关于MP地面站的解锁前检查项说明
一、介绍
ArduPilot 固件中设置了一套“解锁前安全检查”机制,在发现校准缺失、配置错误或传感器数据异常等问题时,会阻止飞行器解锁。这些检查的目的是防止炸机等事故的发生,但在必要时某些检查也可以被禁用。
切勿禁用解锁检查(即 ARMING_CHECK 不应设置为 “0”),台架测试除外。在尝试飞行之前,必须先解决所有的解锁前或解锁失败问题。否则可能导致飞行器炸机。
二、如何查看解锁前检查失败项
当你无法解锁飞行器,就表明存在解锁前检查失败。要准确识别是哪项检查失败,可按以下步骤操作:
- 使用 USB 数据线或数传模块将飞控连接至地面站。
- 确保地面站已成功连接飞控。
- 接收机与遥控器对频,并尝试解锁飞行器。
- 第一项触发解锁前检查失败的原因会以红色文字显示在 HUD 窗口 中。
- 所有未通过的解锁前检查也会以 消息 形式每隔约 30 秒发送一次到地面站(仅当飞控未解锁时)。 若您希望仅在尝试解锁失败时才发送这些消息,可以将 ARMING_OPTIONS 的第 1 位启用(即设置为数值 1)。

三、解锁前失败消息
3.1 适用于所有机型
| Message | 消息(中文) | 原因 | 解决方法 |
|---|---|---|---|
| 3D Accel calibration needed | 需要进行3D加速度计校准 | 加速度计尚未校准 | 完成加速度计校准 |
| Accels calibrated requires reboot | 加速度计已校准,需重启 | 校准完成后需重启飞控 | 重启飞控 |
| Accels inconsistent | 加速度计数据不一致 | 两个加速度计之间的数据差异超过 0.75 m/s² | 重新校准加速度计,等待飞控预热后重启。如问题仍存在,请更换飞控 |
| ADSB out of memory | ADS-B内存不足 | 飞控内存资源耗尽 | 禁用部分功能或更换更高性能的飞控 |
| Accels not healthy | 加速度计状态异常 | 至少一个加速度计无法提供数据 | 重启飞控。如问题持续,建议更换飞控 |
| AHRS: not using configured AHRS type | AHRS:未使用配置的AHRS类型 | EKF3尚未准备好,飞控正在使用DCM姿态解算方式 | 如在室内,请移至户外;确保GPS定位良好;检查EKF配置(如 AHRS_EKF_TYPE 参数设置) |
| AHRS: waiting for home | AHRS:等待Home点 | GPS尚未定位成功 | 如在室内,请移至户外;确保已完成指南针与加速度计校准;排除可能干扰GPS信号的射频干扰源 |
| Airspeed 1 not healthy | 空速计1状态异常 | 飞控无法读取空速传感器数据 | 检查传感器的物理连接和参数配置 |
| AP_Relay not available | AP_Relay 不可用 | 降落伞配置错误 | 降落伞通过继电器控制,但飞控中未启用继电器功能。请使用定制编译版本并启用继电器功能 |
| Auxiliary authorisation refused | 辅助授权被拒绝 | 外部系统拒绝了授权请求 | 检查外部授权系统设置 |
| Batch sampling requires reboot | 批量采样需要重启 | 启用了批量采样功能,需重启飞控 | 重启飞控或检查批量采样(Batch sampling)配置 |
| Battery below minimum arming capacity | 电池容量低于允许解锁的最小值 | 当前电池容量低于 BATT_ARM_MAH 设置值 | 更换电池或调整 BATT_ARM_MAH 参数 |
| Battery below minimum arming voltage | 电池电压低于允许解锁的最小值 | 当前电池电压低于 BATT_ARM_VOLT 设置值 | 更换电池或调整 BATT_ARM_VOLT 参数 |
| Battery capacity failsafe critical >= low | 电池容量紧急阈值高于低容量阈值 | 电池容量失效保护参数设置错误 | 确保 BATT_LOW_MAH 的数值高于 BATT_CRT_MAH |
| Battery critical capacity failsafe | 电池容量触发紧急失效保护 | 当前容量低于 BATT_CRT_MAH 设定值 | 更换电池或调整 BATT_CRT_MAH 参数 |
| Battery critical voltage failsafe | 电池电压触发紧急失效保护 | 当前电压低于 BATT_CRT_VOLT 设定值 | 更换电池或调整 BATT_CRT_VOLT 参数 |
| Battery low capacity failsafe | 电池容量触发低电量失效保护 | 当前容量低于 BATT_LOW_MAH 设定值 | 更换电池或调整 BATT_LOW_MAH 参数 |
| Battery low voltage failsafe | 电池电压触发低电压失效保护 | 当前电压低于 BATT_LOW_VOLT 设定值 | 更换电池或调整 BATT_LOW_VOLT 参数 |
| Battery unhealthy | 电池状态异常 | 电池没有提供有效数据 | 检查电池监测模块的物理连接与配置 |
| Battery voltage failsafe critical >= low | 电池电压紧急阈值高于低电压阈值 | 电池电压失效保护参数设置错误 | 确保 BATT_LOW_VOLT 数值高于 BATT_CRT_VOLT |
| BendyRuler OA requires reboot | BendyRuler避障功能需重启 | 修改了避障配置,需重启飞控 | 重启飞控并查看避障(Object Avoidance)配置 |
| Board (Xv) out of range 4.3-5.8v | 飞控板电压异常(Xv电压应为4.3-5.8V) | 板载电压低于 BRD_VBUS_MIN 或过高 | 检查供电情况;若使用USB供电,请接上电池或更换USB线 |
| BTN_PINx=y invalid | BTN_PINx=y 配置无效 | 按键引脚设置错误 | 检查按键设置说明,BTN_PIN 设置了无效值 |
| BTN_PINx=y, set SERVOz_FUNCTION=-1 | BTN_PINx=y,请设置 SERVOz_FUNCTION=-1 | 按键功能配置错误 | 将对应通道的 SERVOz_FUNCTION 设置为 -1 以禁用控制输出 |
| Can’t check rally without position | 无法检查集结点(无位置信息) | EKF 尚未提供位置信息 | 等待 EKF 获取位置,或移动到 GPS 信号较好的区域 |
| Check fence | 检查电子围栏 | 电子围栏功能初始化失败 | 重启飞控 |
| Check mag field (xy diff:x>875) | 检查磁场(XY差异:x > 875) | 指南针水平磁场强度过大或过小 | 将飞行器远离周围金属物体,将指南针远离机架金属,重新校准指南针,禁用内置指南针 |
| Check mag field (z diff:x>875) | 检查磁场(Z差异:x > 875) | 指南针垂直磁场强度过大或过小 | 将飞行器远离周围金属物体,将指南针远离机架金属,重新校准指南针,禁用内置指南针 |
| Check mag field: x, max y, min z | 检查磁场:x、最大y、最小z | 指南针磁场强度异常 | 将飞行器远离周围金属物体,将指南针远离机架金属,重新校准指南针,禁用内置指南针 |
| Chute has no channel | 降落伞未配置通道 | 降落伞配置错误 | 当前使用PWM方式控制降落伞,但未配置伺服输出功能(例如需设置 SERVOx_FUNCTION = 27)。 |
| Chute has no relay | 降落伞未配置继电器 | 降落伞配置错误 | 当前使用继电器方式控制降落伞,但未配置继电器输出。 |
| Chute is released | 降落伞已释放 | 降落伞已触发释放 | 重启飞控 |
| Compass calibrated requires reboot | 指南针校准完成,需重启 | 完成指南针校准后需要重启飞控 | 重启飞控 |
| Compass calibration running | 指南针正在校准中 | 正在进行指南针校准 | 完成或取消指南针校准操作 |
| Compass not healthy | 指南针状态异常 | 至少一个指南针未提供有效数据 | 检查指南针与飞控的连接及其配置参数 |
| Compass offsets too high | 指南针偏移过大 | 指南针偏移参数设置过大 | 将指南针移离金属干扰源,重新校准指南针,禁用内置指南针,或提高 COMPASS_OFFS_MAX 参数值 |
| Compasses inconsistent | 多个指南针数据不一致 | 两个指南针的角度或磁场强度不一致 | 检查指南针朝向设置(如 COMPASS_ORIENT),将指南针远离金属干扰源,重新校准,禁用内置指南针 |
| CrashDump data detected | 检测到崩溃日志(CrashDump) | 已记录飞控CPU崩溃数据 | 飞控已发生崩溃并记录日志,当前飞行器可能不安全,请查看崩溃日志(CRASH DUMP) |
| Dijkstra OA requires reboot | 避障配置(Dijkstra算法)已更改,需重启 | 避障配置已更改,需重启飞控 | 重启飞控, |
| Disarm Switch on | 解锁开关已开启 | 解锁辅助开关处于高电平状态 | 将解锁开关拨至低电平,或检查辅助功能设置 |
| Downloading logs | 正在下载日志 | 下载日志时无法解锁飞控 | 等待日志下载完成、取消下载或重启飞控 |
| DroneCAN: Duplicate Node x../y! | DroneCAN 节点 ID 冲突 | 两个设备使用了相同的 DroneCAN 节点 ID | 设置 CAN_D1_UC_OPTION = 1 清除 DNS 缓存并重启飞控 |
| DroneCAN: Failed to access storage! | DroneCAN 存储访问失败 | 可能存在硬件问题 | 重启飞控 |
| DroneCAN: Failed to add Node x! | 无法添加 DroneCAN 节点 | 无法初始化与设备的连接 | 检查传感器的物理连接和电源 |
| DroneCAN: Node x unhealthy! | DroneCAN 节点状态异常 | 某个 DroneCAN 设备未能提供有效数据 | 检查传感器的物理连接和电源 |
| Duplicate Aux Switch Options | 辅助功能开关配置重复 | 两个辅助开关被配置为相同功能 | 检查辅助功能设置,确认 RCx_OPTION 参数值不重复 |
| EKF3 Roll/Pitch inconsistent by x degs | EKF3 横滚/俯仰角估算不一致(偏差 x 度) | 横滚或俯仰角的姿态估算值不一致 | 通常是 EKF3 GPS 精度不足导致,也可能是其他传感器误差。请移至户外、等待,或重启飞控 |
| EKF3 waiting for GPS config data | EKF3 正在等待 GPS 配置数据 | GPS 自动配置尚未完成 | 检查 GPS 的连接与配置,尤其是在使用 DroneCAN GPS 的情况下 |
| EKF3 Yaw inconsistent by x degs | EKF3 偏航角估算不一致(偏差 x 度) | 偏航角的姿态估算值不一致 | 等待或重启飞控 |
| Failed to open mission.stg | 无法打开 mission.stg 文件 | 无法从 SD 卡加载任务 | 检查 SD 卡,尝试重新保存任务文件 |
| Failed to create log directory /APM/LOGS : ENOMEM | 无法创建日志目录(内存不足) | 无法在 SD 卡上创建日志目录 | 减小日志缓存大小,或禁用其他占用内存的功能 |
| Fence requires position | 电子围栏功能需要位置估算 | 开启电子围栏后需要有效位置数据 | 等待 GPS 定位,或移动至开阔区域,减少干扰源 |
| FENCE_ALT_MAX < FENCE_ALT_MIN | 最大围栏高度小于最小围栏高度 | 最大高度必须大于最小高度 | 增大最大高度或减小最小高度 |
| FENCE_MARGIN is less than FENCE_RADIUS | 围栏边距小于围栏半径 | 围栏边距必须大于围栏半径 | 增加围栏半径或减小边距 |
| FENCE_MARGIN too big | 围栏边距过大 | 高度范围小于边距的两倍 | 减小边距或增大高度范围 |
| Fences enabled, but none selected | 已启用电子围栏但未定义区域 | 启用了围栏功能但未配置任何围栏 | 关闭围栏功能或添加围栏定义 |
| Fences invalid | 电子围栏设置无效 | 多边形围栏不合法 | 检查围栏是否存在线段重叠 |
| FETtec: Invalid motor mask | FETtec 电机掩码无效 | FETtec 配置错误 | 检查 FETtec 配置 |
| FETtec: Invalid pole count x | FETtec 极数无效 | FETtec 配置错误 | 检查 FETtec 配置 |
| FETtec: No uart | FETtec 未检测到串口 | FETtec 配置错误 | 检查 FETtec 配置 |
| FETtec: Not initialised | FETtec 未初始化 | ESC 未与飞控通信 | 检查 FETtec 配置 |
| FETtec: x of y ESCs are not running | 部分 ESC 未运行 | 某些 ESC 未正常转动 | 检查 FETtec 配置 |
| FETtec: x of y ESCs are not sending telem | 部分 ESC 未发送遥测 | 某些 ESC 未与飞控通信 | 检查 FETtec 配置 |
| FFT calibrating noise | 正在进行 FFT 噪声校准 | 谐波陷波分析尚未完成 | 等待飞行中的 FFT 分析完成 |
| FFT config MAXHZ xHz > yHz | FFT 最大频率设置错误 | FFT 设置错误 | 查看飞行中 FFT 设置说明 |
| FFT self-test failed, max error Hz | FFT 自检失败 | 谐波陷波功能失败 | 查看 FFT 设置说明 |
| FFT still analyzing | FFT 仍在分析中 | 谐波陷波分析尚未完成 | 等待飞行中的 FFT 分析完成 |
| FFT: calibrated xHz/xHz/xHz | FFT 校准完成(频率) | FFT 配置存在问题 | 查看飞行中 FFT 设置说明 |
| FFT: resolution is xHz, increase length | FFT 频率分辨率不足 | 分析窗口过短导致分辨率过低 | 查看 FFT 设置并增大采样长度 |
| Generator: Not healthy | 发电机状态异常 | 发电机未与飞控通信 | 检查发电机配置 |
| Generator: No backend driver | 缺少发电机驱动 | 固件未包含所需发电机驱动 | 使用 custom.ardupilot.org 定制包含发电机驱动的固件 |
| GPS alt error xm (see BARO_ALTERR_MAX) | GPS 与气压高度差异过大 | GPS 与气压计高度差异过大 | 参考 BARO_ALTERR_MAX 参数说明 |
| GPS and AHRS differ by Xm | GPS 与 AHRS 位置差异过大 | GPS 与 EKF 位置估算相差至少 10 米 | 等待 GPS 质量改善,移至空旷区域,减少射频干扰 |
| GPS blending unhealthy | GPS 融合状态异常 | 至少一个 GPS 提供的数据无效 | 将飞行器移至开阔区域,减少干扰,并检查 GPS 融合配置 |
| GPS Node x not set as instance y | GPS 节点编号设置错误 | DroneCAN GPS 配置错误 | 检查 GPS1_CAN_NODEID 和 GPS2_CAN_NODEID 设置 |
| GPS positions differ by Xm | 多个 GPS 位置差异过大 | 两个 GPS 报告的位置相差 50 米以上 | 等待 GPS 质量改善,移至空旷区域,减少干扰 |
| GPS x still configuring this GPS | GPS 正在自动配置中 | GPS 自动配置尚未完成 | 等待配置完成,特别是在使用 DroneCAN GPS 时,检查连接与配置 |
| GPS x: Bad fix | GPS 无法锁定位置 | GPS 未获取有效定位 | 移至空旷区域,减少干扰 |
| GPS x: not healthy | GPS 状态异常 | GPS 未提供数据 | 检查 GPS 与飞控的物理连接和参数配置 |
| GPS x: primary but TYPE 0 | 主 GPS 类型未配置 | 主 GPS 未正确设置类型 | 检查 GPS_PRIMARY 设置,并确认 GPS1_TYPE 或 GPS2_TYPE 与实际硬件匹配 |
| GPS x: was not found | GPS 未找到 | GPS 未连接或配置错误 | 检查 GPS 的连接与配置 |
| GPSx yaw not available | GPS 航向功能不可用 | 配置了 GPS 航向但未正常工作 | 移至信号更好的区域,检查 GPS 航向设置 |
| Gyro x rate yHz < loop rate z Hz | 陀螺仪刷新率低于主循环速率 | 飞控主循环频率超过陀螺仪数据更新频率 | 降低 SCHED_LOOP_RATE 参数 |
| Gyros inconsistent | 多个陀螺仪数据不一致 | 两个陀螺仪之间至少有 5 度/秒误差 | 重启飞控并保持静止直到完成陀螺仪校准,若问题持续请更换飞控 |
| Gyros not calibrated | 陀螺仪未校准 | 启动时的陀螺仪校准失败 | 重启飞控并保持静止直到校准完成 |
| Gyros not healthy | 陀螺仪状态异常 | 至少一个陀螺仪未提供有效数据 | 重启飞控,若仍失败请更换飞控 |
| Hardware safety switch | 硬件安全开关未按下 | 未按下硬件安全开关 | 按下安全开关(通常在 GPS 上方)或将 BRD_SAFETY_DEFLT 设置为 0 并重启飞控 |
| heater temp low (x < 45) | 加热板温度低于设定值 | 板载加热器温度低于目标值 | 等待主板升温,可通过 BRD_HEAT_TARG 参数调整目标温度 |
| In OSD menu | 正在配置 OSD 菜单 | 正在配置 OSD 系统 | 完成 OSD 配置,检查相关设置 |
| Internal errors 0x%x l:%u %s | 发生内部错误 | 飞控发生了内部错误 | 重启飞控,并将错误信息反馈给开发团队 |
| Invalid FENCE_ALT_MAX value | FENCE_ALT_MAX 值无效 | 最大高度必须为正值 | 增加 FENCE_ALT_MAX 的值 |
| Invalid FENCE_ALT_MIN value | FENCE_ALT_MIN 值无效 | 最小高度必须大于 -100 | 增加 FENCE_ALT_MIN 的值 |
| Invalid FENCE_MARGIN value | FENCE_MARGIN 值无效 | 安全边距必须为正值 | 增加 FENCE_MARGIN 的值 |
| Invalid FENCE_RADIUS value | FENCE_RADIUS 值无效 | 围栏半径必须为正值 | 增加 FENCE_RADIUS 的值 |
| Logging failed | 日志写入失败 | 日志无法写入,可能为硬件故障 | 重启飞控。如问题仍存在,请更换飞控 |
| Logging not started | 日志未开始记录 | 日志未能写入,可能为硬件问题 | 重启飞控。如问题仍存在,请更换飞控 |
| Main loop slow (xHz < 400Hz) | 主循环速率过慢(xHz < 400Hz) | 飞控 CPU 处理过载 | 等待是否为临时现象,或禁用部分功能、更换高性能飞控,降低 SCHED_LOOP_RATE |
| Margin is less than inclusion circle radius | 电子围栏边距小于圆形围栏半径 | 圆形围栏半径小于边距 | 增大围栏半径或减小 FENCE_MARGIN |
| memory low for auxiliary authorisation | 辅助授权内存不足 | 飞控内存耗尽 | 禁用功能或更换更高性能飞控 |
| Missing mission item: do land start | 任务缺少 DO_LAND_START | 自动任务中缺少 DO_LAND_START 命令 | 添加 DO_LAND_START 命令或调整 ARMING_MIS_ITEMS 参数 |
| Missing mission item: land | 任务缺少 LAND 命令 | 自动任务中缺少 LAND 命令 | 添加 LAND 命令或调整 ARMING_MIS_ITEMS 参数 |
| Missing mission item: RTL | 任务缺少 RTL 命令 | 自动任务中缺少 RTL 命令 | 添加 RTL 命令或调整 ARMING_MIS_ITEMS 参数 |
| Missing mission item: takeoff | 任务缺少 TAKEOFF 命令 | 自动任务中缺少 TAKEOFF 命令 | 添加 TAKEOFF 命令或调整 ARMING_MIS_ITEMS 参数 |
| Missing mission item: vtol land | 任务缺少 VTOL_LAND 命令 | 自动任务中缺少 VTOL_LAND 命令 | 添加 VTOL_LAND 命令或调整 ARMING_MIS_ITEMS 参数 |
| Missing mission item: vtol takeoff | 任务缺少 VTOL_TAKEOFF 命令 | 自动任务中缺少 VTOL_TAKEOFF 命令 | 添加 VTOL_TAKEOFF 命令或调整 ARMING_MIS_ITEMS 参数 |
| Mode channel and RCx_OPTION conflict | 飞行模式通道与辅助功能冲突 | 飞行模式开关与辅助功能开关共用同一通道 | 更改 FLTMODE_CH(或 MODE_CH)或 RCx_OPTION 以消除冲突 |
| Mode requires mission | 当前飞行模式需要任务 | 尝试在自动模式下解锁但没有任务 | 使用其他模式解锁,或创建上传自动任务 |
| Motors Emergency Stopped | 电机已紧急停止 | 电机因紧急情况停止 | 释放紧急停止,检查辅助功能设置 |
| Mount: check TYPE | 云台类型配置错误 | 云台类型配置错误 | 检查 MNT1_TYPE 是否正确,确认云台配置 |
| Mount: not healthy | 云台状态异常 | 云台未与飞控通信 | 检查飞控与云台的物理连接,并确认云台参数设置 |
| Multiple SERIAL ports configured for RC input | 多个串口被配置为接收遥控信号 | 遥控配置错误 | 请参考遥控接收机配置文档 |
| No mission library present | 任务功能库缺失 | 自动任务功能已被禁用 | 该固件可能使用定制编译服务,未包含自动任务功能,请重新编译以启用 |
| No rally library present | 集结点功能库缺失 | 集结点功能已被禁用 | 该固件可能使用定制编译服务,未包含集结点功能,请重新编译以启用 |
| No SD card | 未检测到 SD 卡 | SD 卡损坏或未插入 | 格式化或更换 SD 卡 |
| No sufficiently close rally point located | 附近未找到集结点 | 集结点距离超出 RALLY_LIMIT_KM | 将集结点移近当前位置或提高 RALLY_LIMIT_KM 参数 |
| OA requires reboot | 避障配置更改,需重启 | 避障参数已更改 | 重启飞控 |
| OpenDroneID: ARM_STATUS not available | OpenDroneID 未提供 ARM_STATUS | OpenDroneID 配置错误 | 参考远程 ID 配置文档 |
| OpenDroneID: operator location must be set | OpenDroneID 操作员位置未设定 | 操作员位置信息缺失 | 参考远程 ID 配置文档 |
| OpenDroneID: SYSTEM not available | OpenDroneID 系统信息不可用 | OpenDroneID 配置错误 | 参考远程 ID 配置文档 |
| OpenDroneID: UA_TYPE required in BasicID | OpenDroneID 未设置 UA_TYPE | OpenDroneID 配置错误 | 参考远程 ID 配置文档 |
| OSD_TYPE2 not compatible with first OSD | OSD1 与 OSD2 配置不兼容 | OSD 显示器配置冲突 | 禁用第二个 OSD(将 OSD_TYPE2 设置为 0)或检查配置 |
| Param storage failed | 参数存储失败 | EEPROM 存储器硬件故障 | 检查供电或更换飞控 |
| parameter storage full | 参数存储空间已满 | EEPROM 存储已满 | 保存当前参数,重置为默认值并重新加载参数 |
| PiccoloCAN: Servo x not detected | 未检测到 PiccoloCAN 舵机 x | PiccoloCAN 配置错误或舵机异常 | 检查 Currawong Velocity 电调设置说明 |
| Pin x disabled (ISR flood) | 引脚 x 被禁用(中断过载) | 连接到 GPIO 引脚的传感器变化过快 | 检查指定引脚所连接的传感器 |
| Pitch (RCx) is not neutral | 俯仰通道未居中 | 遥控器俯仰摇杆未归中 | 将俯仰摇杆归中或重新校准遥控器 |
| Pitch radio max too low | 俯仰最大值过低 | 俯仰通道最大值低于 1700 | 重新执行遥控器校准,或将 RC2_MAX 设置高于 1700 |
| Pitch radio min too high | 俯仰最小值过高 | 俯仰通道最小值高于 1300 | 重新执行遥控器校准,或将 RC2_MIN 设置低于 1300 |
| PRXx: No Data | 测距传感器无数据 | 接近传感器未提供数据 | 检查接近传感器的连接和配置 |
| PRXx: Not Connected | 测距传感器未连接 | 接近传感器未提供数据 | 检查接近传感器的连接和配置 |
| Radio failsafe on | 触发遥控器失控保护 | RC 失控保护已触发 | 打开遥控器或检查失控保护配置 |
| Rangefinder x: Not Connected | 测距仪 x 未连接 | 测距仪未提供数据 | 检查测距仪与飞控的连接和配置 |
| Rangefinder x: Not Detected | 测距仪 x 未检测到 | 测距仪未提供数据 | 检查测距仪与飞控的连接和配置 |
| RC calibrating | 遥控器正在校准中 | 遥控器校准正在进行中 | 完成遥控器校准流程 |
| RC not calibrated | 遥控器未校准 | 遥控器尚未完成校准 | 完成遥控器校准,RC3_MIN/MAX 必须改动,通道1~4范围应为 ≤1300 至 ≥1700 |
| RC not found | 未检测到遥控器信号 | 启用了 RC 失控保护但未检测到遥控信号 | 打开遥控器或检查与飞控的连接。 |
| RCx_MAX is less than RCx_TRIM | RCx_MAX 小于 RCx_TRIM | 遥控器配置错误 | 调整 RCx_TRIM 小于 RCx_MAX 或重新校准 |
| RCx_MIN is greater than RCx_TRIM | RCx_MIN 大于 RCx_TRIM | 遥控器配置错误 | 调整 RCx_TRIM 大于 RCx_MIN 或重新校准 |
| RELAYx_PIN=y invalid | RELAYx_PIN 设置无效 | 继电器配置错误 | RELAYx_PIN 设置了无效值,请检查继电器配置说明 |
| RELAYx_PIN=y, set SERVx_FUNCTION=-1 | 继电器配置错误,需关闭通道功能 | 继电器配置错误 | 将对应的 SERVOx_FUNCTION 设置为 -1 |
| RNGFNDx_PIN not set | 测距引脚未设置 | 测距仪配置错误 | 将 RNGFNDx_PIN 设置为非零值, |
| RNGFNDx_PIN=y invalid | 测距引脚值无效 | 测距仪配置错误 | RNGFNDx_PIN 设置无效,请检查测距仪配置 |
| RNGFNDx_PIN=y, set SERVOx_FUNCTION=-1 | 测距仪配置错误,需关闭通道功能 | 测距仪配置错误 | 将 SERVOx_FUNCTION 设置为 -1 |
| Roll (RCx) is not neutral | 横滚通道未居中 | 遥控器横滚摇杆未归中 | 将横滚摇杆归中或重新校准 |
| Roll radio max too low | 横滚最大值过低 | 横滚通道最大值低于 1700 | 重新校准或将 RC1_MAX 设置高于 1700 |
| Roll radio min too high | 横滚最小值过高 | 横滚通道最小值高于 1300 | 重新校准或将 RC1_MIN 设置低于 1300 |
| RPMx_PIN not set | RPM 引脚未设置 | RPM 传感器配置错误 | 检查 RPMx_PIN 值及传感器配置说明 |
| RPMx_PIN=y invalid | RPM 引脚值无效 | RPM 传感器配置错误 | RPMx_PIN 设置无效,请检查 RPM 配置 |
| RPMx_PIN=y, set SERVOx_FUNCTION=-1 | RPM 配置错误,需关闭通道功能 | RPM 传感器配置错误 | 将 SERVOz_FUNCTION 设置为 -1 |
| Same Node Id x set for multiple GPS | 多个 GPS 设置了相同 Node ID | DroneCAN GPS 配置错误 | 检查 GPS1_CAN_NODEID 与 GPS2_CAN_NODEID 是否不同,建议设一个为 0 并重启飞控 |
| Same rfnd on different CAN ports | 多个测距仪在不同 CAN 口重复 | 不同 CAN 口出现了重复的测距仪 | 检查 USD1、TOFSensP、NanoRadar 或 Benewake 设置说明 |
| Scripting: loaded CRC incorrect want: x | 脚本加载 CRC 校验失败 | 脚本 CRC 校验码错误 | 替换为期望版本的 Lua 脚本 |
| Scripting: running CRC incorrect want: x | 脚本运行时 CRC 校验失败 | 脚本 CRC 校验码错误 | 替换为期望版本的 Lua 脚本 |
| Scripting: xxx failed to start | Lua 脚本启动失败 | Lua 脚本启动失败,可能内存不足或配置错误 | 飞控内存不足或脚本配置有误,参考 Lua 脚本说明 |
| Scripting: xxx out of memory | Lua 脚本内存不足 | Lua 脚本超出可用内存 | 增加 SCR_HEAP_SIZE 或检查脚本配置 |
| Servo voltage to low (Xv < 4.3v) | 舵机供电电压过低 | 舵机轨电压低于 4.3V | 检查舵机供电电源 |
| SERVOx_FUNCTION=y on disabled channel | 禁用通道上配置了舵机功能 | PWM 输出配置错误 | 检查 BLHeli 配置,确保通道未被禁用 |
| SERVOx_MAX is less than SERVOx_TRIM | 舵机最大值小于中值 | PWM 输出配置错误 | 将 SERVOx_TRIM 设置小于 SERVOx_MAX |
| SERVOx_MIN is greater than SERVOx_TRIM | 舵机最小值大于中值 | PWM 输出配置错误 | 将 SERVOx_TRIM 设置大于 SERVOx_MIN |
| temperature cal running | 正在进行温度校准 | 飞控正在执行温度校准 | 等待温度校准完成或重启飞控 |
| terrain disabled | 地形数据功能未启用 | 自动任务使用地形高度,但地形数据库未启用 | 启用 TERRAIN_ENABLE 参数,或移除地形高度相关任务项 |
| Terrain out of memory | 地形数据超出内存限制 | 飞控内存不足 | 禁用部分功能或更换高性能飞控 |
| Throttle (RCx) is not neutral | 油门通道未归零 | 遥控器油门未归零 | 将油门杆归零或重新校准 |
| Throttle radio max too low | 油门最大值过低 | 油门最大值低于 1700 | 重新校准或将 RC2_MAX 设置高于 1700 |
| Throttle radio min too high | 油门最小值过高 | 油门最小值高于 1300 | 重新校准或将 RC1_MIN 设置低于 1300 |
| Too many auxiliary authorisers | 辅助授权设备数量过多 | 超过 3 个外部系统控制解锁 | 检查辅助授权系统 |
| vehicle outside fence | 飞行器已飞出电子围栏 | 飞行器不在围栏范围内 | 将飞行器移回围栏内 |
| VisOdom: not healthy | 视觉里程计状态异常 | 视觉里程计传感器未提供数据 | 检查视觉里程计的物理连接和配置 |
| VisOdom: out of memory | 视觉里程计内存不足 | 飞控内存耗尽 | 禁用部分功能或更换更高性能飞控 |
| VTOL Fwd Throttle iz not zero | VTOL 前向油门未归零 | 遥控器 VTOL 前向油门未归零 | 将前向油门归零或重新校准 |
| waiting for terrain data | 等待地面站发送地形数据 | 等待地面站提供地形数据 | 等待或移动至 GPS 信号更强的位置 |
| Yaw (RCx) is not neutral | 偏航通道未归中 | 遥控器偏航摇杆未归中 | 将偏航摇杆归中或重新校准 |
| Yaw radio max too low | 偏航最大值过低 | 偏航最大值低于 1700 | 重新校准或将 RC2_MAX 设置高于 1700 |
| Yaw radio min too high | 偏航最小值过高 | 偏航最小值高于 1300 | 重新校准或将 RC1_MIN 设置低于 1300 |
3.2 仅限多旋翼 / 直升机机型
| Message | 消息(中文) | 原因 | 解决方法 |
|---|---|---|---|
| ADSB threat detected | 检测到 ADS-B 威胁 | ADSB 失控保护触发,附近有人驾驶飞行器 | 查看 ADS-B 配置 |
| AHRS not healthy | AHRS 状态异常 | AHRS 或 EKF 尚未准备就绪 | 等待 EKF 稳定或重启飞控 |
| Altitude disparity | 高度估算不一致 | 气压计与 EKF 的高度估算相差超过 1 米 | 等待 EKF 稳定或重启飞控 |
| Auto mode not armable | 自动模式下无法解锁 | 在 Auto 模式下无法解锁 | 切换至其他模式(如 Loiter)或设置 RTL_OPTIONS = 3 |
| Bad parameter: ATC_ANG_PIT_P must be > 0 | 参数错误:ATC_ANG_PIT_P 必须大于 0 | 姿态控制器参数配置错误 | 将指定参数设置为大于 0 |
| Bad parameter: PSC_POSXY_P must be > 0 | 参数错误:PSC_POSXY_P 必须大于 0 | 位置控制器参数配置错误 | 将指定参数设置为大于 0 |
| Battery failsafe | 电池失控保护触发 | 电池电压/容量触发失控保护 | 插入电池并检查电压容量 |
| Check ACRO_BAL_ROLL/PITCH | 检查 ACRO_BAL_ROLL/PITCH | ACRO 平衡参数过高 | 将 ACRO 参数调低至姿态比例值以下, |
| Check ANGLE_MAX | 检查 ANGLE_MAX | 最大倾角设置过大 | 将 ANGLE_MAX 降至 8000(约 80°)或更低 |
| Check FS_THR_VALUE | 检查 FS_THR_VALUE | 遥控失控保护参数配置错误 | 设置 FS_THR_VALUE 在 910 与 RC 油门最小值之间 |
| Check PILOT_SPEED_UP | 检查 PILOT_SPEED_UP | 上升速度设置过低 | 将该参数设置为正数,如 100 表示 1 米每秒 |
| Collective below failsafe (TradHeli only) | 集体俯仰低于失控阈值(仅限直升机) | RC 集体俯仰输入低于失控保护值 | 打开遥控器,检查 FS_THR_VALUE 与失控保护配置 |
| EKF attitude is bad | EKF 姿态估算异常 | EKF 无法提供可靠姿态 | 等待 EKF 稳定,或重启、更换飞控 |
| EKF compass variance | EKF 磁罗盘方向异常 | 磁力计方向异常 | 远离金属环境、重新校准、可禁用内置磁力计 |
| EKF height variance | EKF 高度估算波动 | 气压计数值不稳定或震动过大 | 等待、测量震动、增加减震结构 |
| EKF position variance | EKF 位置估算波动 | GPS 位置不稳定 | 等待、移至户外、排除干扰源 |
| EKF velocity variance | EKF 速度估算波动 | GPS 或光流速度估算不稳定 | 检查 GPS/光流传感器、移至户外 |
| Fence enabled, need position estimate | 启用电子围栏但无位置信息 | 围栏功能需 GPS 数据 | 移至户外、确认 GPS、罗盘与加速度计校准 |
| FS_GCS_ENABLE=2 removed, see FS_OPTIONS | FS_GCS_ENABLE=2 已废弃 | 地面站失控保护配置错误 | 设置 FS_GCS_ENABLE=1 并检查 FS_OPTIONS |
| GCS failsafe on | 地面站失控保护触发 | 失去 GCS 通信 | 检查遥测连接 |
| GPS glitching | GPS 跳变异常 | GPS 定位异常跳变 | 移至空旷地带,排除干扰源 |
| High GPS HDOP | GPS 水平精度过低 | HDOP 值过高 | 等待改善或更换区域 |
| Home too far from EKF origin | Home 点与 EKF 原点相距太远 | 超过 50 公里 | 重启飞控重置 EKF 原点 |
| Interlock/E-Stop Conflict (TradHeli only) | 直升机互锁 / 急停功能冲突 | 辅助开关配置冲突 | 移除互锁或急停功能开关 |
| Invalid MultiCopter FRAME_CLASS | 多旋翼 FRAME_CLASS 设置错误 | 固件与 FRAME_CLASS 不匹配 | 更换固件或调整 FRAME_CLASS |
| Inverted flight option not supported | 不支持倒飞功能 | 辅助开关配置了不支持的倒飞 | 移除倒飞辅助开关 |
| Leaning | 飞行器倾斜过大 | 飞行器倾斜超过 ANGLE_MAX 限制 | 将飞行器放平 |
| Motor Interlock Enabled | 电机互锁已启用 | 电机互锁开关未置于低位 | 将互锁开关拨至低位 |
| Motor Interlock not configured | 未配置电机互锁 | 直升机机型需配置互锁功能 | 启用互锁辅助功能开关 |
| Motors: Check frame class and type | 电机:机架类型错误 | 机架类型未知或配置错误 | 输入有效的 frame_class 或 frame_type |
| Motors: Check MOT_PWM_MIN and MOT_PWM_MAX | 电机 PWM 最小/最大值配置错误 | PWM 范围配置错误 | 设置为 1000/2000 并重新校准电调 |
| Motors: MOT_SPIN_ARM > MOT_SPIN_MIN | 启动转速高于最小转速 | 启动转速设定过高或最小转速过低 | 将启动转速设为小于最小转速 |
| Motors: MOT_SPIN_MIN too high x > 0.3 | 最小电机转速过高 | 最小电机转速参数超过 0.3 | 将其调低至 0.3 以下 |
| Motors: no SERVOx_FUNCTION set to MotorX | 电机通道未正确分配 | 未配置电机输出通道 | 检查 SERVOx_FUNCTION 是否正确分配为 MotorX |
| Need Alt Estimate | 缺少高度估算 | EKF 尚未完成高度估算 | 等待 EKF 完成或重启飞控并确认加速度计校准 |
| Need Position Estimate | 缺少位置估算 | EKF 尚未提供位置估算 | 等待 EKF,或完成罗盘/加速度计校准 |
| Proximity x deg, ym (want > Zm) | 障碍物距离过近 | 飞行器附近有障碍物 | 移除障碍物或检查接近传感器配置 |
| RTL mode not armable | RTL 模式无法解锁 | 飞行器在 RTL 模式下无法解锁 | 切换至其他飞行模式 |
| RTL_ALT_TYPE is above-terrain but no rangefinder | RTL 依赖测距仪但未配置 | RTL 模式使用测距高度但测距仪无效 | 检查测距仪配置 |
| RTL_ALT_TYPE is above-terrain but no terrain data | RTL 依赖地形但未启用地形数据库 | 未启用地形功能 | 设置 TERRAIN_ENABLE = 1 启用地形 |
| RTL_ALT_TYPE is above-terrain but RTL_ALT>RNGFND_MAX | RTL 高度高于测距仪范围 | RTL 返回高度超过测距仪上限 | 将 RTL_ALT 设置低于测距仪最大值 |
| Safety Switch | 硬件安全开关未按下 | 未按下安全开关 | 按下安全开关或将 BRD_SAFETY_DEFLT 设为 0 |
| Throttle below failsafe | 油门低于失控阈值 | 遥控器油门低于 FS_THR_VALUE | 开启遥控器或检查失控值配置 |
| Vehicle too far from EKF origin | 飞行器距离 EKF 原点太远 | 当前位置距离 EKF 原点超过 50 公里 | 重启飞控以重设 EKF 原点 |
| winch unhealthy | 吊舱状态异常 | 吊舱未能与飞控通信 | 检查吊舱连接与配置 |
四、其他预解锁失败信息
4.1 失控保护(Failsafes)
任何失控保护(如遥控器、锂电池、地面站等)触发时,都会显示警告信息,并阻止飞控解锁。
4.2 气压计故障(Barometer failures):
- Baro not healthy(气压计状态异常) 气压计报告为不健康状态,通常表示其硬件存在故障。
- Alt disparity(高度差异) 气压计高度与惯性导航系统(即气压计 + 加速度计)的估算高度相差超过 1 米。 此类提示通常是短暂的,可能出现在飞控刚上电或飞控受到剧烈震动(如掉落)时。 若该提示持续存在,可能需要重新校准加速度计,或可能是气压计硬件问题。
4.3 指南针故障(Compass failures):
Compass not healthy(指南针状态异常) 指南针传感器报告为不健康状态,通常为硬件故障所致。
Compass not calibrated(指南针未校准) 指南针尚未进行校准,或校准参数为零,或者连接的指南针数量或型号在上次校准后发生了变化(涉及参数:COMPASS_OFS_X, Y, Z)。
Compass offsets too high(指南针偏移值过高) 主用指南针的偏移量(即 √(x²+y²+z²))大于 500,通常是由于金属物体过于靠近指南针导致。 如果你只使用了内置指南针(不推荐),这可能是飞控板内部金属结构引起的,这种情况下也可能不会真正影响飞行。你可以考虑禁用偏移检查。
Check mag field(磁场异常) 此提示可能由两种磁场检测失败引起:
- 实测磁场强度与理论值偏差超过 35%(预期值约为 530,判断区间为 <185 或 >874)。
- 获取 GPS 定位后,系统会基于世界地磁模型进行更严格的对比校验。
- 如果提示持续存在: 可能是指南针校准不佳,应重新校准; 或飞行器靠近大型金属体或强磁场,应改变位置。
Compasses inconsistent(多个指南针方向不一致) 内外部指南针方向相差超过 45°。通常是由于外部指南针的安装方向参数(COMPASS_ORIENT)设置错误引起。
4.4 GPS 相关故障(GPS related failures):
GPS Glitch(GPS 跳变) GPS 信号异常跳变,且当前飞行模式需要 GPS(如 Loiter、PosHold)或启用了圆柱电子围栏。
Need 3D Fix(未获得三维定位) GPS 未获得三维定位(即缺乏经纬度 + 高度信息),但飞行模式或围栏功能需要 GPS。
Bad Velocity(速度异常) 根据惯性导航系统判断,飞行器速度超过 50cm/s。 可能原因包括:飞行器实际移动、掉落、加速度计校准不佳,或 GPS 更新频率低于标准 5Hz。
High GPS HDOP(GPS 水平精度过差) GPS 的 HDOP 值(水平位置精度指标)超过 2.0,且当前模式或围栏依赖 GPS。 解决办法包括:
- 等待几分钟; 移动飞行器至视野更开阔的位置;
- 检查是否有 GPS 干扰源(如 FPV 图传)并远离;
- 可适当放宽检测限制,例如将 GPS_HDOP_GOOD 设置为 2.2 或 2.5;
4.5 INS 检查(惯性导航系统:加速度计和陀螺仪)
- INS not calibrated(惯导未校准) 一些或全部加速度计的偏移量为零,说明尚未进行加速度计校准。
- Accels not healthy(加速度计状态异常) 至少一个加速度计报告不健康,可能是硬件故障。也可能是在固件更新后尚未重启飞控时出现。
- Accels inconsistent(加速度计数据不一致) 加速度计报告的加速度值彼此差异超过 1 m/s²,说明需要重新校准,或传感器硬件故障。
- Gyros not healthy(陀螺仪状态异常) 至少一个陀螺仪报告不健康,可能为硬件故障,也可能是更新固件后尚未重启飞控。
- Gyro cal failed(陀螺仪校准失败) 在校准过程中未能正确捕获偏移量,通常是飞行器在红蓝灯闪烁时被移动所致。断电再上电并保持静止通常可解决;也可能是硬件故障造成的信号干扰。
- Gyros inconsistent(陀螺仪数据不一致) 两个陀螺仪报告的旋转速率差异超过 20°/秒,可能是校准问题或硬件损坏。
4.6 板载电压检查(Board Voltage)
- Check Board Voltage(检查主板电压) 主板内部电压低于 4.3V 或高于 5.8V。 若通过 USB 上电:可能是电脑供电电流不足,建议更换 USB 线或端口。 若通过电池上电:则属于严重问题,应检查电源模块、电池等供电系统后再飞行。
4.7 参数检查(Parameter Checks)
- Ch7 & Ch8 Opt cannot be same(通道功能重复) 辅助通道 Ch7 和 Ch8 被设置为相同功能,这是不允许的,可能导致功能混淆。
- Check FS_THR_VALUE(检查失控保护油门阈值) 设置的遥控失控保护值(PWM)与通道 3(油门)的最小值过于接近。
- Check ANGLE_MAX(最大倾角设置不合理) 控制最大倾角的 ANGLE_MAX 参数被设置得过低(小于 1000,即10°)或过高(大于 8000,即80°)。
- ACRO_BAL_ROLL/PITCH(ACRO 模式稳定参数过大) ACRO_BAL_ROLL 或 ACRO_BAL_PITCH 参数值大于 Stabilize 模式对应的角速度 P 值,这会导致飞手在 ACRO 模式中无法有效控制姿态。
4.8 电池 / 电源监测(Battery / Power Monitor)
- 当电压或剩余容量低于设置的失控保护低电压或临界阈值时,该检查项将失败。 如果这些阈值设置颠倒(如临界值高于低电压值),也会失败。
- 此外,还可以设置最低解锁电压与容量,例如: BATT_ARM_VOLT(最低解锁电压) BATT_ARM_MAH(最低解锁容量) 用于确保电池不仅未触发 failsafe,还具备足够容量以支持飞行。
4.9 空速计(Airspeed)
- Airspeed not healthy(空速计状态异常) 若已配置空速传感器,但其未能提供有效数据或校准失败,则此项检查会失败。
4.10 日志记录(Logging)
- Logging failed(日志写入失败) 启用了解锁前日志功能(Pre-arm Logging),但未能写入日志。
- No SD Card(未检测到 SD 卡) 启用了日志记录功能,但飞控未检测到 SD 卡。
4.11 安全开关(Safety Switch)
- Hardware safety switch(硬件安全开关未按下) 飞控启用了硬件安全开关,但用户未按下按钮,导致无法解锁。
4.12 系统故障(System)
- Param storage failed(参数存储故障) 飞控在读取 EEPROM 参数存储区域时失败,可能为硬件问题。
- Internal errors (0xx)(内部错误) 飞控发生内部系统错误,请将错误信息报告给 ArduPilot 开发团队。
- KDECAN Failed : KDECAN 系统故障。
- DroneCAN Failed : DroneCAN 系统故障。
4.13 任务相关(Mission)
- ARMING_MIS_ITEMS 检查失败 启用了任务内容检查功能但检查未通过。
- No mission library present(任务库缺失) 启用了任务检查,但未加载任务。
- No rally library present(集结点库缺失) 启用了集结点检查,但未设置任何集结点。
- Missing mission item: xxxx(任务项缺失) 任务中缺少必要的指令项(如 Takeoff、RTL、Land 等)。
4.14 测距仪(Rangefinder)
如果已配置测距仪,但其报告错误或未能正常工作,将导致解锁前检查失败。
- 在最差情况下,可先在不依赖 GPS 的模式(如 Stabilize、AltHold)下解锁起飞,再切换至 Loiter,但不推荐使用此方法。
禁用解锁前安全检查
警告: 不建议禁用解锁前安全检查。在条件允许的情况下,应在飞行器起飞前解决导致解锁前检查失败的问题。
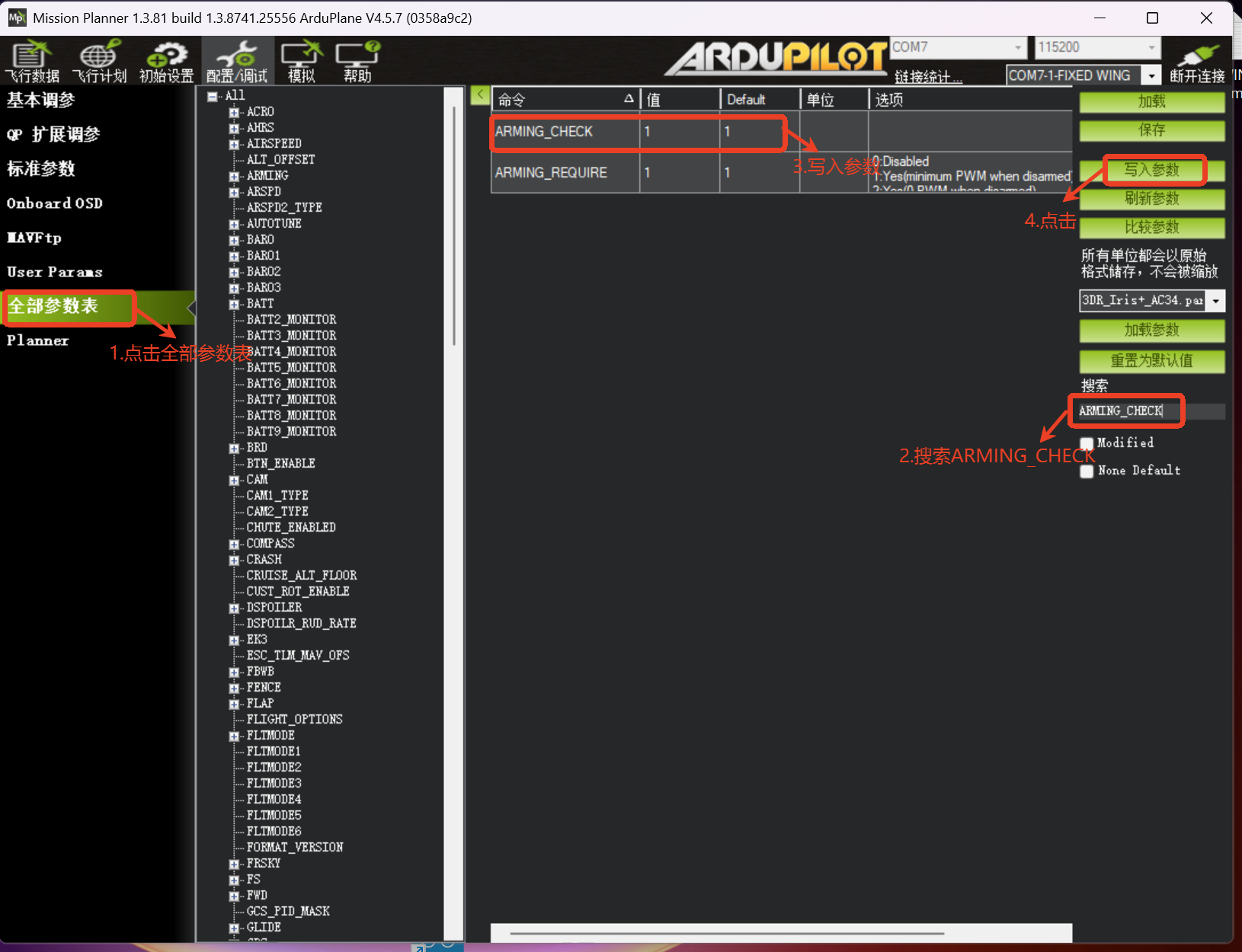
如果你确认解锁前的失败提示并不是实际问题,可以选择禁用对应的检查项。可以通过将参数 ARMING_CHECK 设置为 非 1 的数值,单独禁用某些检查。 将其设置为0 将完全禁用所有解锁前检查。
——本文引用至ArduPilot官网: https://ardupilot.org/copter/docs/common-prearm-safety-checks.html