如何设置TBS高频头
一、原理
TBS 高频头(Crossfire)支持 MAVLink 数传 功能,可通过 遥控器、接收机 以及 WiFi 方式 实现飞控与地面站(Mission Planner / QGroundControl)的无线通信。正确配置 TBS 高频头数传功能后,可远程进行飞行数据监控、参数调整、航点设置等操作。
二、设备准备
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)遥控器: 以 RadioMaster Boxer 为例。
3)TBS 高频头(Crossfire TX): Micro TX / Nano TX / Fusion。
4)TBS 接收机(Crossfire RX): Nano RX PRO(推荐)。
5)地面站:Mission Planner 地面站。
三、具体操作
3.1 TBS RX(接收机)与飞控数传接口连接
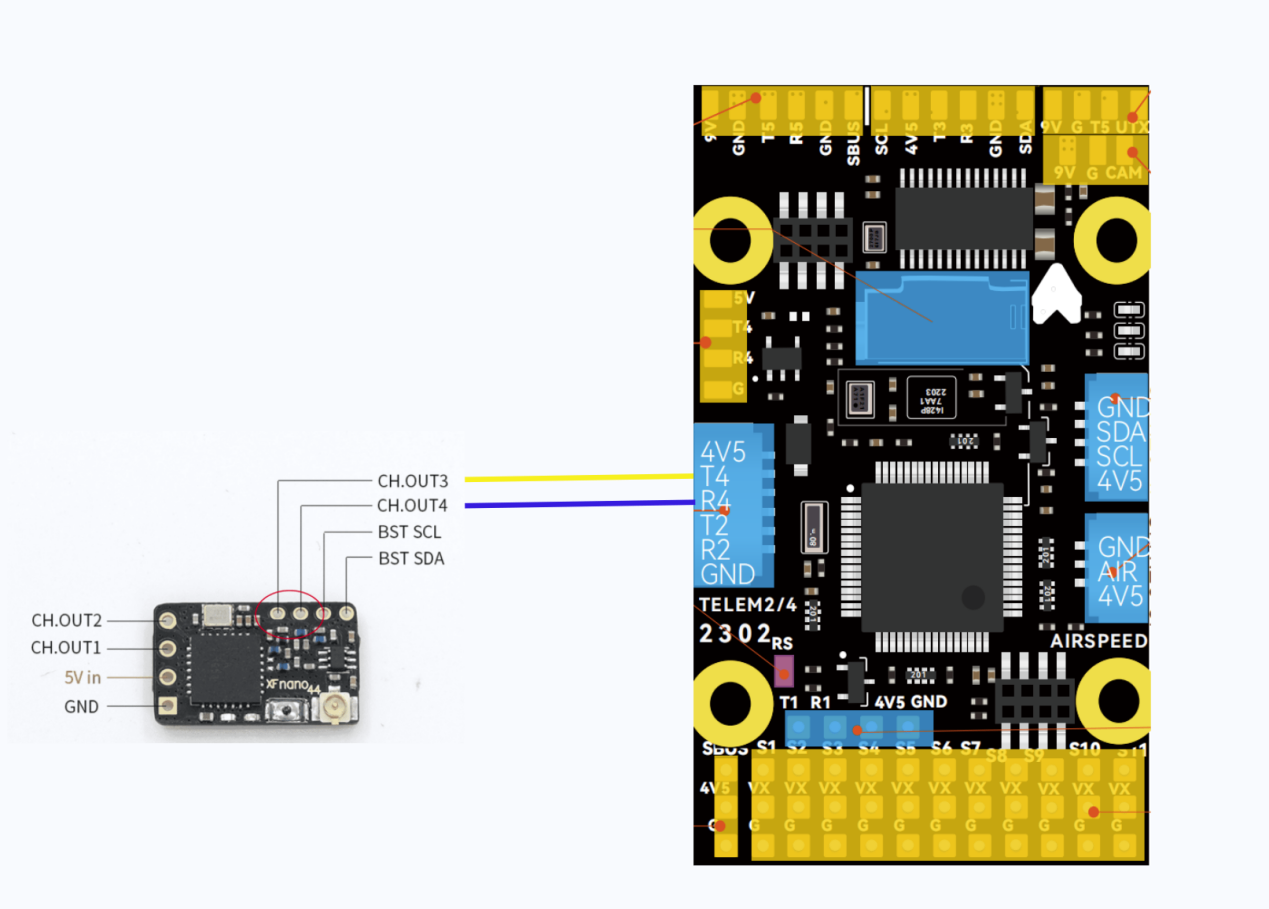
将 TBS Nano RX(或 PRO 版)的 CH.OUT3 和 CH.OUT4 分别连接至飞控的 UART4(Serial4) 端口:
| TBS RX 接口 | 飞控端口 | 说明 |
|---|---|---|
| OUT3 | TX4 | MAVLink 数据发送 |
| OUT4 | RX4 | MAVLink 数据接收 |
3.2 TBS 遥控器设置
3.2.1 进入 TBS Agent Lite 脚本
- 上电飞机,打开遥控器。
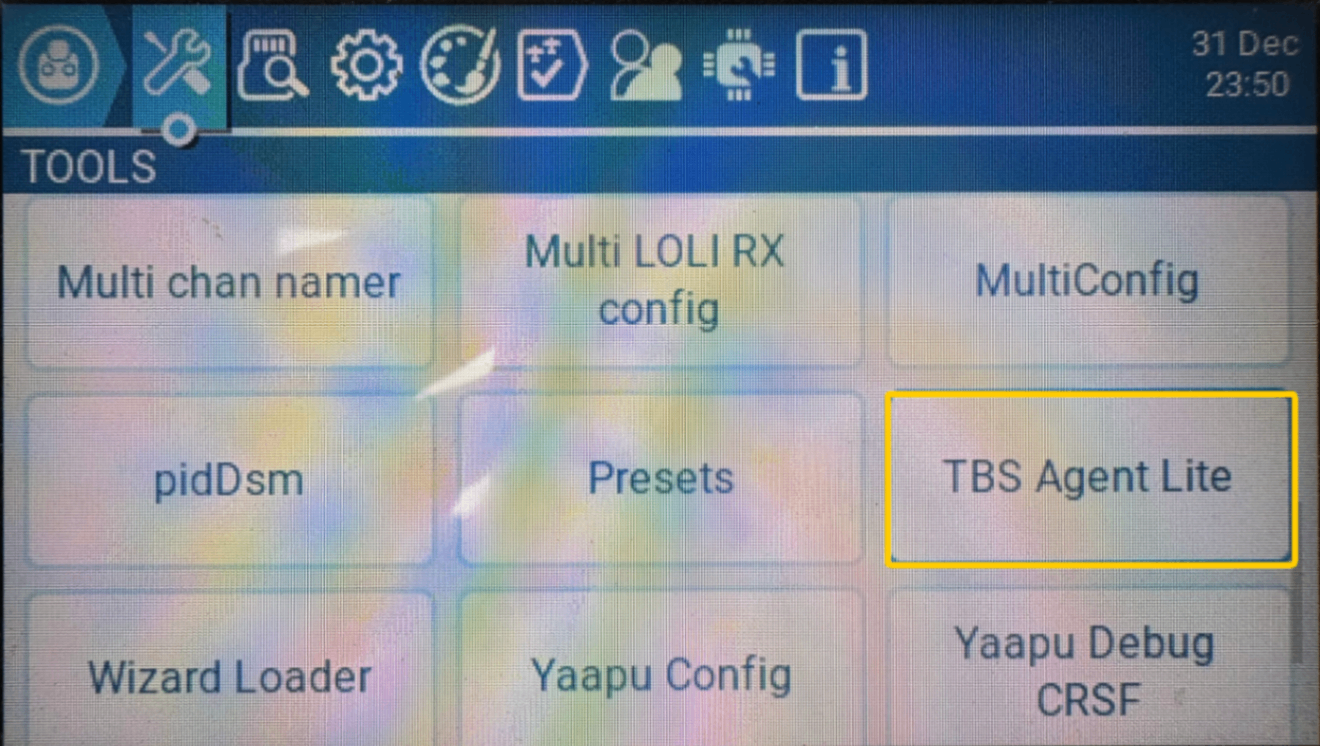
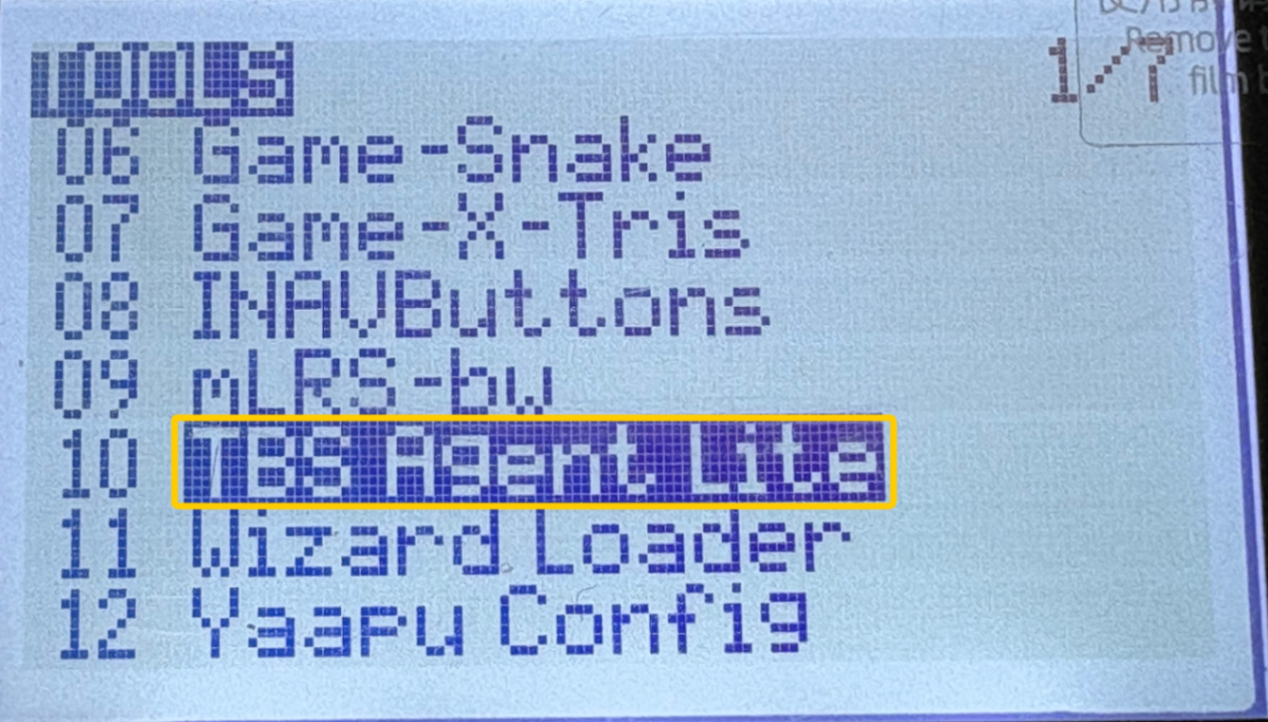
- 进入 SYS(系统)界面,打开 TBS Agent Lite 脚本。
彩色屏幕:
黑白屏幕:
3.2.2 设置接收机 MAVLink 输出
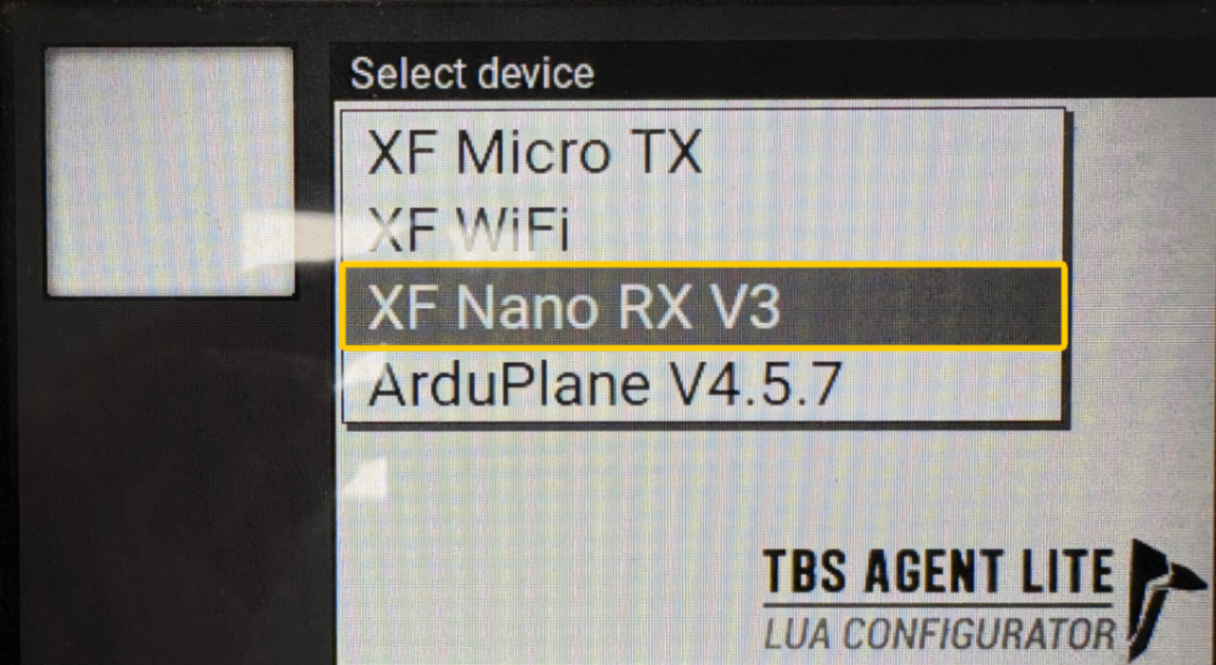
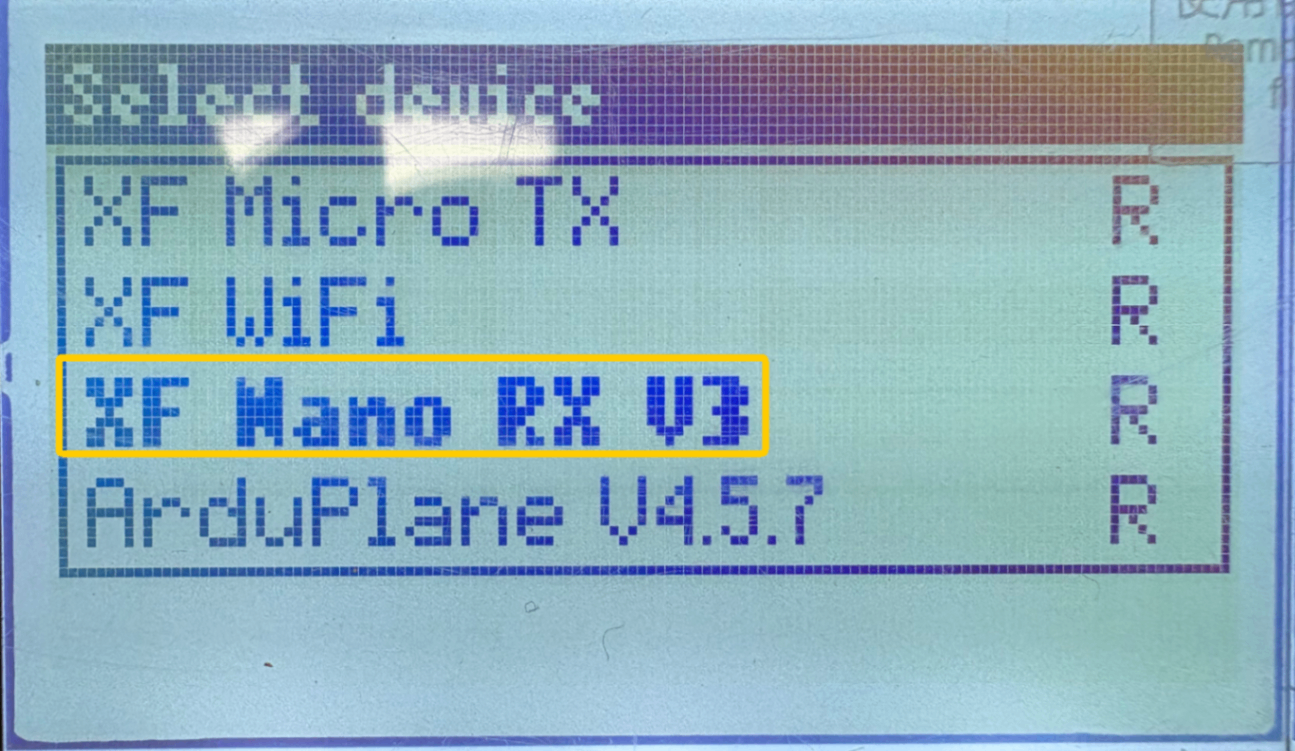
- 选择 XF Nano RX。 如果未显示,需更新高频头或接收机固件。
彩色屏幕:
黑白屏幕:
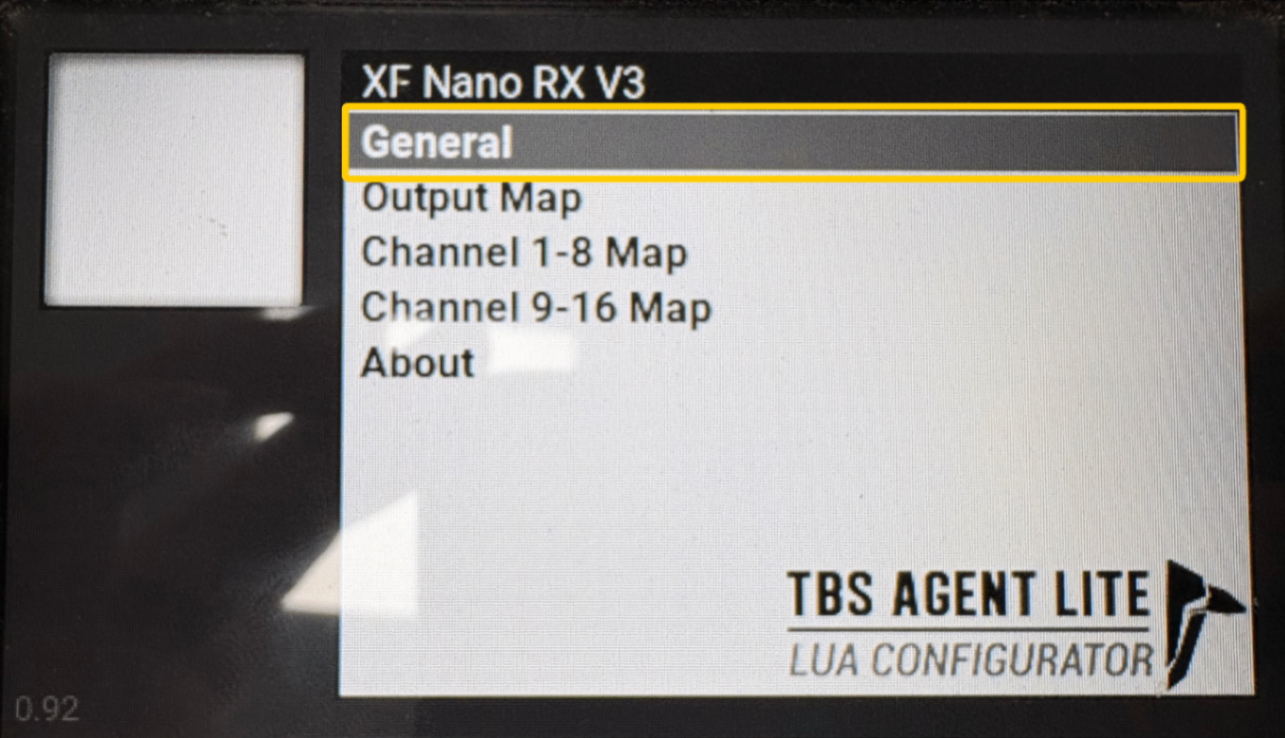
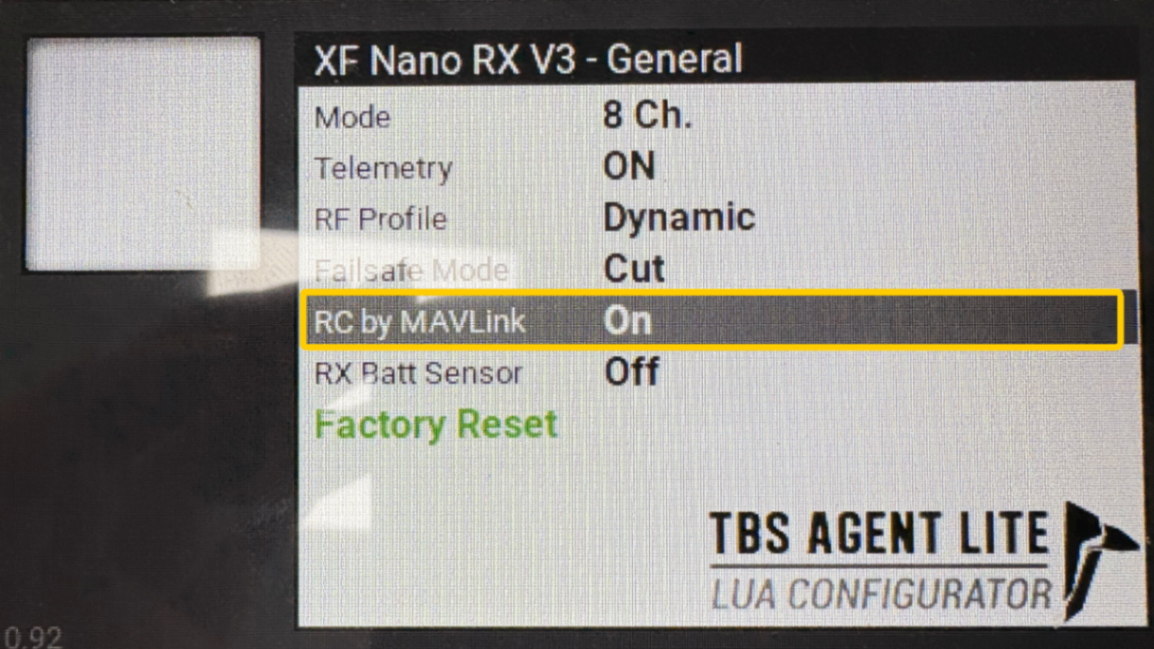
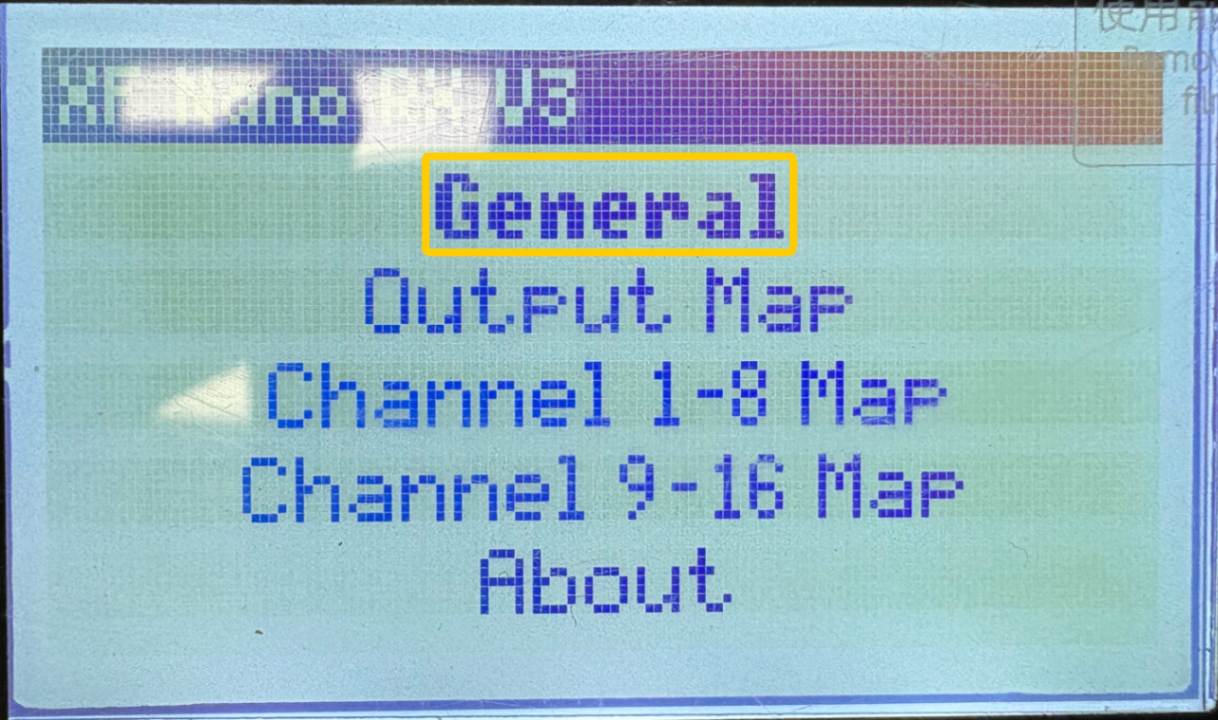
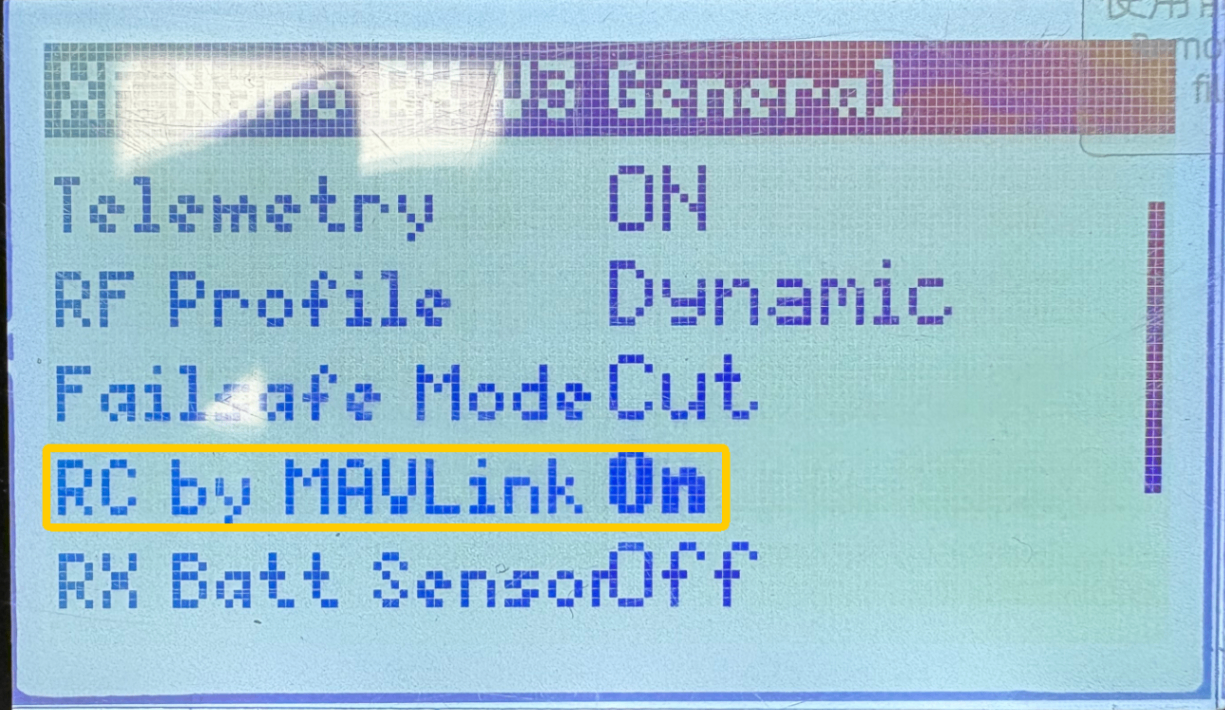
- 进入 General,将 RC by MAVLink 设为 On。
彩色屏幕:
黑白屏幕:
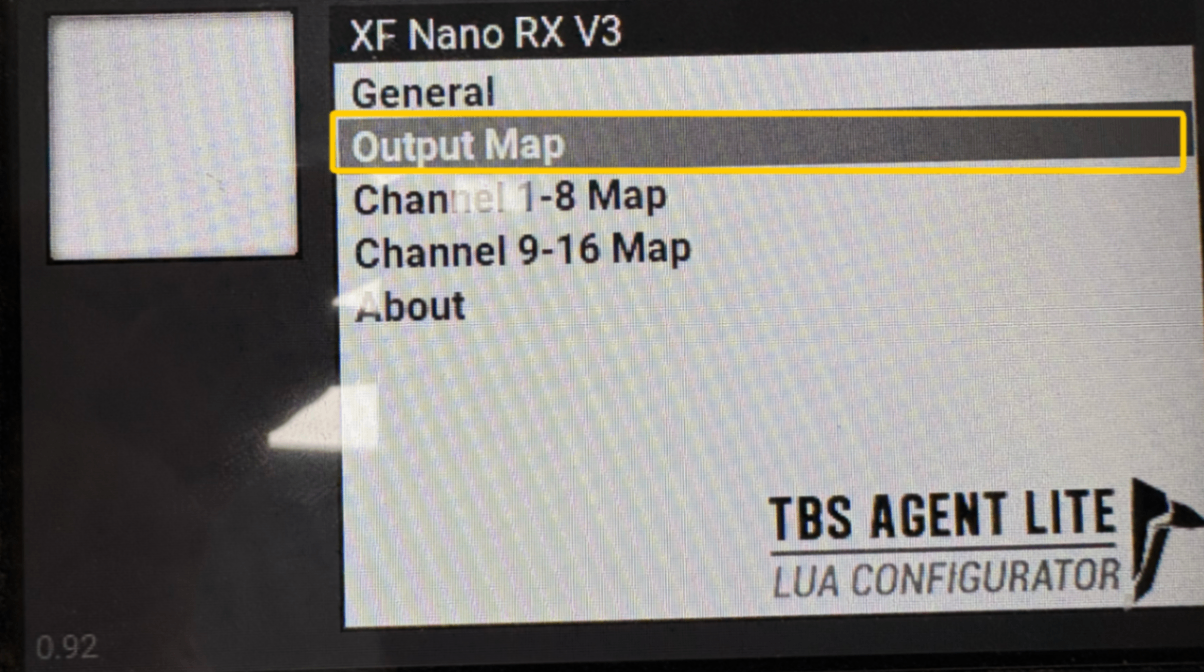
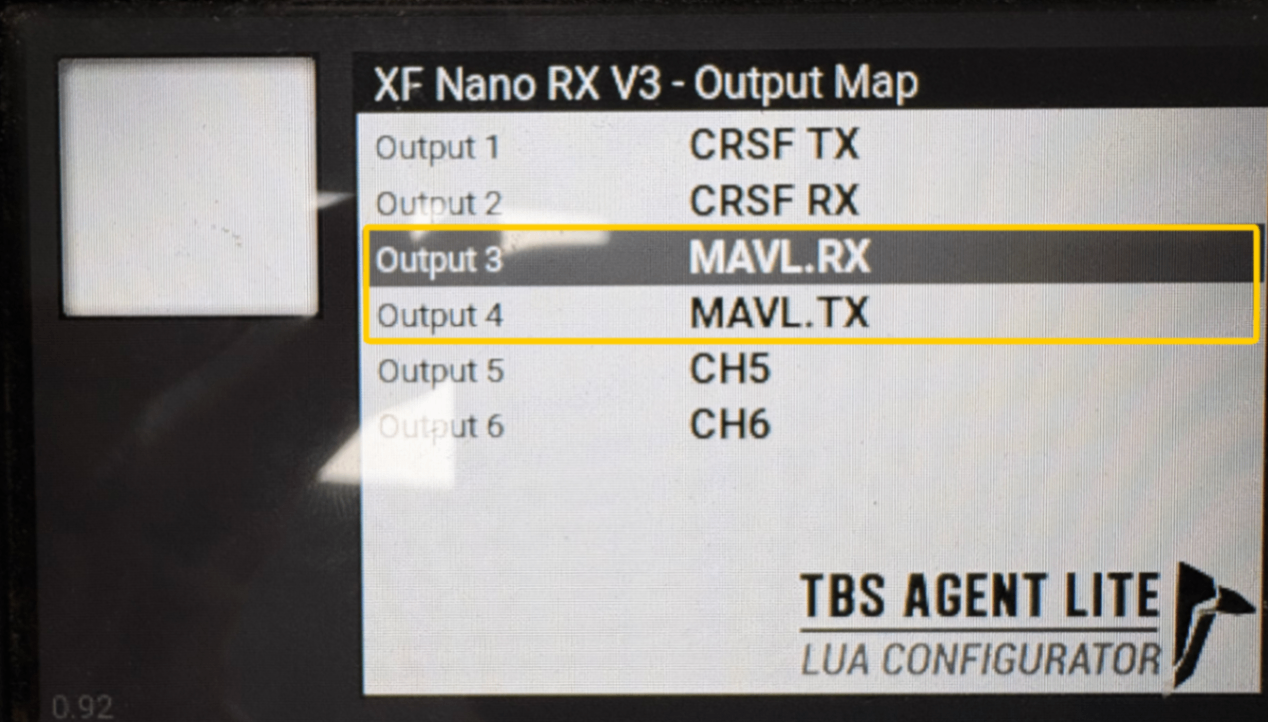
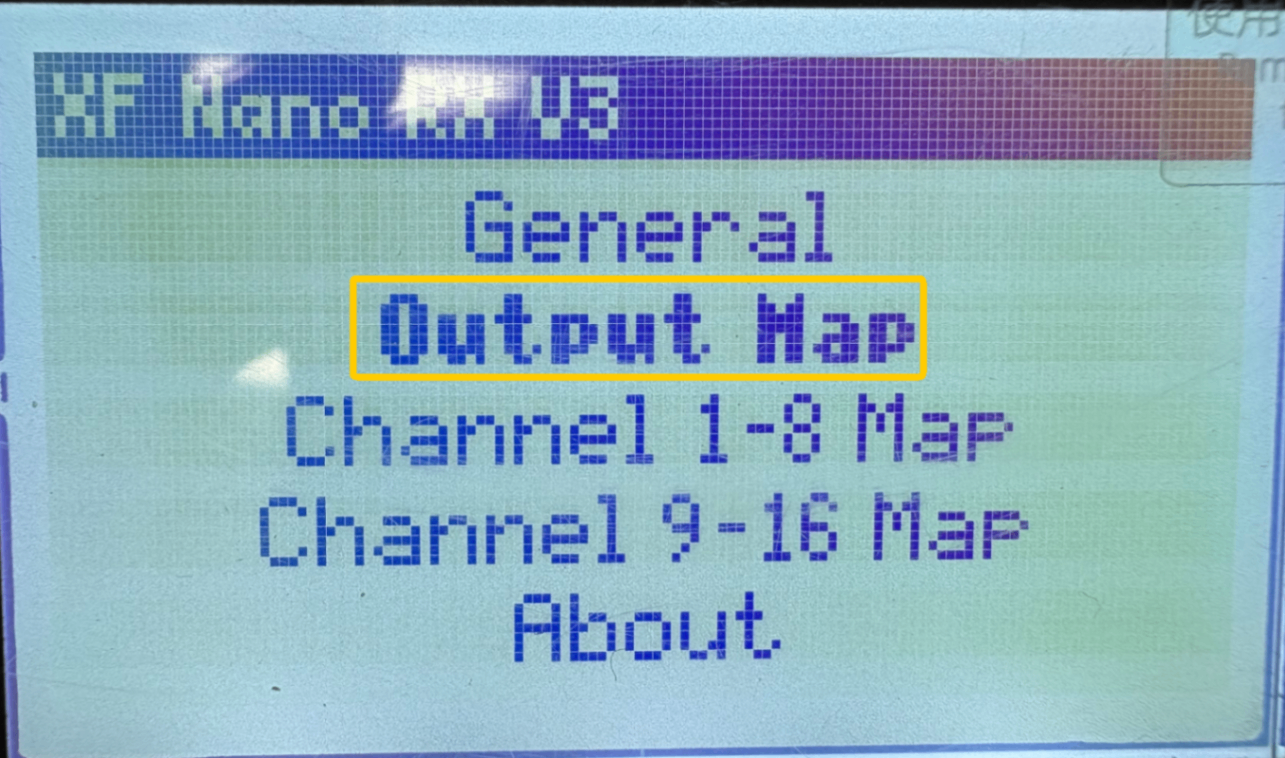
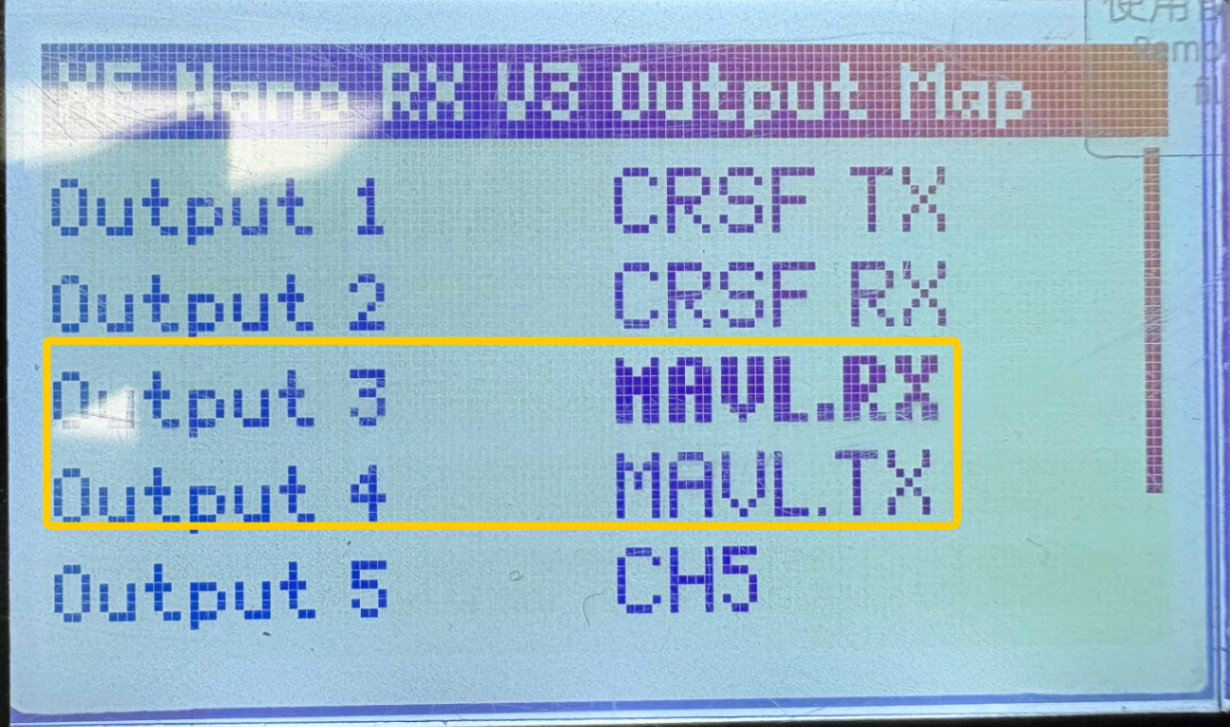
进入 Output MAP,将:
- Output 3 改为 MAVL.RX
- Output 4 改为 MAVL.TX
彩色屏幕:
黑白屏幕:
3.2.3 开启 TX MAVLink 支持
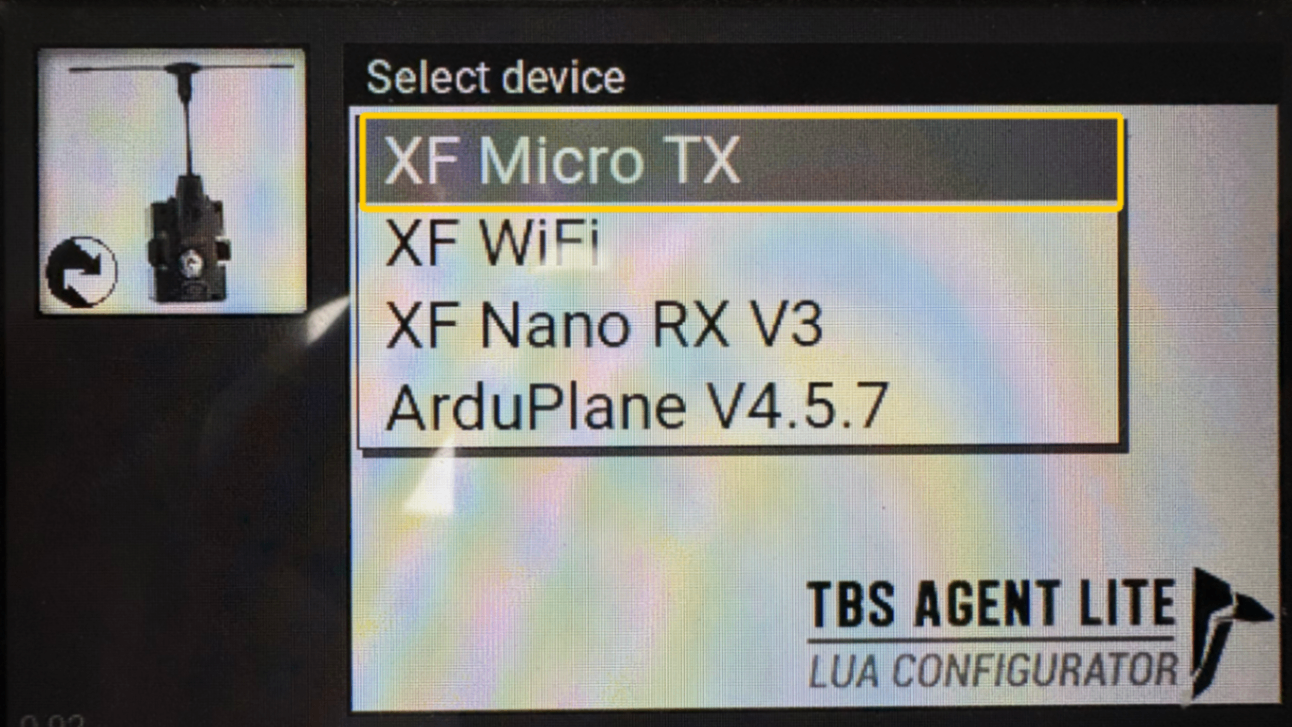
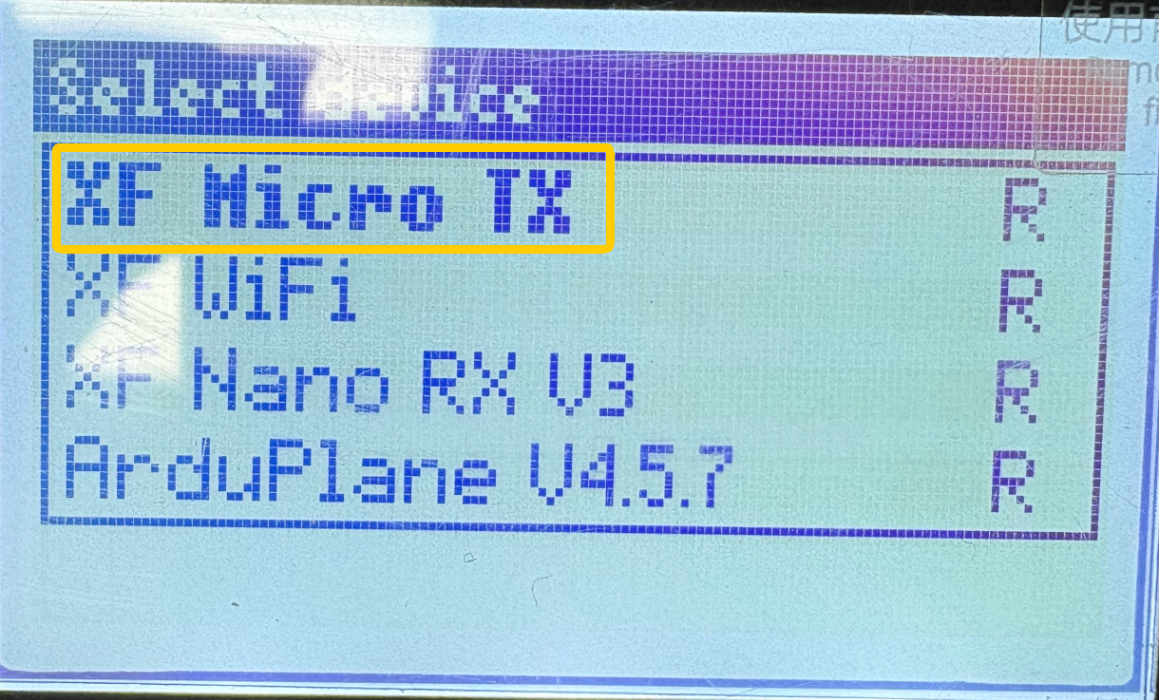
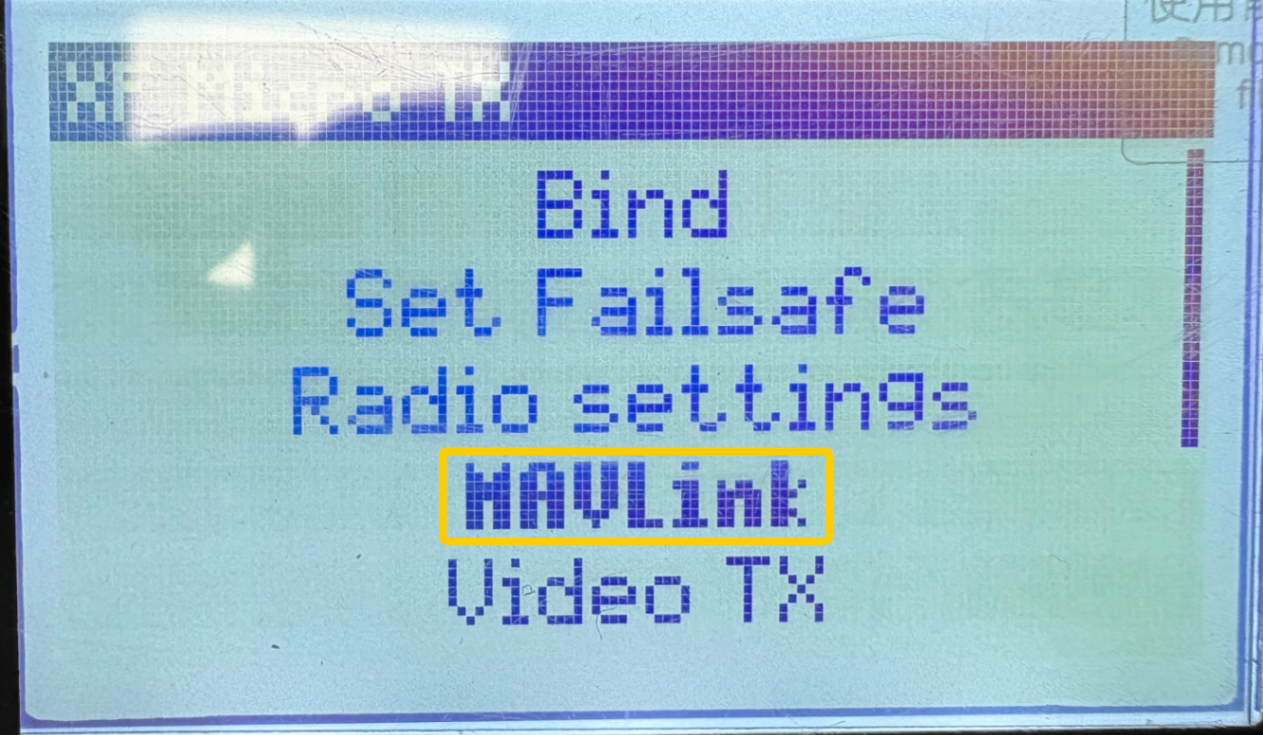
- 返回主界面,进入 XF Micro TX。
彩色屏幕:
黑白屏幕:
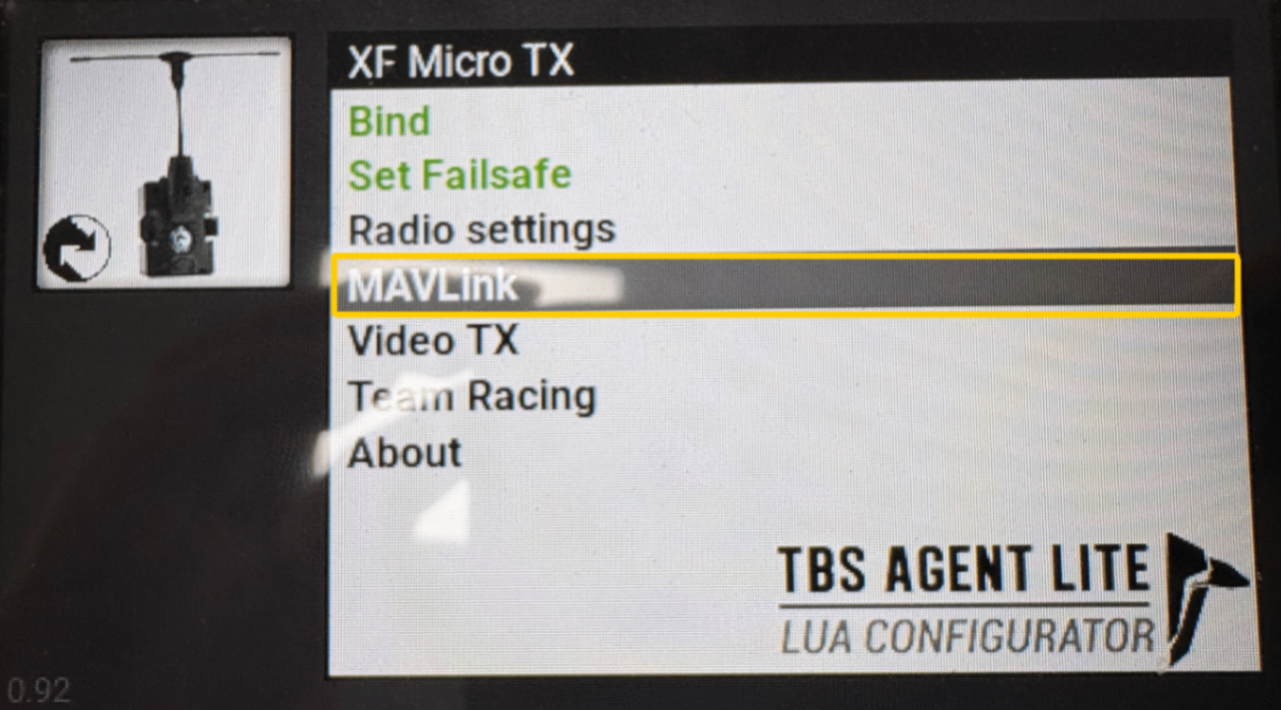
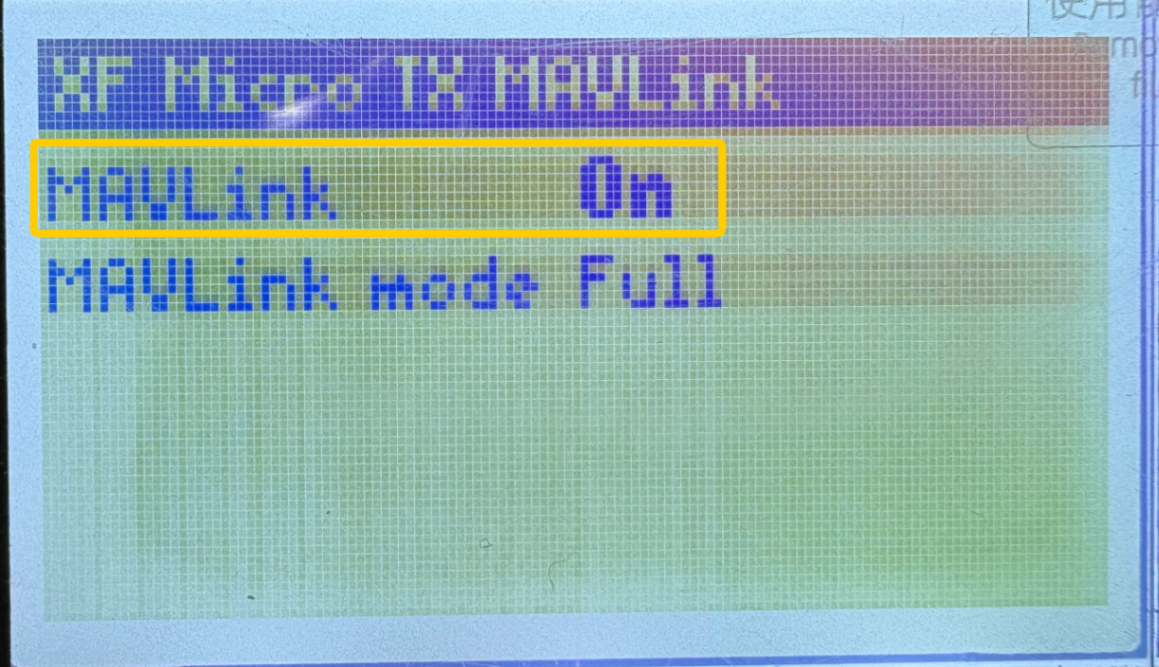
- 选择 MAVLink,并将开关调整为 On。
彩色屏幕:

黑白屏幕:
3.2.4 配置 WiFi 连接
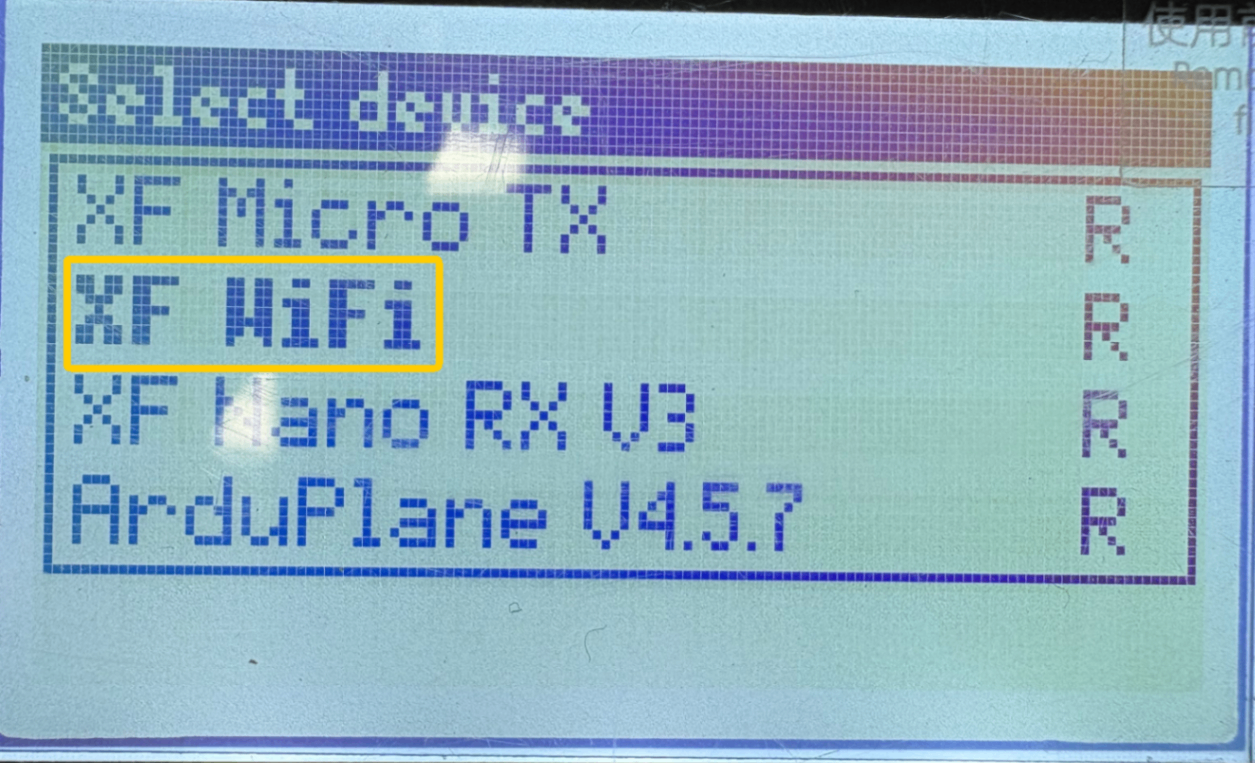
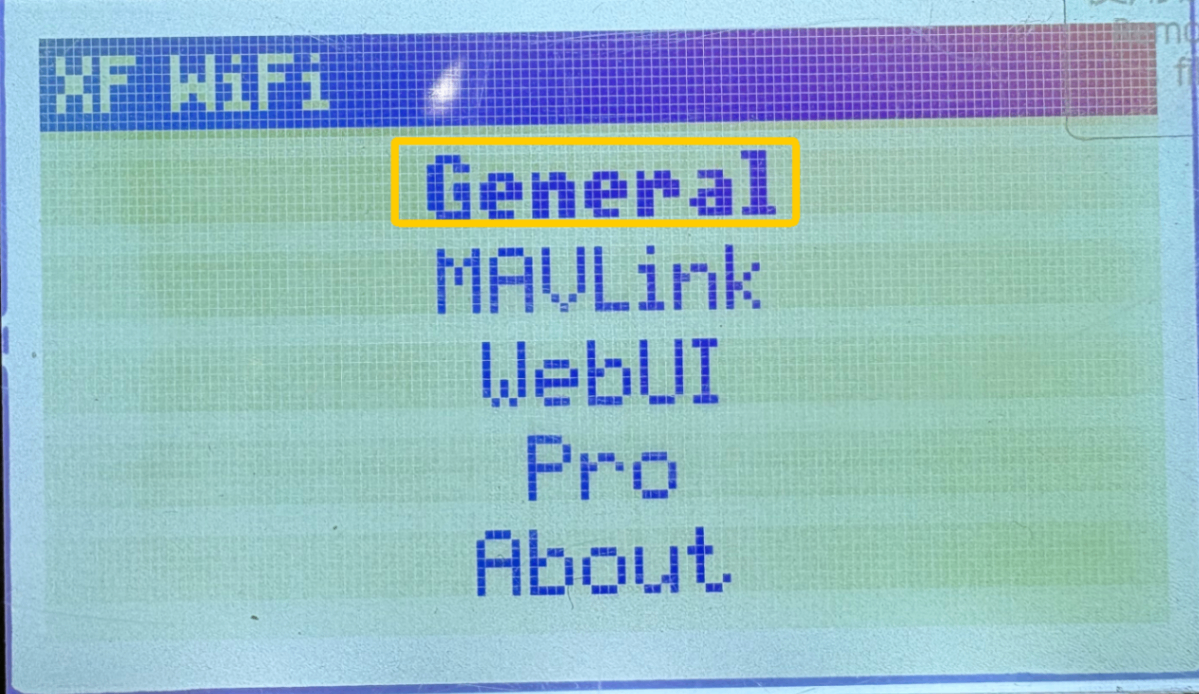
- 返回主界面,进入 XF WiFi,进入General页面。
彩色屏幕:
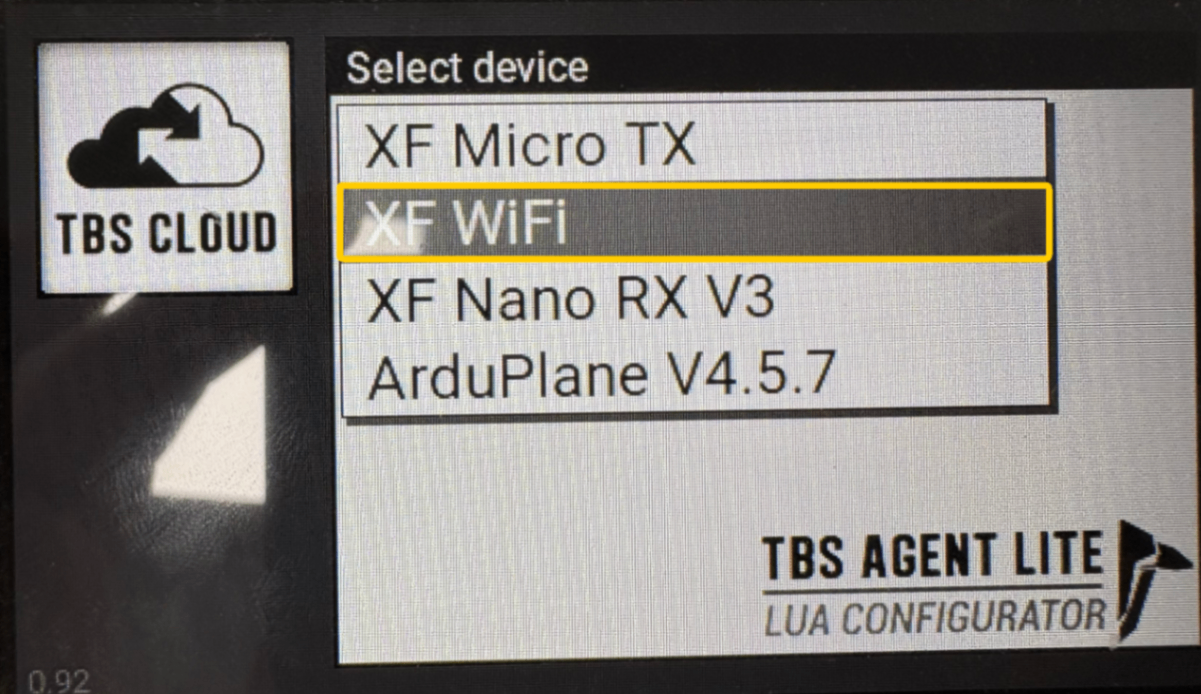
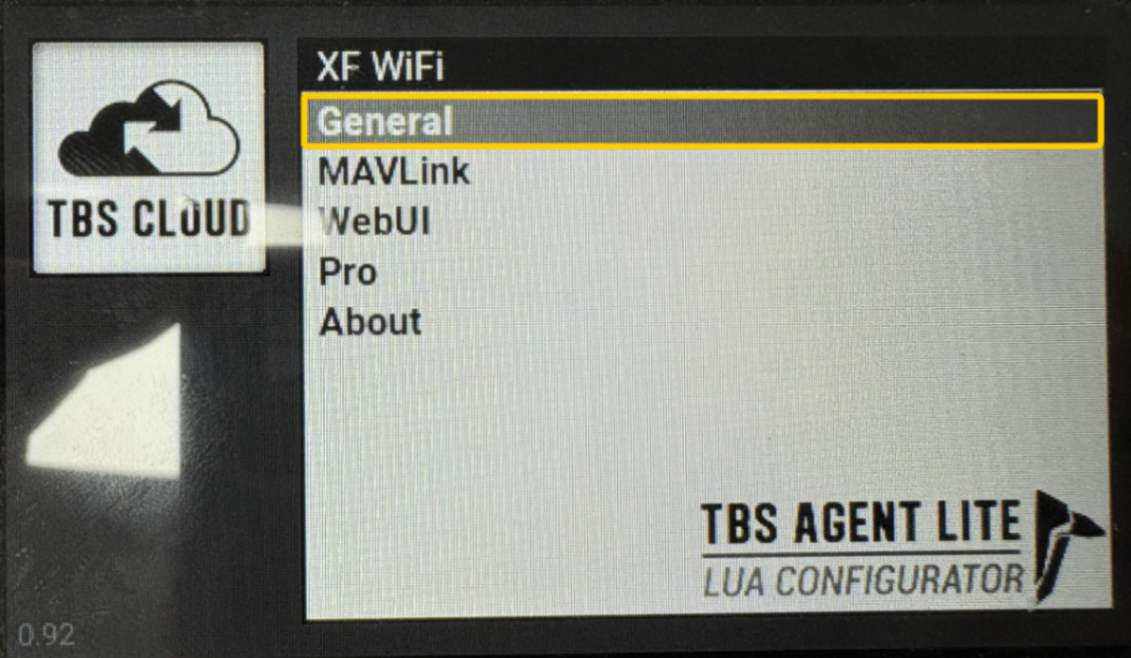
黑白屏幕:
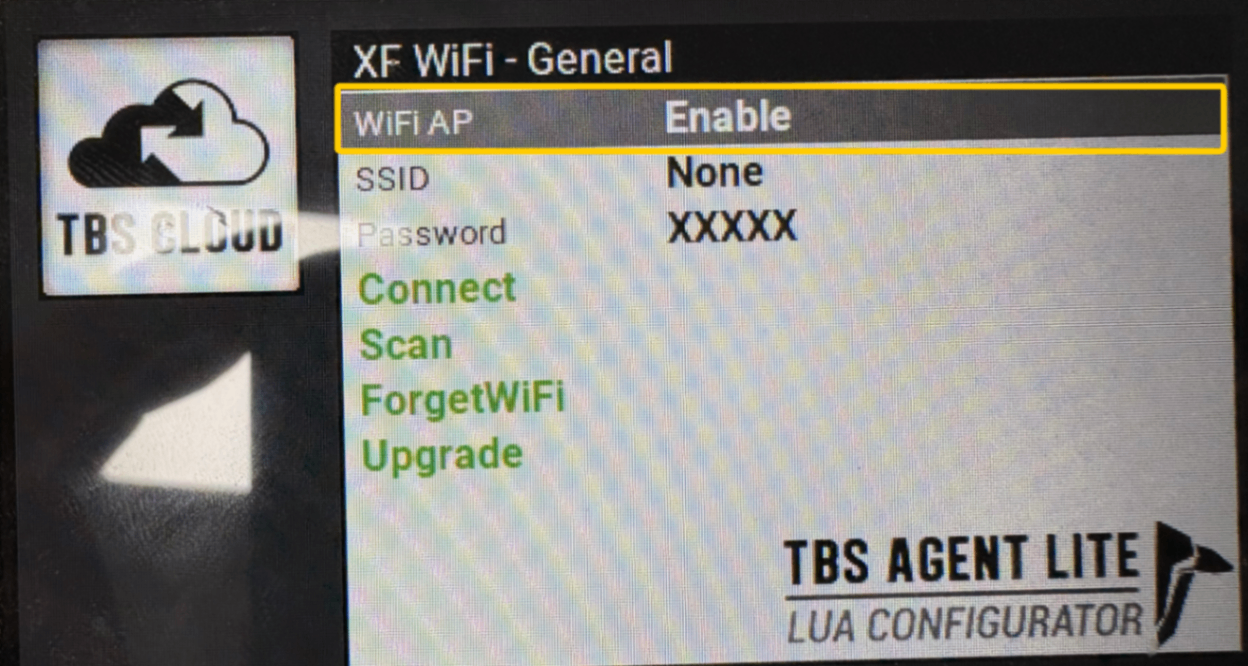
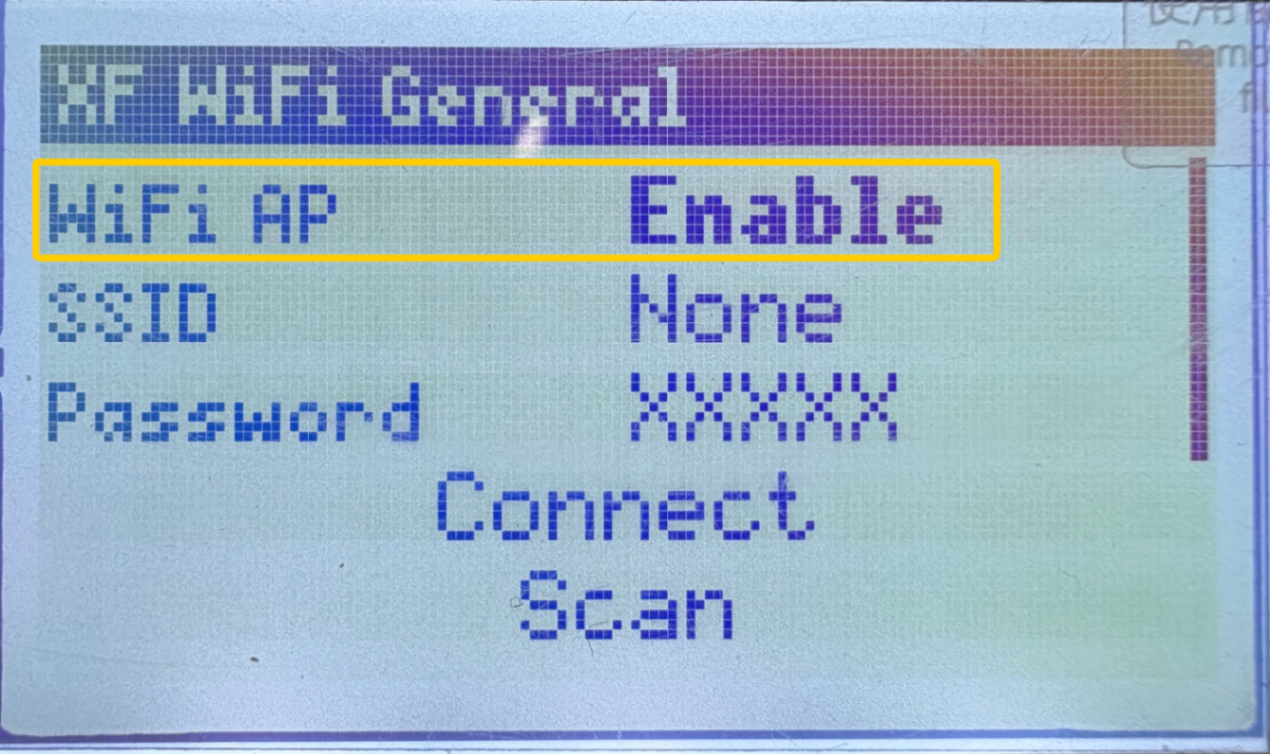
- 将 WiFi AP 设置为 Enable。
彩色屏幕:
黑白屏幕:
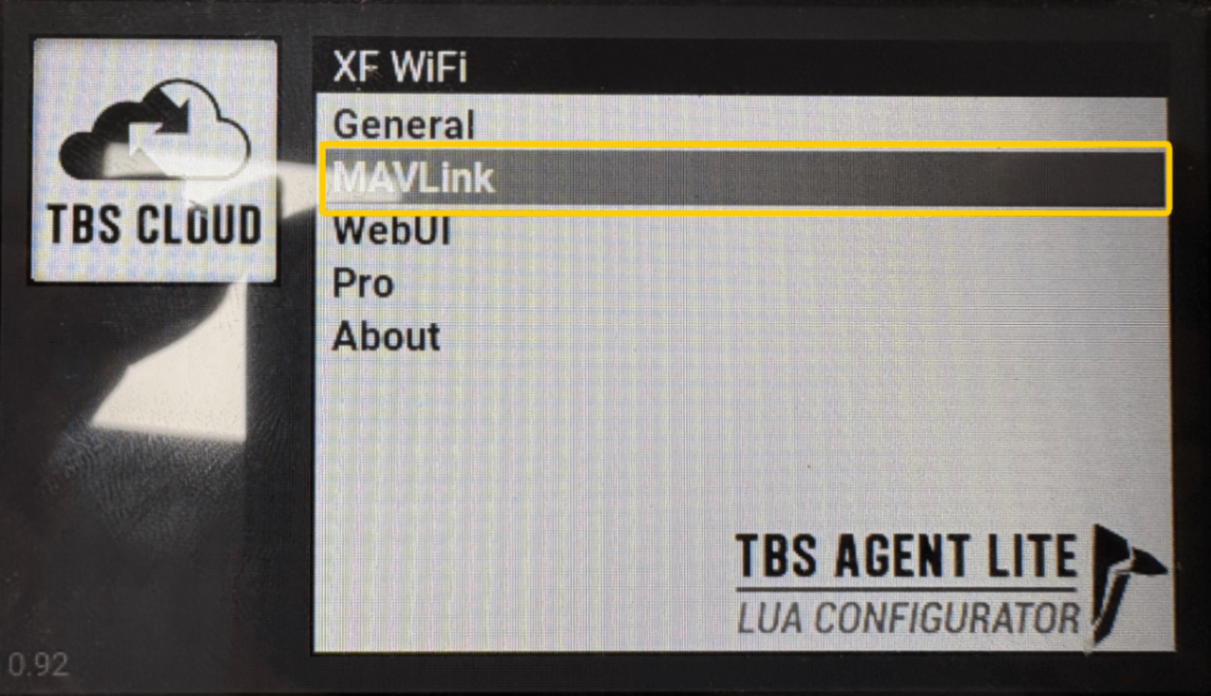
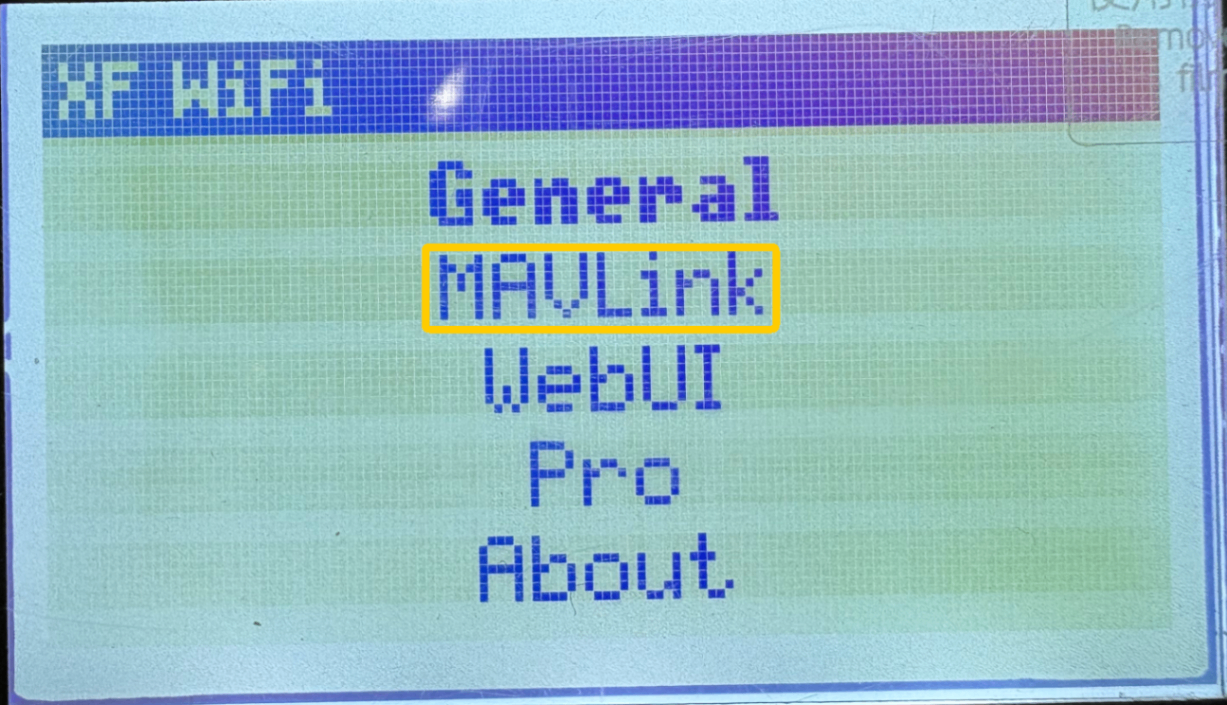
- 进入 MAVLink 页面。
彩色屏幕:
黑白屏幕:
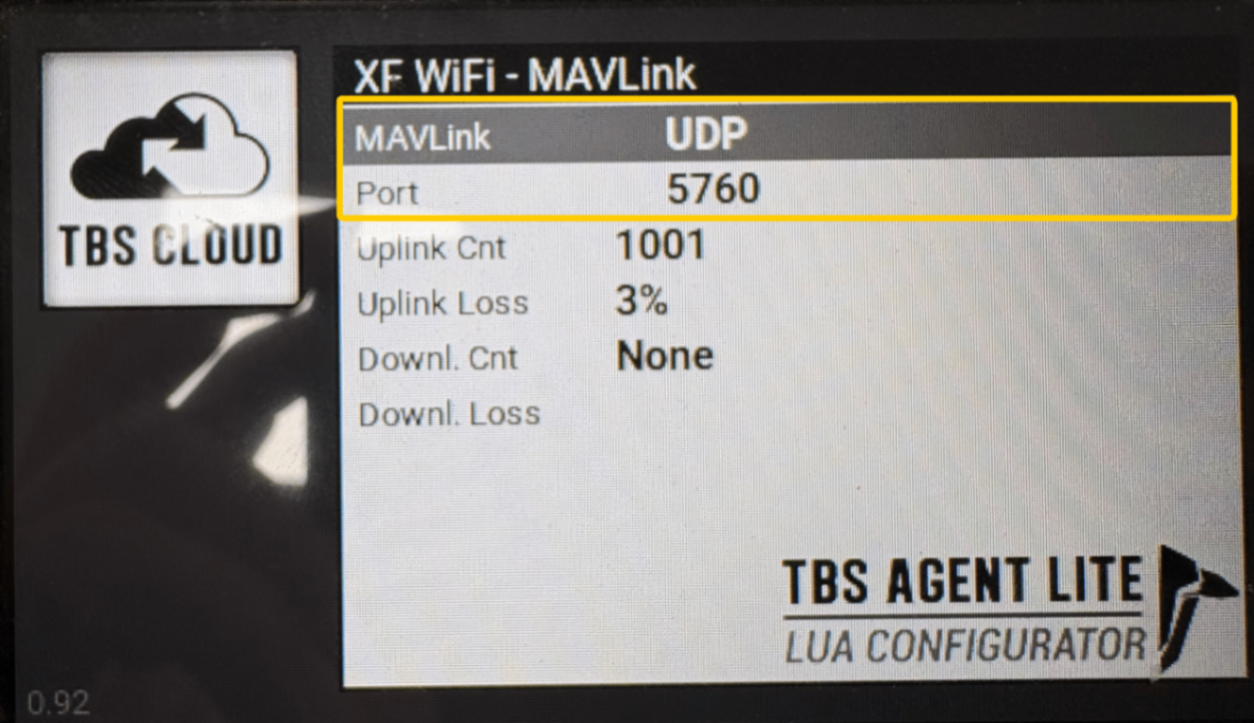
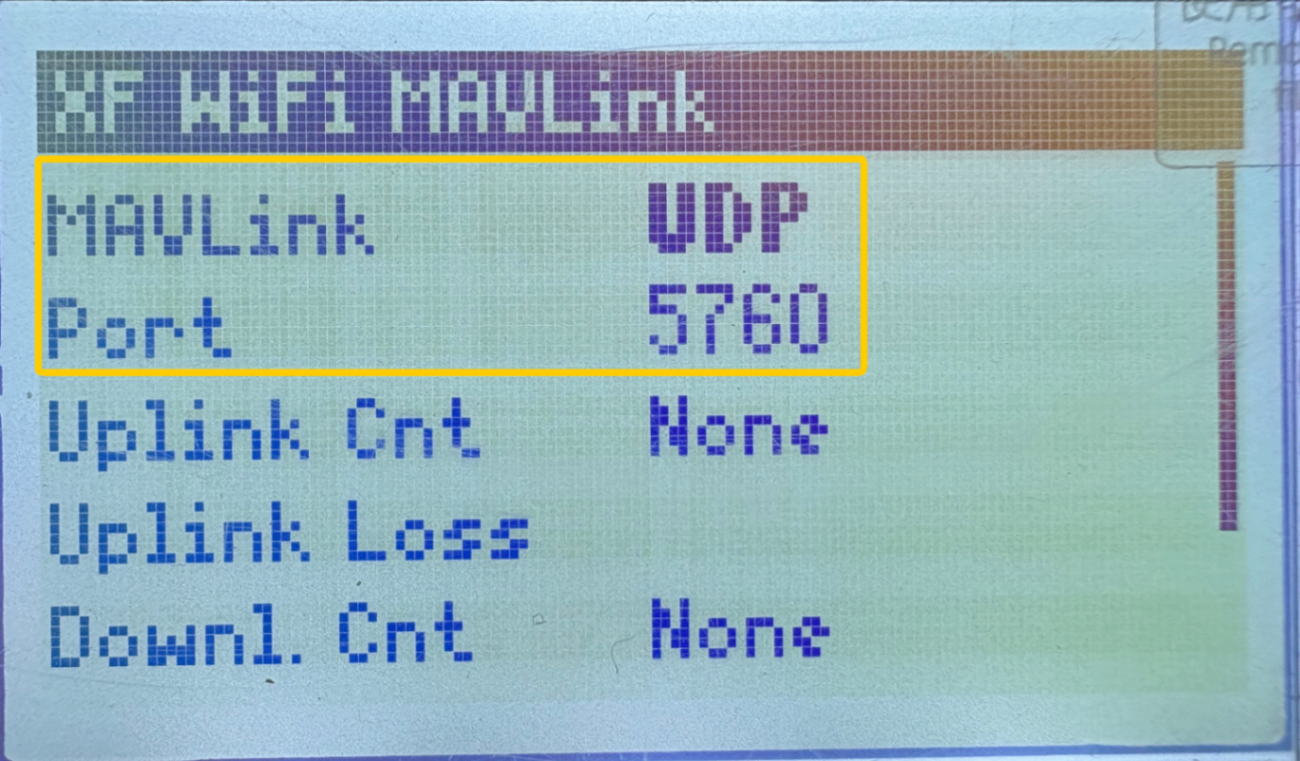
- 将 MAVLink 模式设置为 UDP。
- 记录端口号( == 以下端口号5760仅作演示,请以实际为准==****)
彩色屏幕:
黑白屏幕:
3.3 飞控参数设置
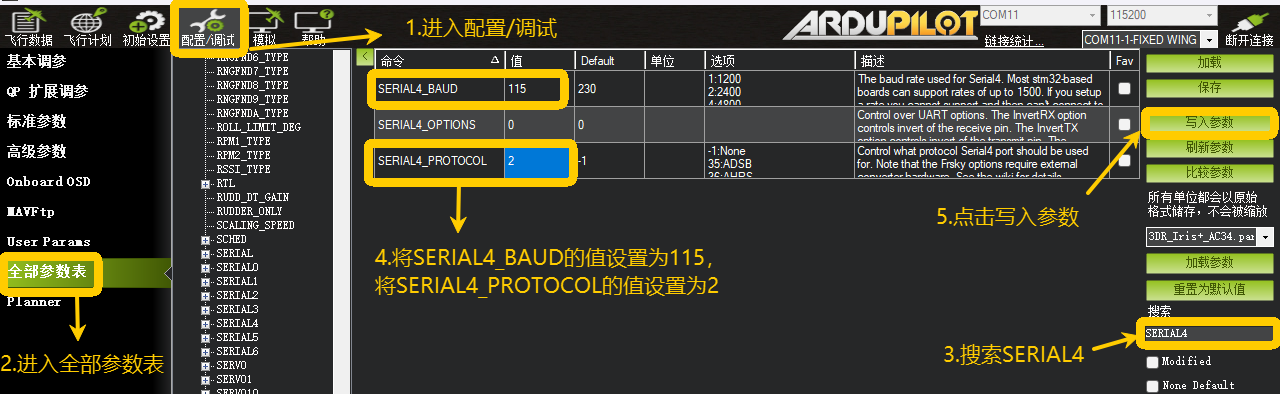
- 进入 配置/调试;
- 进入 全部参数表;
- 搜索 SERIAL4;
- 将 SERIAL4_BAUD 的值设置为 115,将 SERIAL4_PROTOCOL 的值设置为 2;
- 点击 写入参数。
3.4 地面站连接
Mission Planner 连接方式:
断开 USB 连接,使用电池给飞控供电。
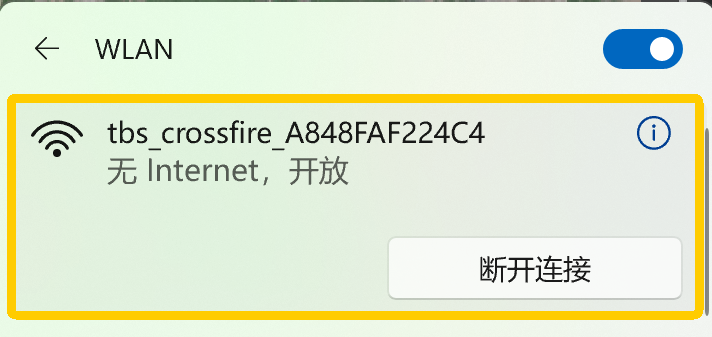
确保遥控器已连接至接收机,电脑连接 tbs_crossfire 的 WiFi。
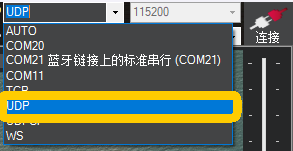
- 打开 Mission Planner:
- 选择 “UDP” 连接类型,波特率115200,点击连接。
- 端口号输入 5760(与遥控器 WiFi 设置一致)。
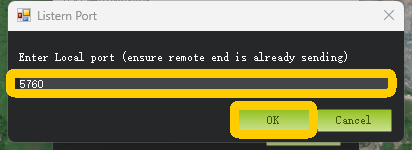
- 点击 “OK”,等待数据加载。
- 连接成功后,可点击 链接统计 查看到数据。

QGroundControl(QGC)连接方式:
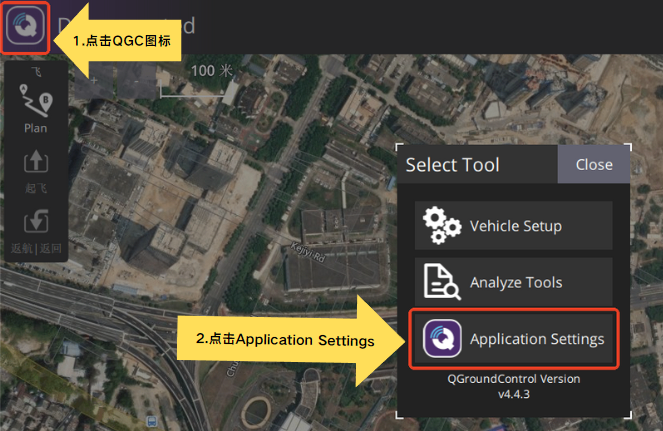
1.点击 QGC图标。
2.点击 Application Settings。
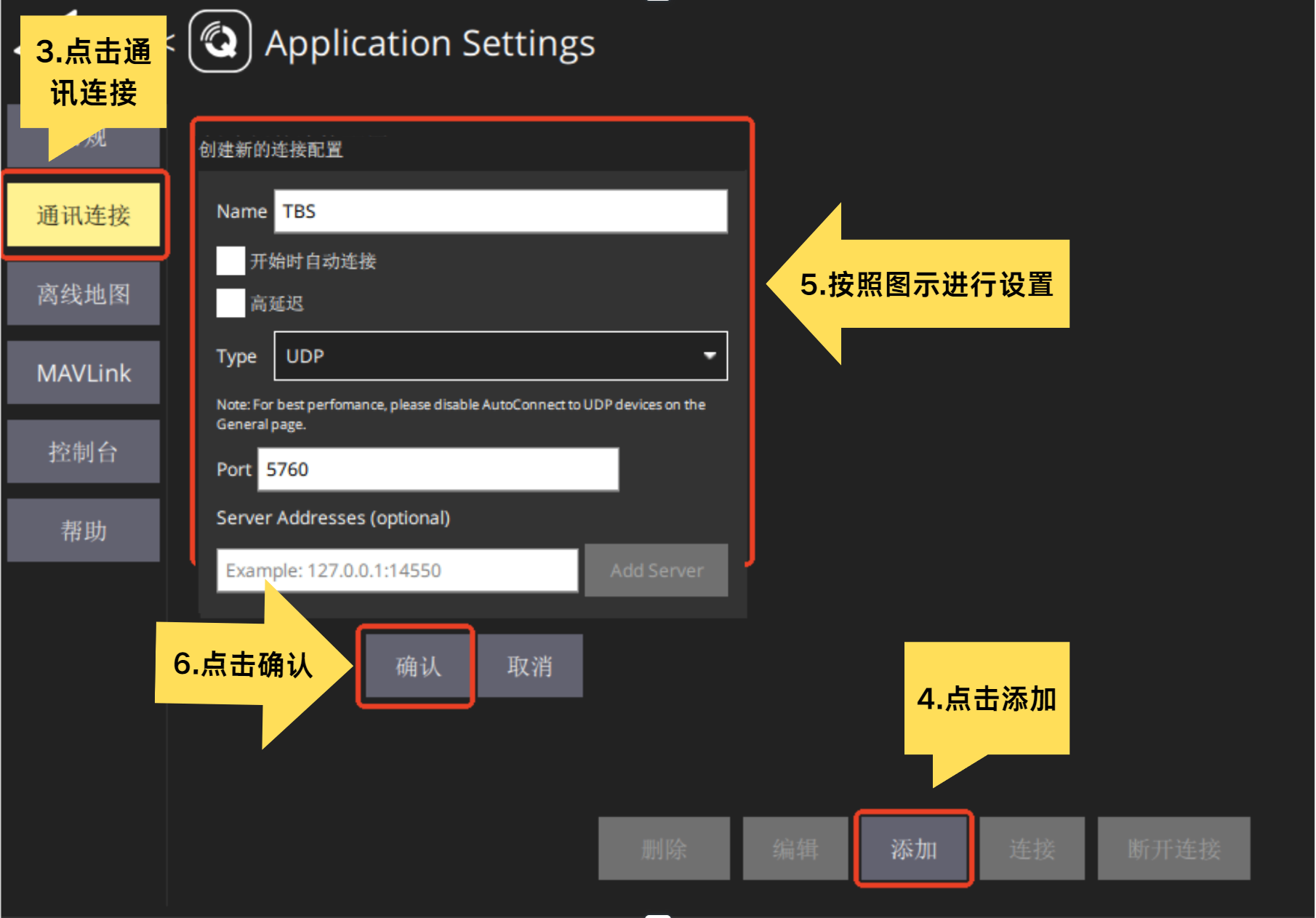
3.点击 通讯连接。
4.点击 添加。
5.按照图示进行设置。
6.点击 确认。
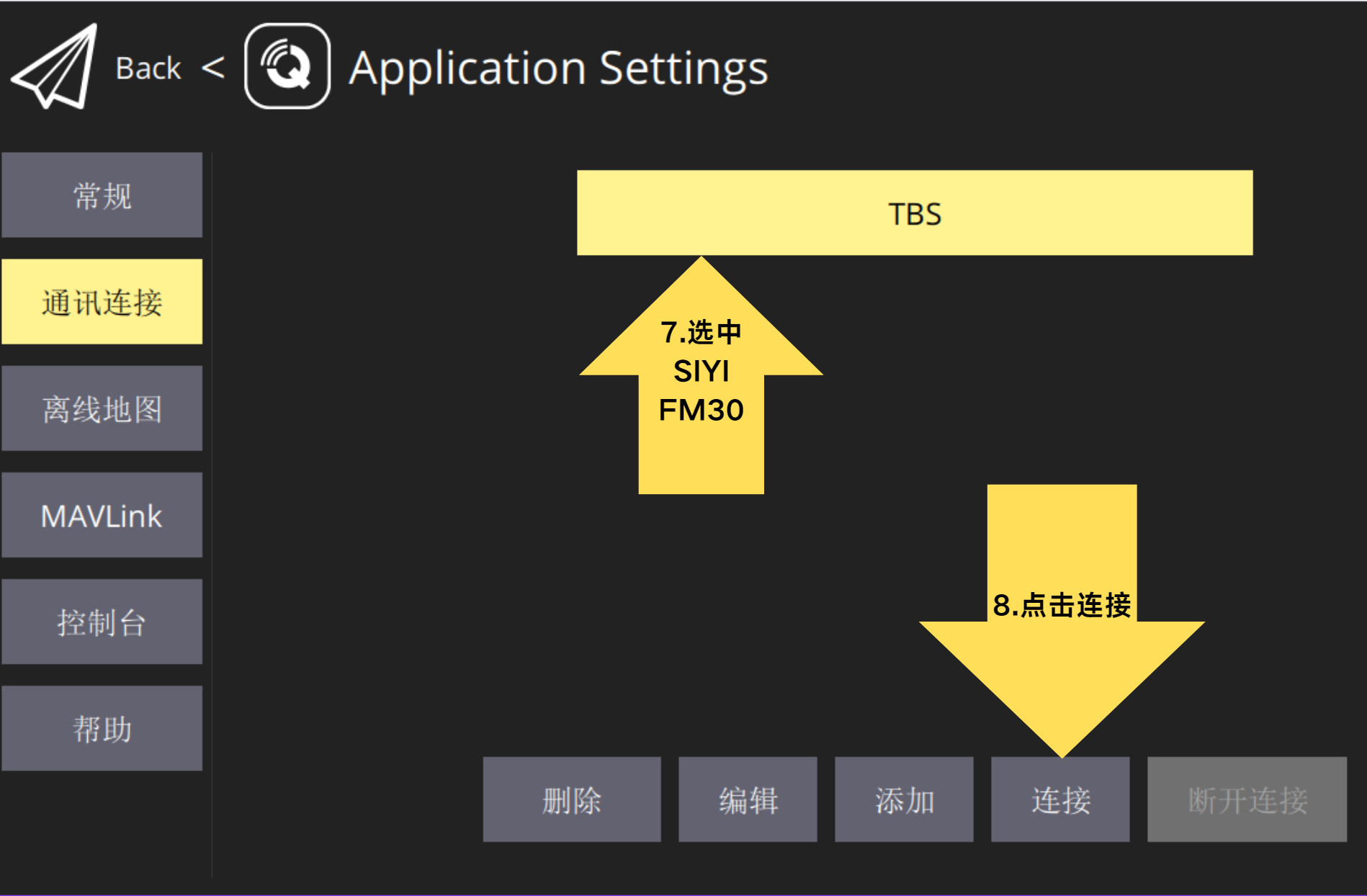
7.选中 TBS。
8.点击 连接。
- 左上角显示Not Ready,代表已成功连接。

四、Q&A
技术支持二维码
