如何设置空速计——INAV地面站
2025/5/22大约 2 分钟
一、原理
空速管(Pitot tube) 是一种用于测量飞行器速度的传感器。它通过 动压孔 和 静压孔 测量飞行器周围的空气压力差,从而计算出飞行器的 空速。 动压孔 面朝气流,感应气流产生的压力,而 静压孔 则面朝与气流垂直的方向,感应环境的静态压力。飞控系统利用这两个压力值计算出空速,并将其转化为飞行器的速度数据。这个数据可以用于飞行稳定性、航迹规划等多个方面。
二、设备准备
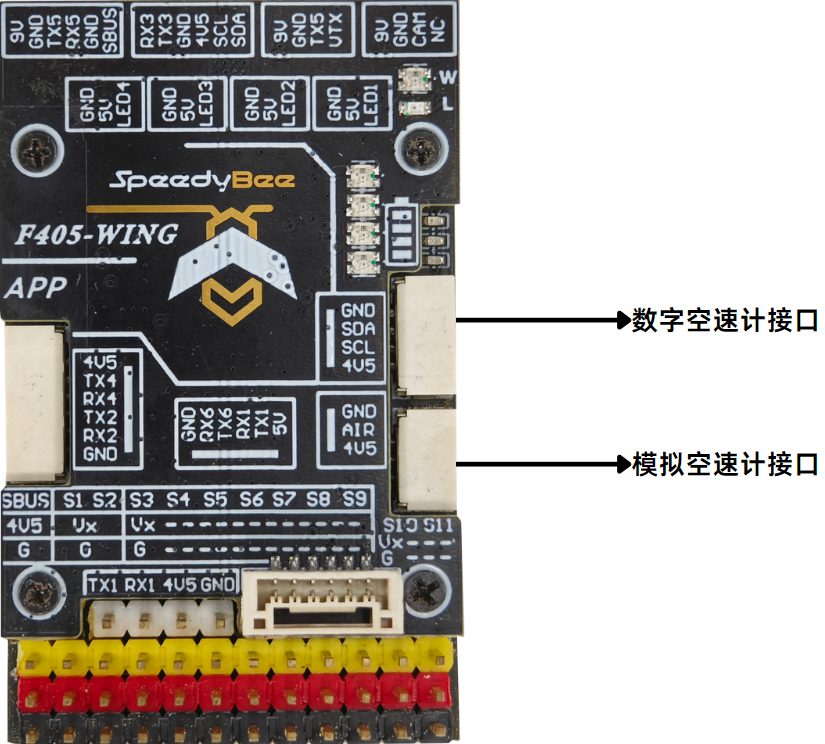
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING APP V2 飞控均适用该教程
2)空速管: 数字空速管或模拟空速管
3)连接线: 用于连接空速管和飞控的接口线
4)INAV地面站
三、具体操作
1.空速管的安装
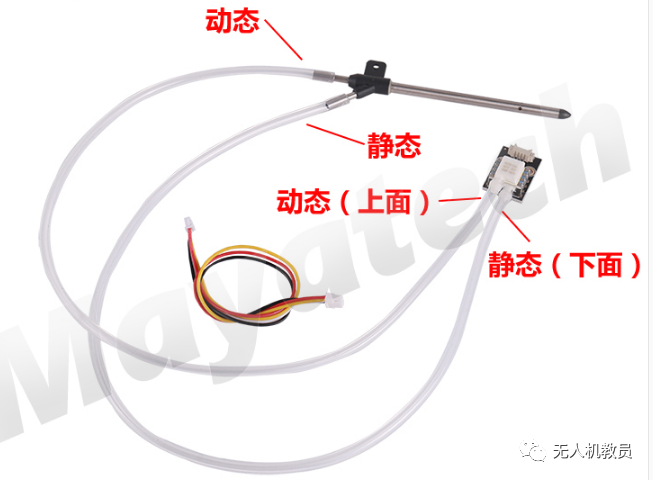

--图片来源于无人机教员公众号
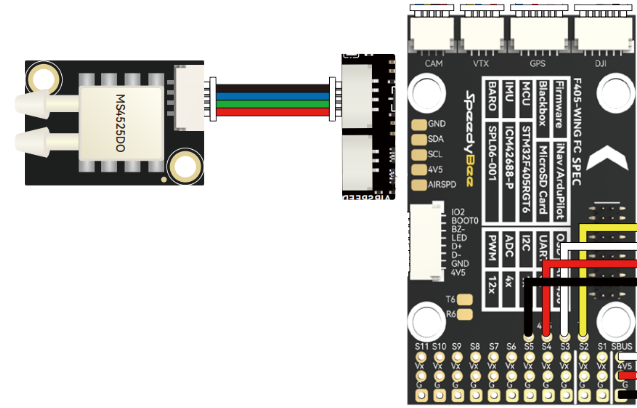
2.空速计与飞控接线
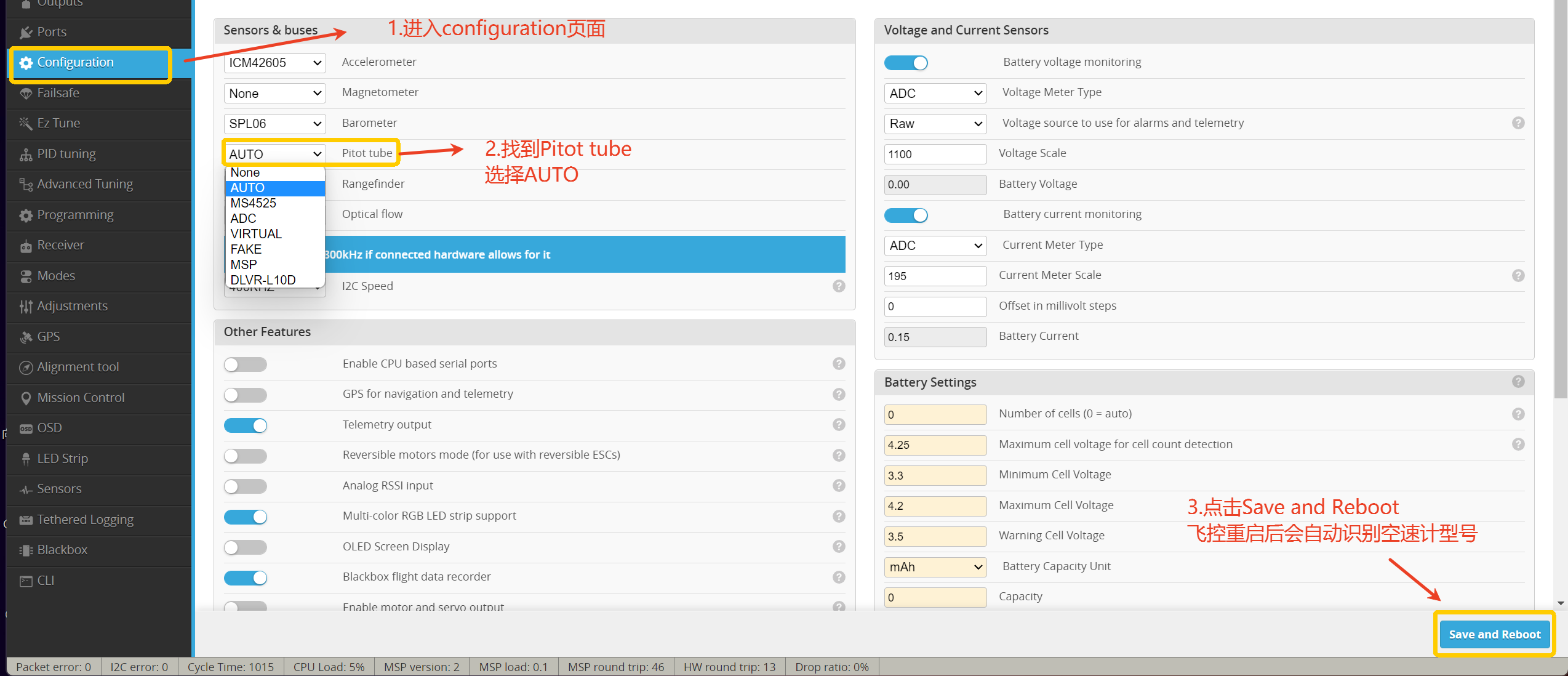
3.参数设置
1)打开INAV地面站,点击Configuration页面→找到Pitot tube,选择AUTO→点击Save and Reboot,飞控重启后会自动识别空速计型号。
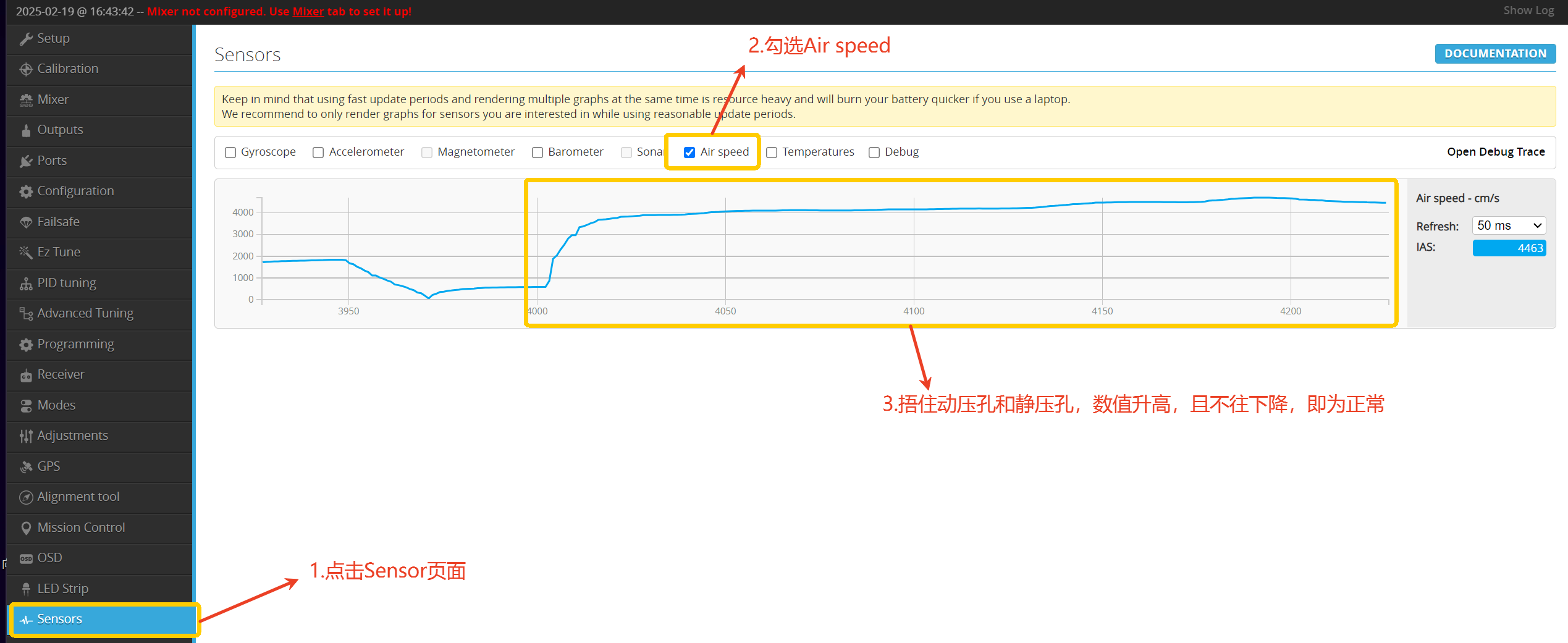
4.空速计测试
点击Sensors,找到空速,测试空速管是否正常。
堵住动静压孔,数值升高,且不往下降,即为正常
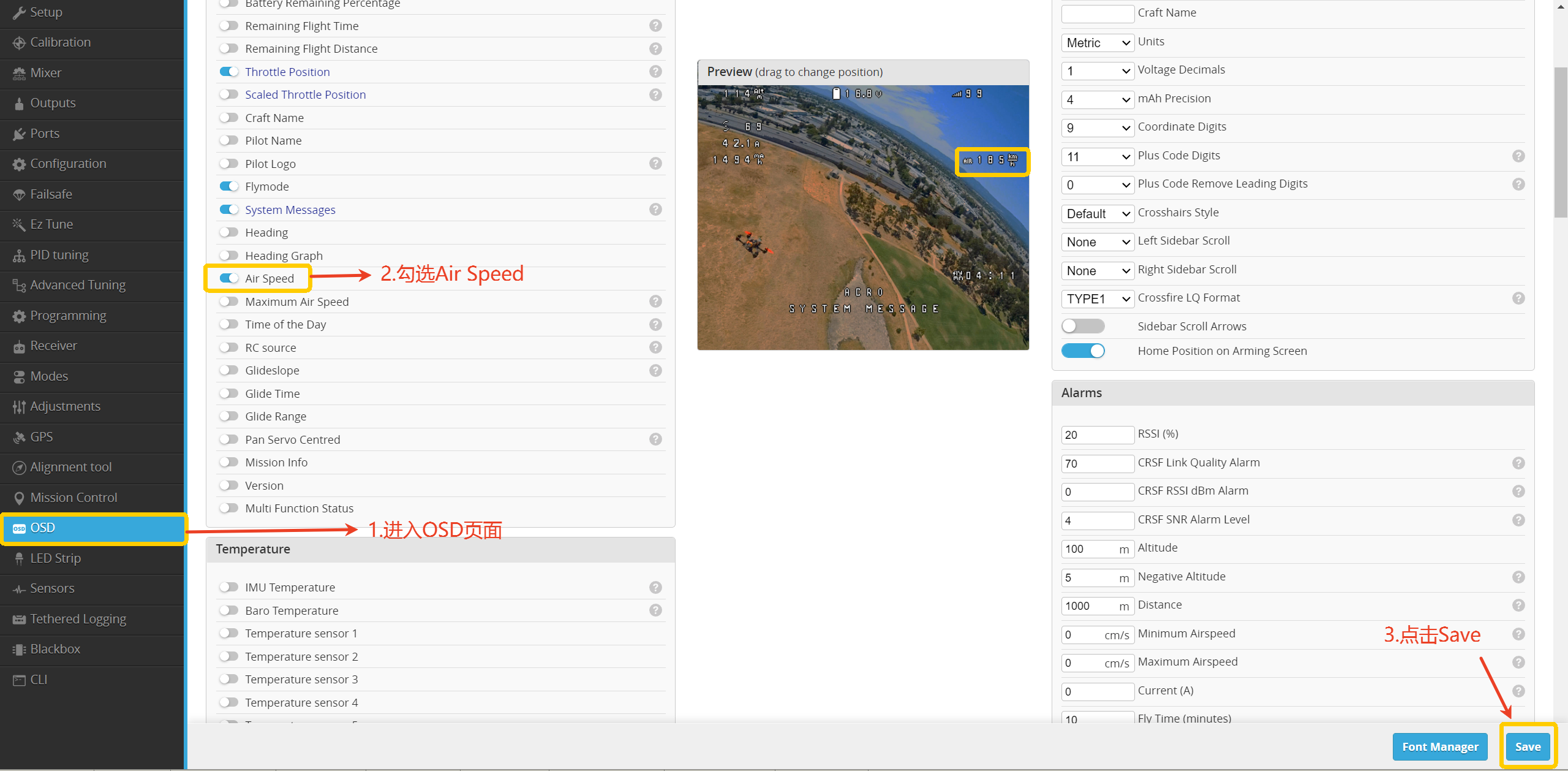
5.空速OSD设置
四、Q&A
Q:空速管无法正常工作,怎么办?
A:确保 接线正确,特别是动静压孔的连接是否紧固。在 Sensors 页面 中检查空速管是否显示正常,若无数据,重新启动飞控并测试。
技术支持二维码
