如何设置返航
2025/5/22大约 2 分钟
一、原理
返航模式(Return to Launch,简称 RTL)是 ArduPilot 固件的一项重要安全功能。当无人机进入 RTL 模式后,飞控会自动导航至起飞点,并按照预设参数降落或盘旋等待。返航模式通常由遥控器的拨杆开关或飞控的失控保护(Failsafe)触发。
返航模式的核心功能:
- 自主返航:当信号丢失或手动触发时,飞机会自动返回起飞点。
- 高度控制:可以设置返航时的飞行高度,避免碰撞障碍物。
- 盘旋:可以设定飞机在到达起飞点后执行盘旋等待指令。
适用场景:
- 信号丢失时的自动安全保护
- 测试过程中快速返回起飞点
- 长距离飞行后的自动归航
二、设备准备
1)飞控: SpeedyBee F405 WING APP/ SpeedyBee F405 WING MINI/ SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)地面站: Mission Planner 地面站。
三、具体操作
1.遥控器设置
- 选择一个 两段位开关
- 导航至 MDL/MIXES 页面,将其混控配置为 CH6(可按实际情况进行设置,仅供参考)

2.启用返航拨杆设置
- 进入 配置/调试
- 进入 全部参数表
- 搜索 RC6_OPTION
- 将RC6_OPTION的值 设置为4
- 点击 写入参数

3.返航参数设置
- 进入 配置/调试
- 进入 全部参数表
- 搜索 RTL
- 修改以下参数
- 点击 写入参数
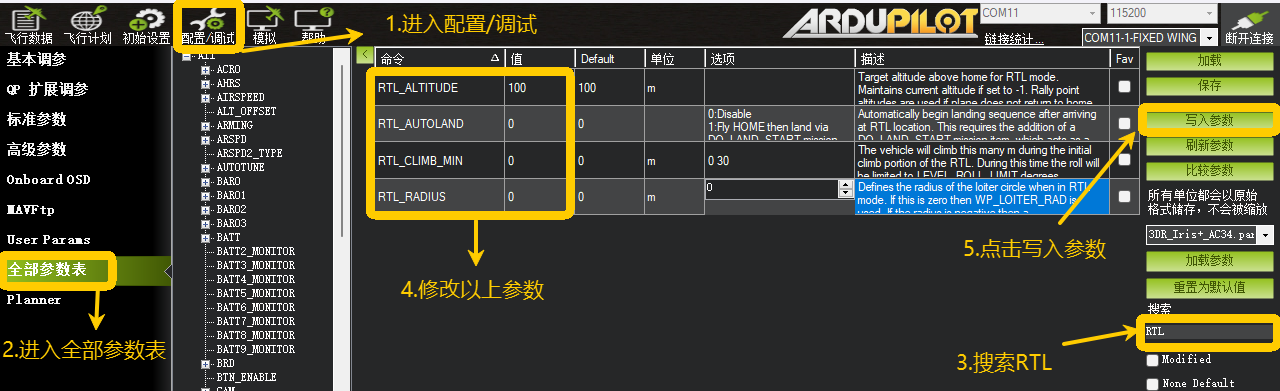
| 参数 | 值 | 描述 |
|---|---|---|
| RTL_ALTITUDE | 100 | 返航高度,默认100,建议100 |
| RTL_AUTOLAND | 0 | 返航后自动降落,建议禁用 |
| RTL_CLIMB_MIN | 0 | 返航爬升最小值 |
| RTL_RADIUS | 0 | 返航盘旋半径,若设置为0,则与航点盘旋半径一致 |
四、Q&A
技术支持二维码
