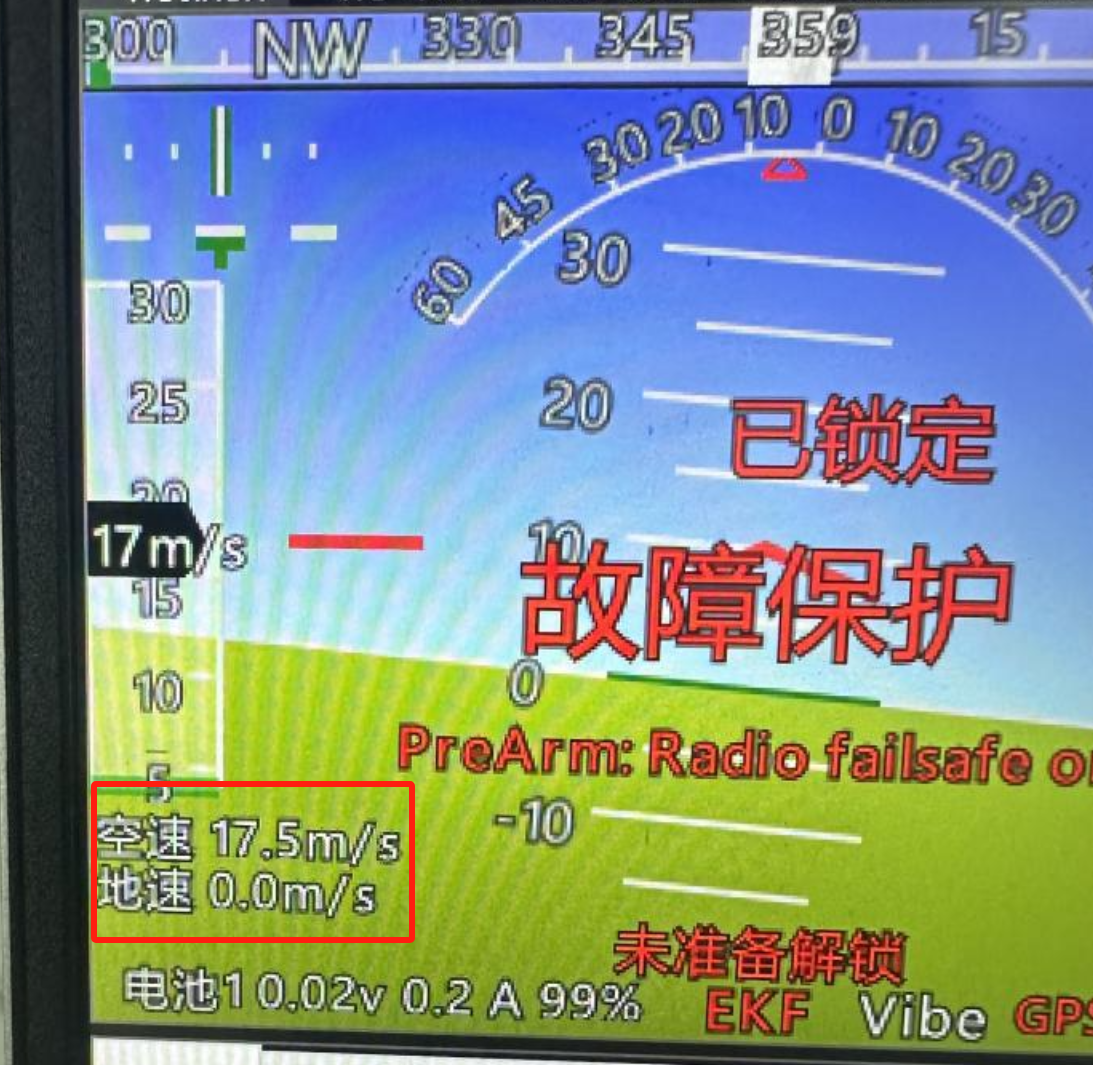
3.用手捂住空速管的动压孔和静压孔,检查空速计连接及工作是否正常。

空速如果在线性上升,表明空速管连接正常。如果出现较大波动,需要检查以下几点:
1.手是否堵住孔洞:确保所有孔洞被完全堵住,没有任何漏气的情况。
2.空速管连接:检查空速计各部件间连接是否有没有松动或漏气的情况。
3.3 室内静态校准(地面校准)
1.用瓶子稍微包住空速管,减小干扰。
2.将飞控重新上电。
3.检查空速跳动在0~2之间即可完成室内校准。
4.参数表中找到并设置 ARSPD_SKIP_CAL = 1,关闭室内校准。
参数保存后,断开飞控所有供电,再次上电重启飞控。
3.4 空中动态校准(飞行校准)
3.4.1 飞行校准
1.将飞机起飞,进入安全飞行高度后,切换到 RTL 模式。
2.让飞机绕圈飞行,保持大约 5分钟,时间越久校准数值越准确。
- 时间到达后降落。
4.降落后,导出 飞行Log,检查校准是否成功。
3.4.2 校准结果验证
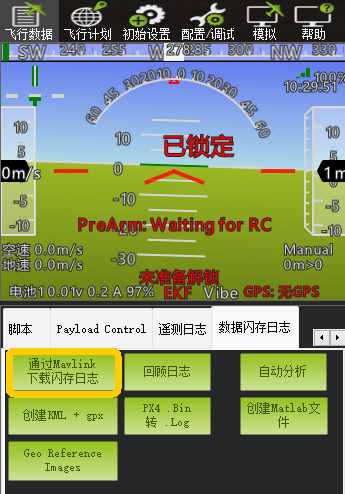
1.进入飞行数据界面,按小箭头,找到数据闪存日志界面。
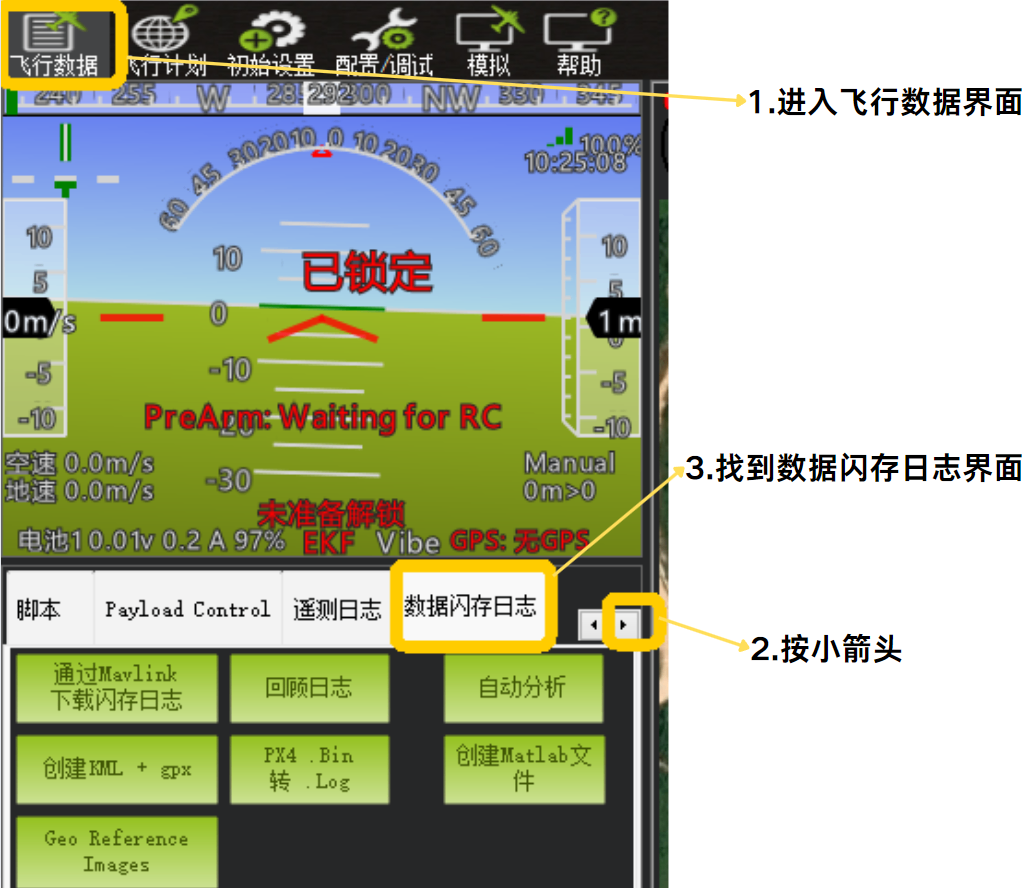
2.点击通过 Mavlink下载闪存日志。
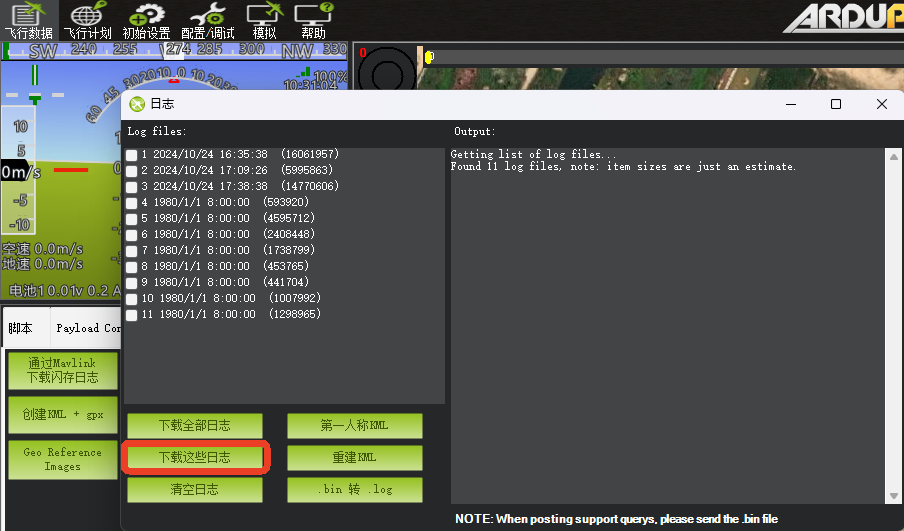
3.选择此次飞行的数据,点击 下载这些日志。下载完成后,关闭此窗口。
4.点击回顾日志,找到刚刚下载的日志。

- 在Mission Planner右侧的数据栏中,点击“+”展开列表:
- 首先找到并展开“0” → 然后找到并展开“ARSP”→ 再次展开其下的“0” ,勾选其中的“Airspeed”(红线);
- 接着继续展开“GPS” → 展开其下的“0” ,并勾选“Spd”(绿线)。
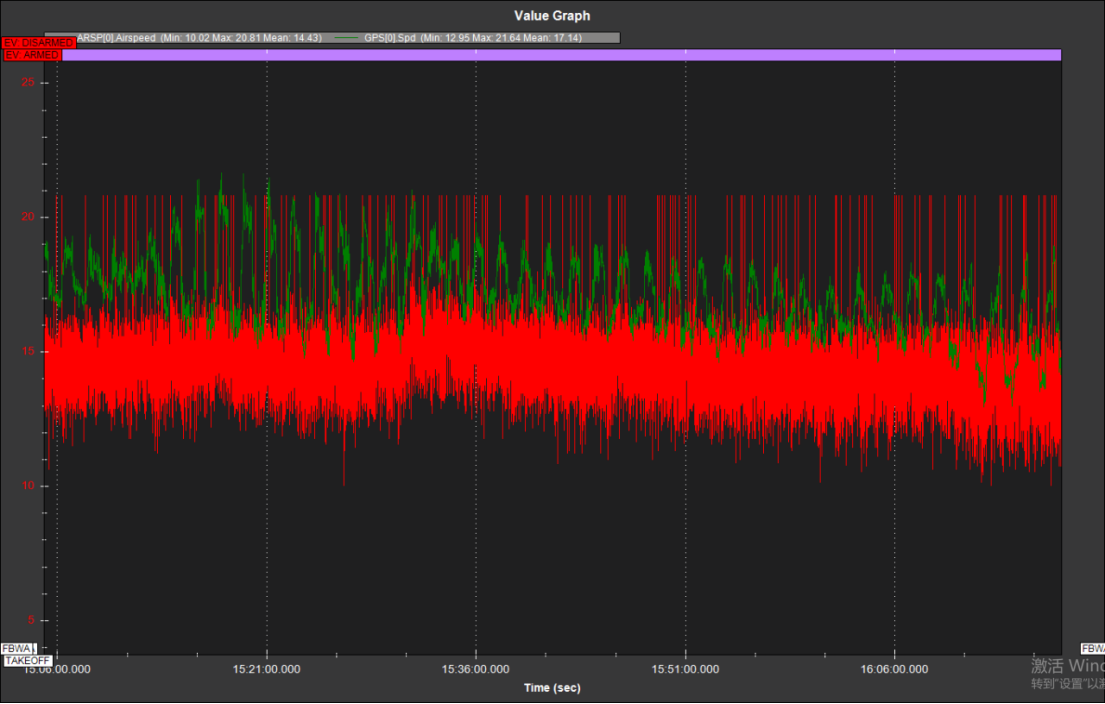
完成后,界面将同时显示空速(Airspeed)与GPS地速(Spd)两个数值,进行数据对比和分析。
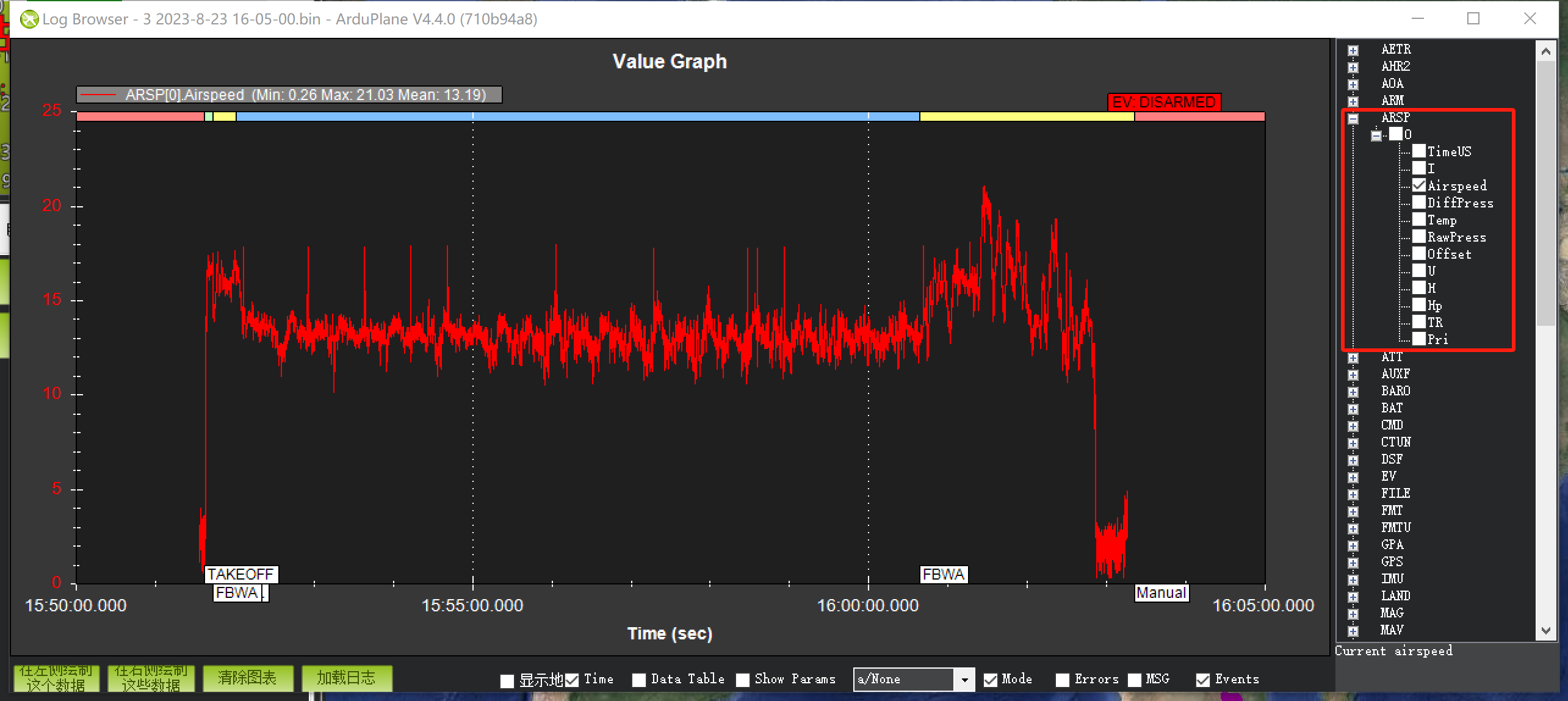
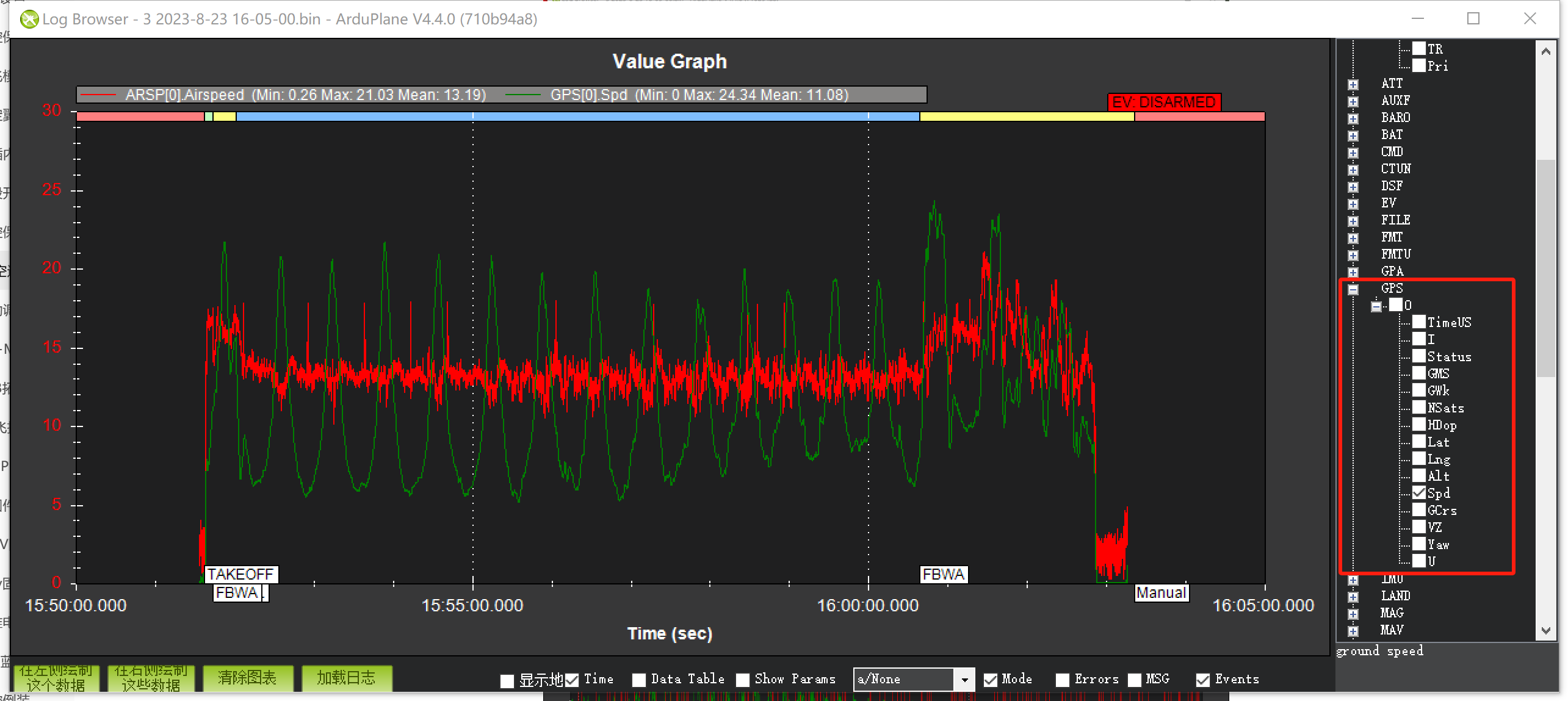
观察图中曲线可发现两个数据存在明显差异:
1.勾选的“Airspeed”(红线)数值变化较小且稳定,代表的是空速传感器测得的真实空速。
2.勾选的“Spd”(绿线)数值变化较大,这是因为飞机在空中盘旋时存在顺风和逆风飞行,导致GPS测得的地速波动较大。
3.在数据分析时,应重点关注界面上方的 ARSP 0的Mean 和 GPS 0的Mean 两个平均数值。 这两个平均值之间的差距越小,表示空速计校准精度越高。
4.一般而言,二者差值在 3m/s以内 均属于正常范围。若差值 明显超过3m/s, 建议重新进行空速校准,以确保飞行的安全性和稳定性。
6.空速校准完成,请进入全部表修改以下参数
| 参数修改 | 说明 |
|---|---|
| ARSPD_AUTOCAL = 1改成0 | 关闭飞行时自动校准 |
| ARSPD_USE = 0改成1 | 启用空速 |
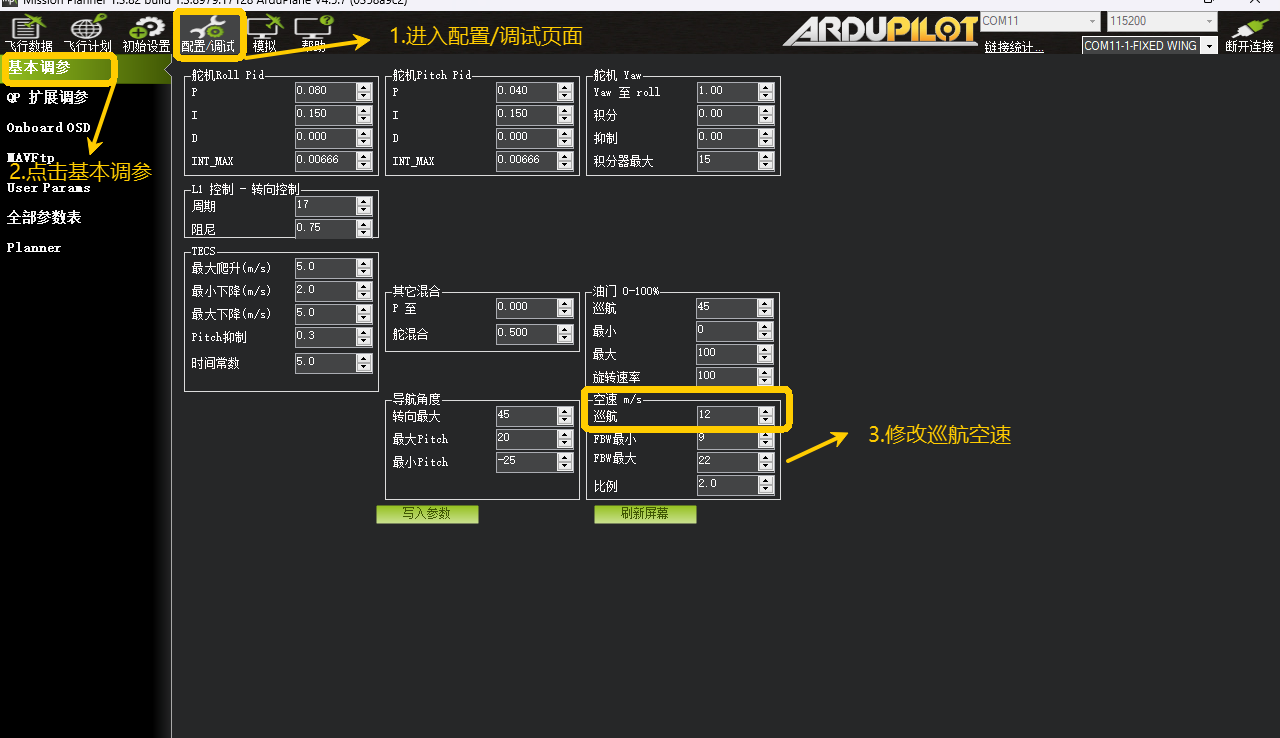
7.进入 配置/调试-基本参数,调整你所需要设置的巡航空速(注意单位m/s)。
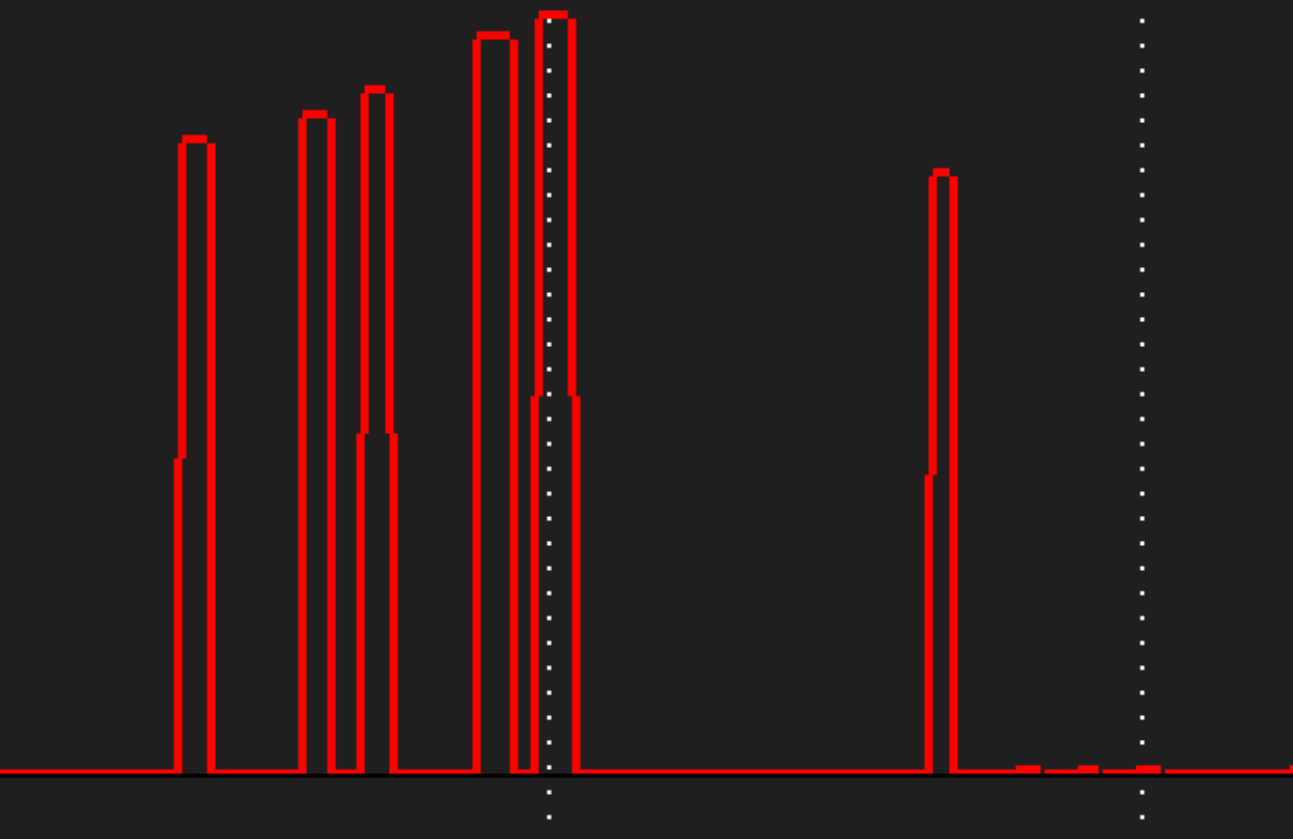
3.4.3 错误案例演示
1.可以看到该数据的波形不正常,空速一直低于地速,受干扰,Mean的差值也较大。
2.空速计经常报错,一般为空速计安装不好
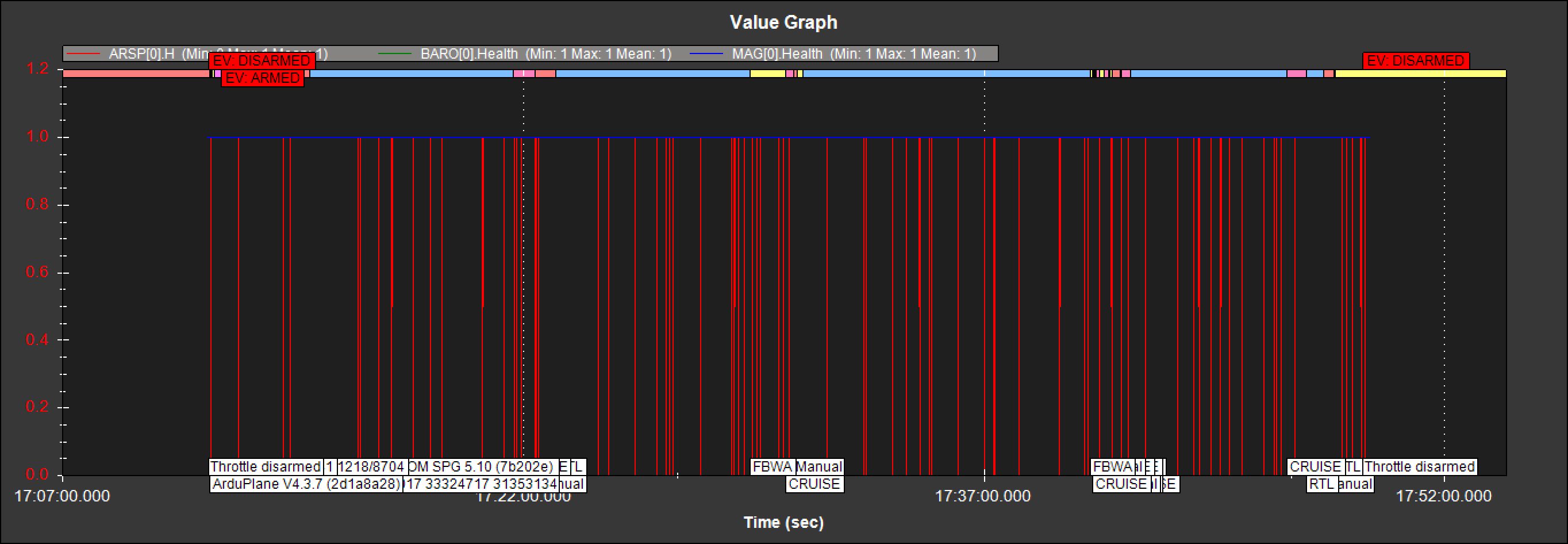
3.若出现解锁前正常,解锁之后出现空速计数值跳动的情况,可能是使用了读取速度较慢的SD卡导致。
四、Q&A
技术支持二维码
