如何确认舵面反馈是否正确
一、舵面检查的必要性
舵面反馈直接决定了飞控系统对遥控器输入的响应正确与否。错误的舵面方向可能导致控制错误,甚至直接导致炸机。
因此,在每次飞行前,都需要进行舵面检查。
舵面检查可以帮助我们:
- 确保手动模式下的舵面反馈与遥控器输入一致;
- 确保自稳模式下,飞控的自动修正方向正确;
- 及时发现舵机安装或设置错误,避免炸机。
二、常规机型舵面检查(T尾/倒T尾)
a.自稳模式下,舵面反馈检查
飞行模式切换至 FBWA(AP)/ ANGLE(INAV)
- 当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
- 当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
- 当飞机抬头时,升降舵面朝下。
- 当飞机低头时,升降舵面朝上。
自稳状态下,若遥控操作的方向舵正确,则自稳的方向舵反馈一定正确。若自稳反馈不正确请检查遥控操作的方向舵反馈 。
b.遥控操作输入,舵面反馈检查
飞行模式切换至 ACRO(AP)/ ACRO(INAV)
当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
- 当向上打升降杆时,反馈为升降舵面朝下。
- 当向下打升降杆时,反馈为升降舵面朝上。
- 当向左打方向杆时,反馈为方向舵面朝左。
- 当向右打方向杆时,反馈为方向舵面朝右。
三、 V尾机型舵面检查(升降和方向混控)
a.自稳模式下,舵面反馈检查
飞行模式切换至 FBWA(AP)/ ANGLE(INAV)
- 当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
- 当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
- 当飞机抬头时,反馈为两个舵面同时朝下。
- 当飞机低头时,反馈为两个舵面同时朝上。
自稳状态下,若遥控操作的方向舵正确,则自稳的方向舵反馈一定正确。若自稳反馈不正确请检查遥控操作的方向舵反馈 。
b.遥控操作输入,舵面反馈检查
飞行模式切换至 ACRO(AP)/ ACRO(INAV)
- 当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
- 当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
- 当向上打升降杆时,反馈为两个舵面同时朝下。
- 当向下打升降杆时,反馈为两个舵面同时朝上。
- 当向左打方向杆时,反馈为两个舵面同时朝左。
- 当向右打方向杆时,反馈为两个舵面同时朝右。
四、 飞翼机型舵面检查(副翼和升降混控)
a.自稳模式下,舵面反馈检查
飞行模式切换至 FBWA(AP)/ ANGLE(INAV)
- 当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
- 当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
- 当飞机抬头时,反馈为两个舵面同时朝下。
- 当飞机低头时,反馈为两个舵面同时朝上。
b.遥控操作输入,舵面反馈检查
飞行模式切换至 ACRO(AP)/ ACRO(INAV)
- 当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
- 当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
- 当向上打升降杆时,反馈为两个舵面同时朝下。
- 当向下打升降杆时,反馈为两个舵面同时朝上。
五、如何纠正错误的舵面反馈
在纠正舵面反馈时,先进行自稳模式的舵面反馈检查,再进行手动模式的舵面反馈检查。
a.自稳舵面反馈纠正
例子:
飞行模式切换至 STABILIZE(AP)/ ANGLE (AP),飞机在自稳模式下机头朝下,舵面反馈为升降舵面朝下,此情况为 错误的 自稳舵面反馈。
- ArduPilot固件的解决办法:
点击初始设置→点击Servo Output→将错误的自稳反馈的舵机输出(例Elevator-升降)勾选反向→将飞机机头朝下→查看升降舵面反馈是否为 朝上 →反馈正确→自稳舵面反馈纠正完毕。

- INAV固件的解决办法:
例如给飞机一个左滚转的姿态,飞机处于自稳模式时,舵面会想把飞机拉平,所以此时反馈应该是左舵面往下,右舵面往上,如果舵面左边反馈是反的,将SERVO1反向即可。

b.手动舵面反馈纠正
例子:
在自稳模式下,飞机的舵面反馈已正确;飞行模式切换至 Manual,飞机在手动模式下 向左打副翼杆,舵面反馈为 左机翼舵面朝下,右机翼舵面朝上,此情况为 错误的 手动舵面反馈。
解决办法:
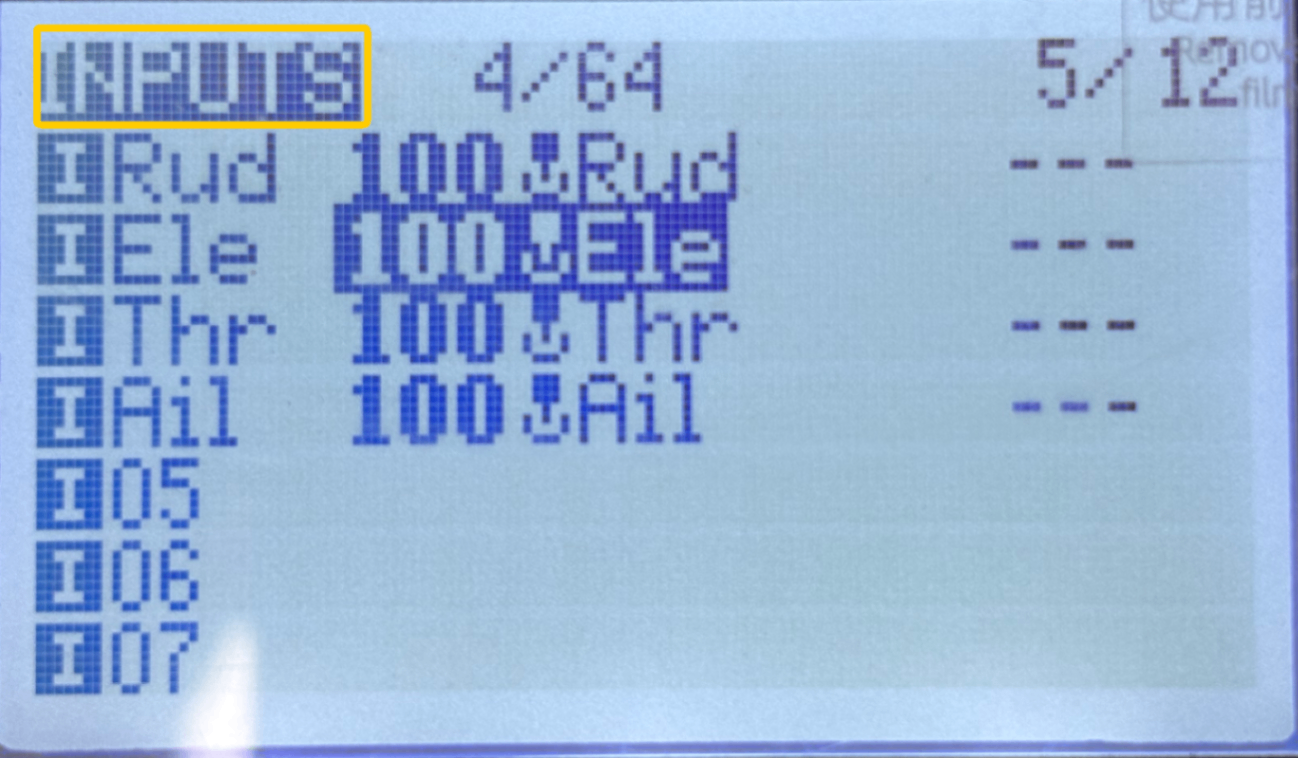
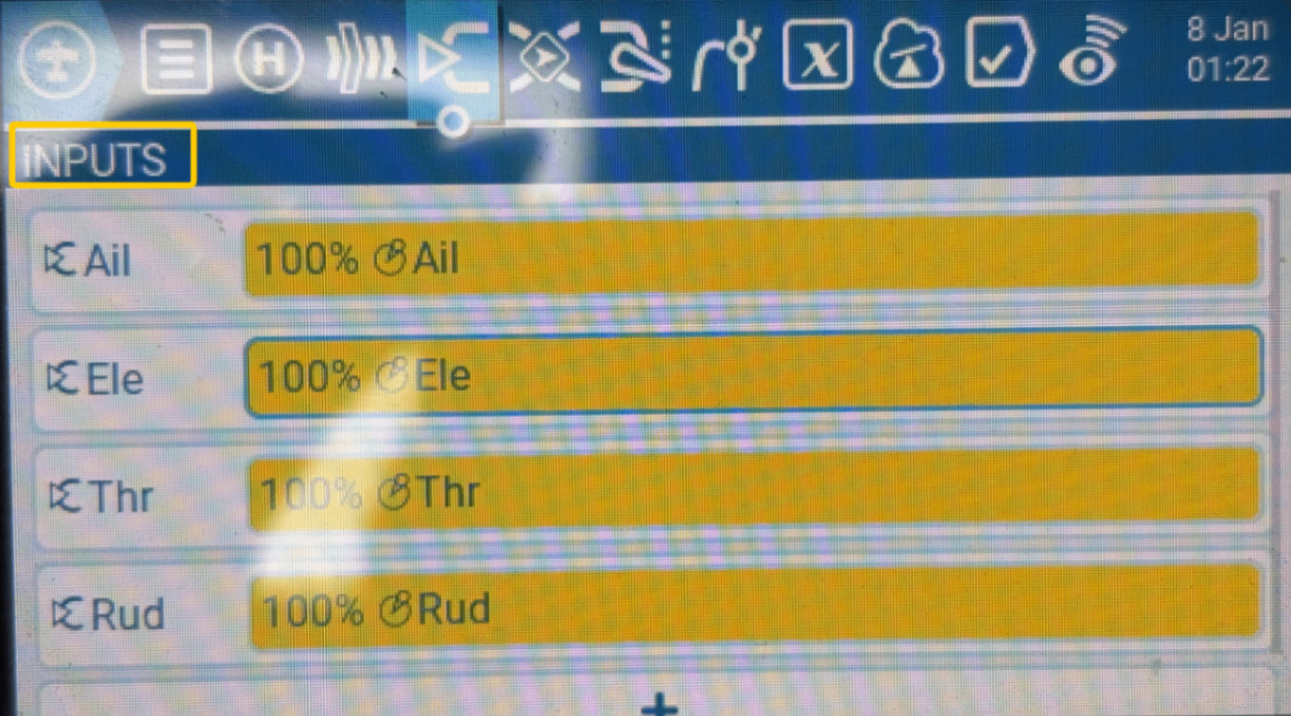
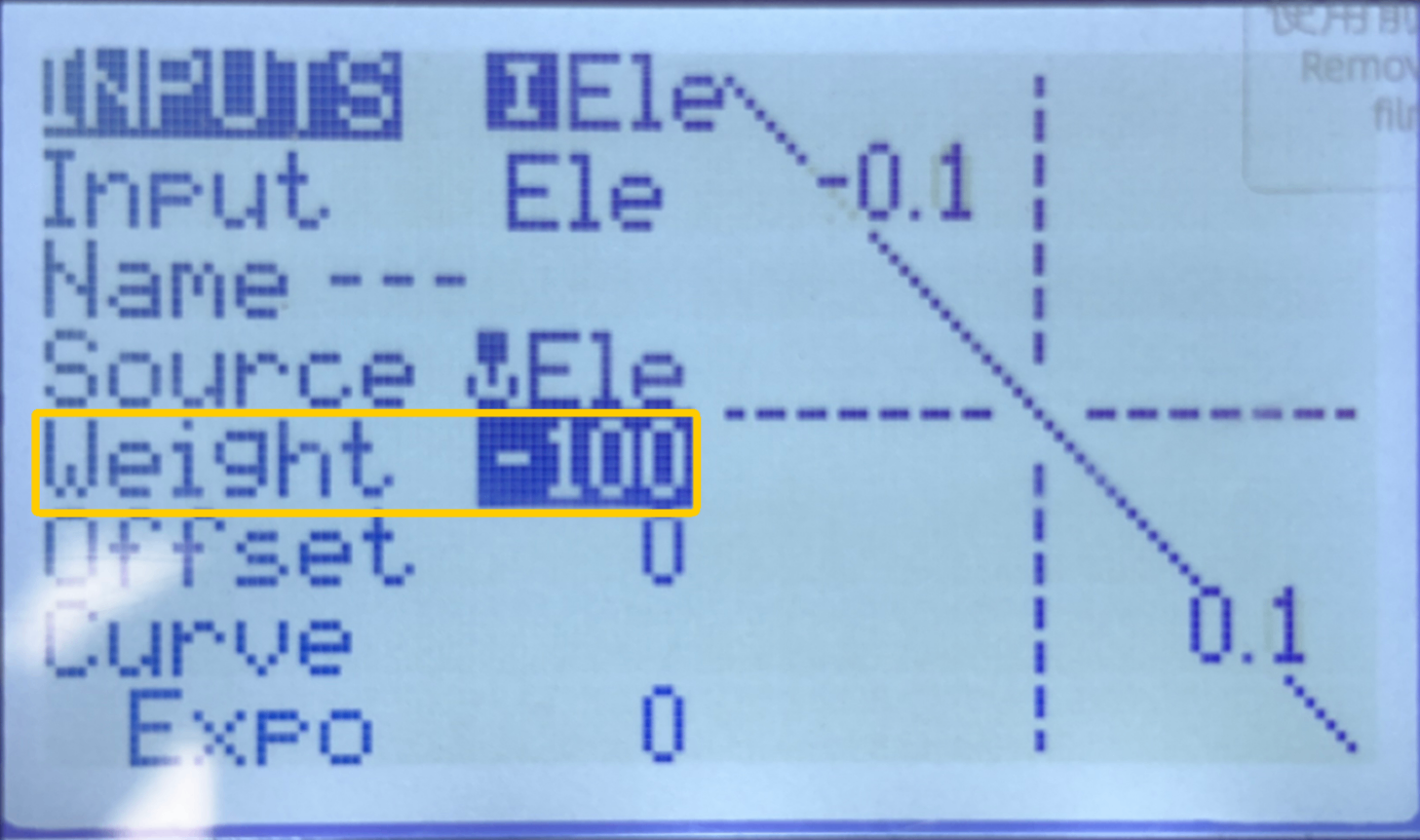
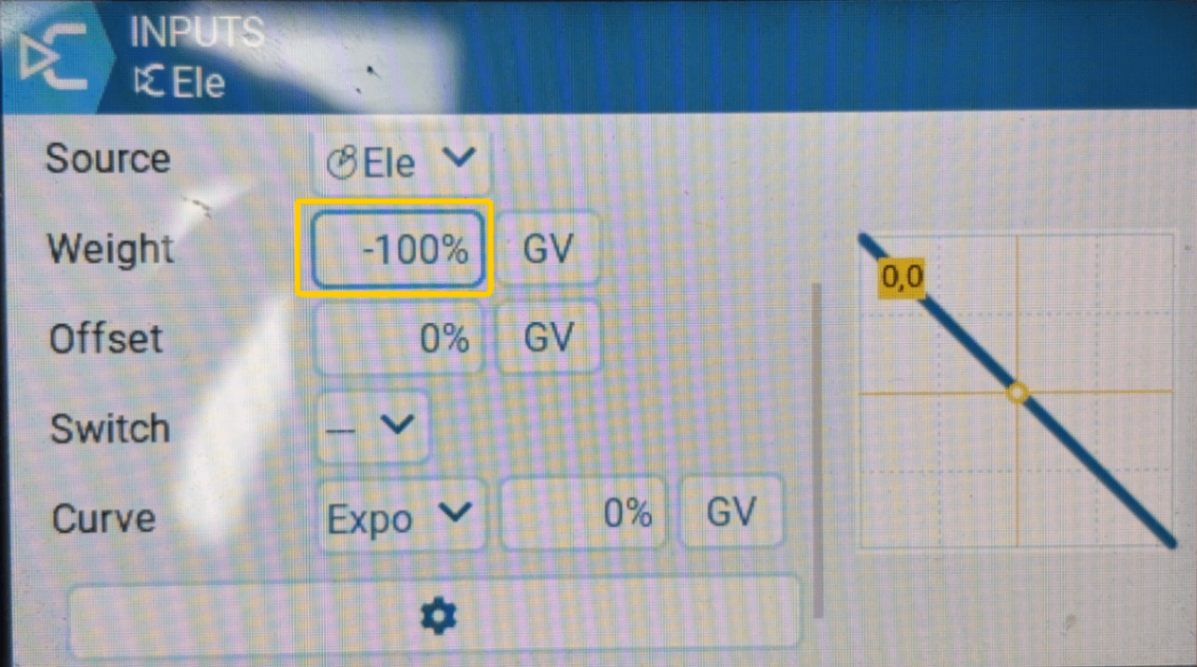
进入遥控器的 INPUT 设置界面,选择错误反馈的对应遥控器通道,将其反向→打杆检查飞机舵面反馈→反馈正确,手动舵面反馈纠正完毕。
其他舵面的反馈纠正以此类推。
技术支持二维码
