自动调参、自动水平模式如何操作
2025/5/22大约 3 分钟
一、原理
在飞行器调试过程中,飞控的安装角度或控制参数可能会影响飞行姿态和操控手感。 AUTOLEVEL(自动水平校准) 和 AUTOTUNE(自动调参) 这两种功能可以帮助优化飞行体验:
1.AUTOLEVEL(自动水平校准)
- 适用于 飞控安装角度 与 飞机平飞角度 不一致的情况。
- 在 自稳模式 或其他 飞控主导模式 下,若飞机出现 抬头或低头 现象,可以通过 AUTOLEVEL 进行飞控姿态校准。
2.AUTOTUNE(自动调参)
- 适用于 飞机操控手感不佳 或 过于敏感 的情况。
- 通过飞行过程中自动调整 PID 参数,使飞机 飞行姿态更加平稳,手感更顺滑。
二、设备准备
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)已完成装机的飞机:包含遥控器,接收机,图传和FPV设备(小飞手)等。
三、具体操作
3.1使用AUTOLEVEL(自动水平校准)
适用于: 飞机在 自稳模式 或 其他飞控主导模式 下,出现 抬头或低头 现象。
1.起飞后,切换遥控器至 AUTOLEVEL 模式。
2.保持飞机平飞,确保姿态稳定。
3.飞控会自动校准飞控的安装角度,优化飞机的水平姿态。
4.观察飞机是否仍然出现明显的抬头或低头:
- 若飞行平稳,说明校准完成。
- 若仍有偏差,可重复 AUTOLEVEL 操作,或检查飞控安装角度。
3.2 使用 AUTOTUNE(自动调参)
适用于: 飞机在 飞行过程中手感不佳,控制 过于灵敏或迟钝。
3.2.1 进入 AUTOTUNE 模式
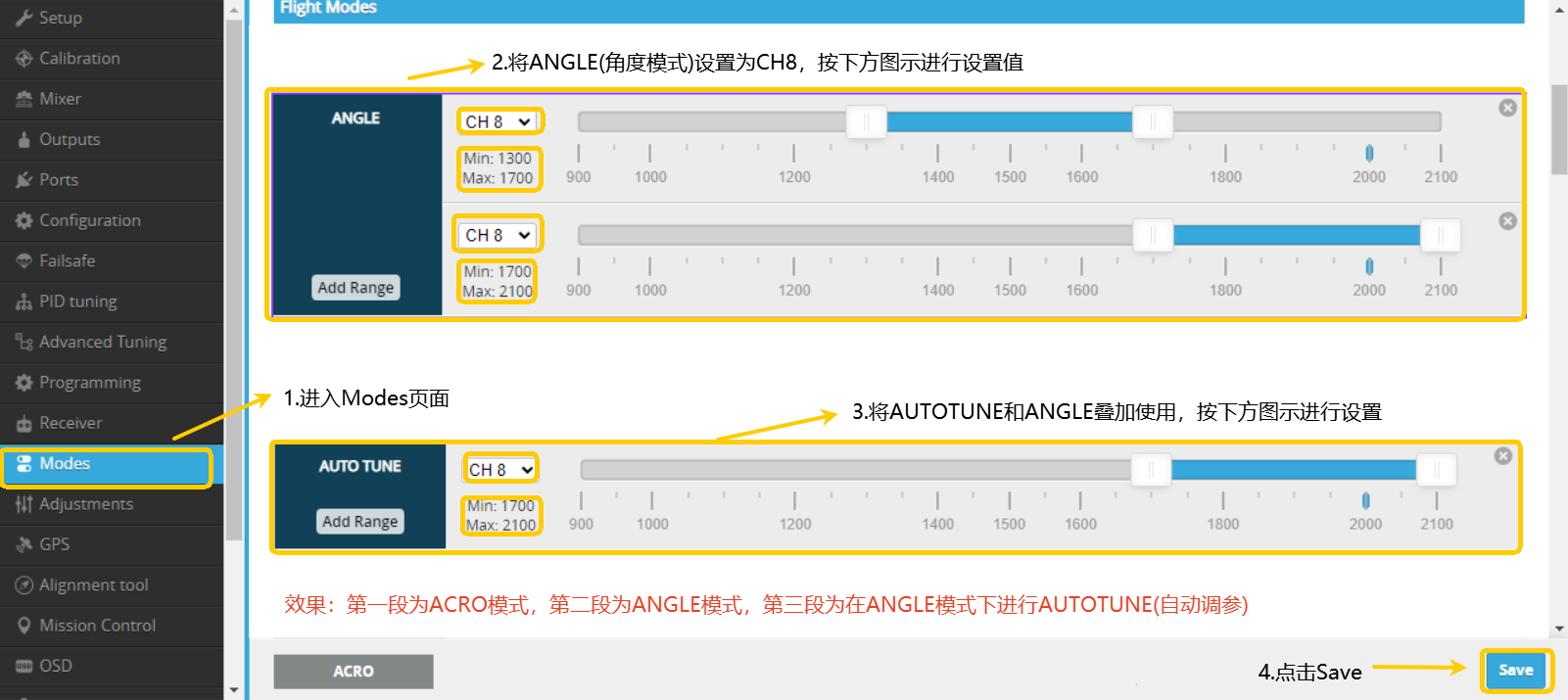
- 进入 Modes。
- 将 ANGLE(角度模式) 通道设置为 CH8,按照下方图示进行设置,拓展值范围需要点击 Add range。
- 将 AUTOTUNE 和 ANGLE 叠加使用,按照下方图示进行设置。
- 点击 Save。
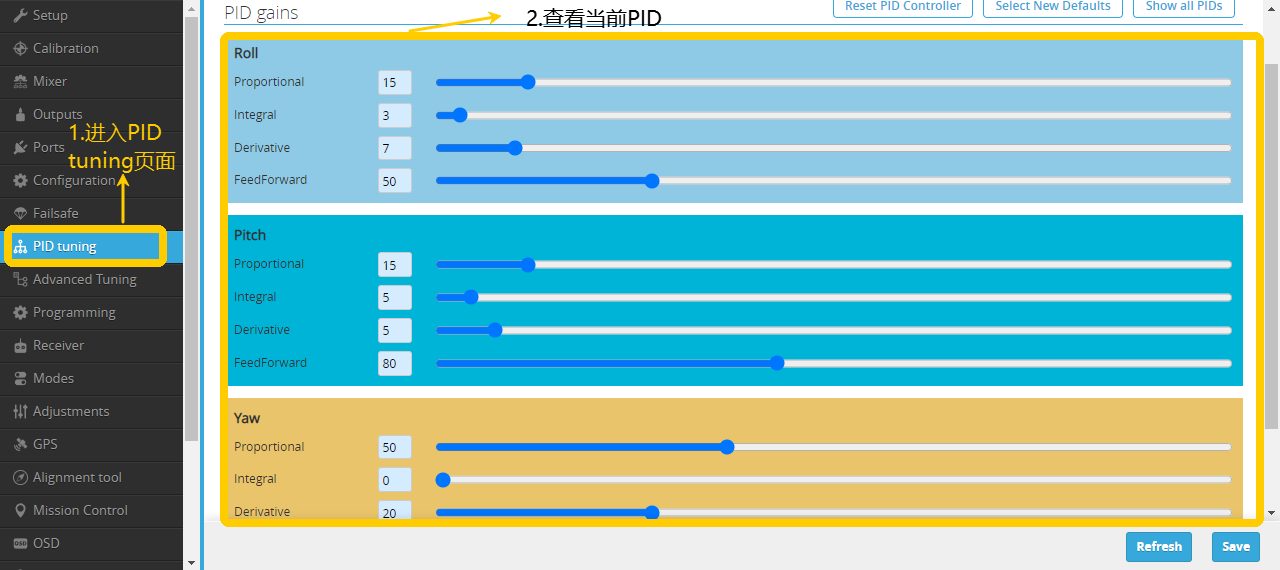
- 进入PID tuning页面
- 查看当前PID
3.2.2 进行横滚自动调参
起飞后,切换遥控器至 AUTOTUNE 模式。
保持飞机平飞,确保飞行稳定。
3.在 平飞过程中,进行 滚转(Roll)自动调参:
- 先向左打满摇杆,达到 最大左滚转角度。
- 快速回到中位。
- 再向右打满摇杆,达到 最大右滚转角度。
- 重复该操作约 20 次,飞控会自动调整滚转参数。

3.2.3 进行俯仰自动调参
1.当 滚转调参完成 后,开始 俯仰(Pitch)自动调参:
- 向上拉满摇杆,达到 最大俯仰角度。
- 快速回到中位。
- 向下推满摇杆,达到 最大俯仰角度。
- 重复该操作,直至飞行手感合适。

3.2.4 在AUTOTUNE降落 并保存参数
1.在AUTOTUNE模式下,完成降落。
2.飞机着陆后,不要断电,保持飞控供电。
3.保存调参数据:
- 将遥控器的左摇杆推至左下角,同时 右摇杆推至右下角,如下图。
- 等待飞控发出“嘀”声,表示参数保存成功。


保存参数成功后,上锁并断开所有供电!
3.2.5 确认自动调参是否成功写入
- 使用数据线将飞控连接至地面站
- 再次查看PID页面,查看PID数值是否有变化,有变化即代表自动调参参数已保存。
四、Q&A
技术支持二维码
