如何设置飞控不同的安装方向———在INAV地面站
2025/5/22大约 2 分钟
一、原理
飞控默认应 水平安装,方向朝前,但在某些特殊机型或空间受限的情况下,可能需要 倒装或旋转安装。为了确保传感器正确识别飞行方向, 需要在 INAV 配置中调整飞控方向参数,以匹配实际安装角度。
二、设备准备
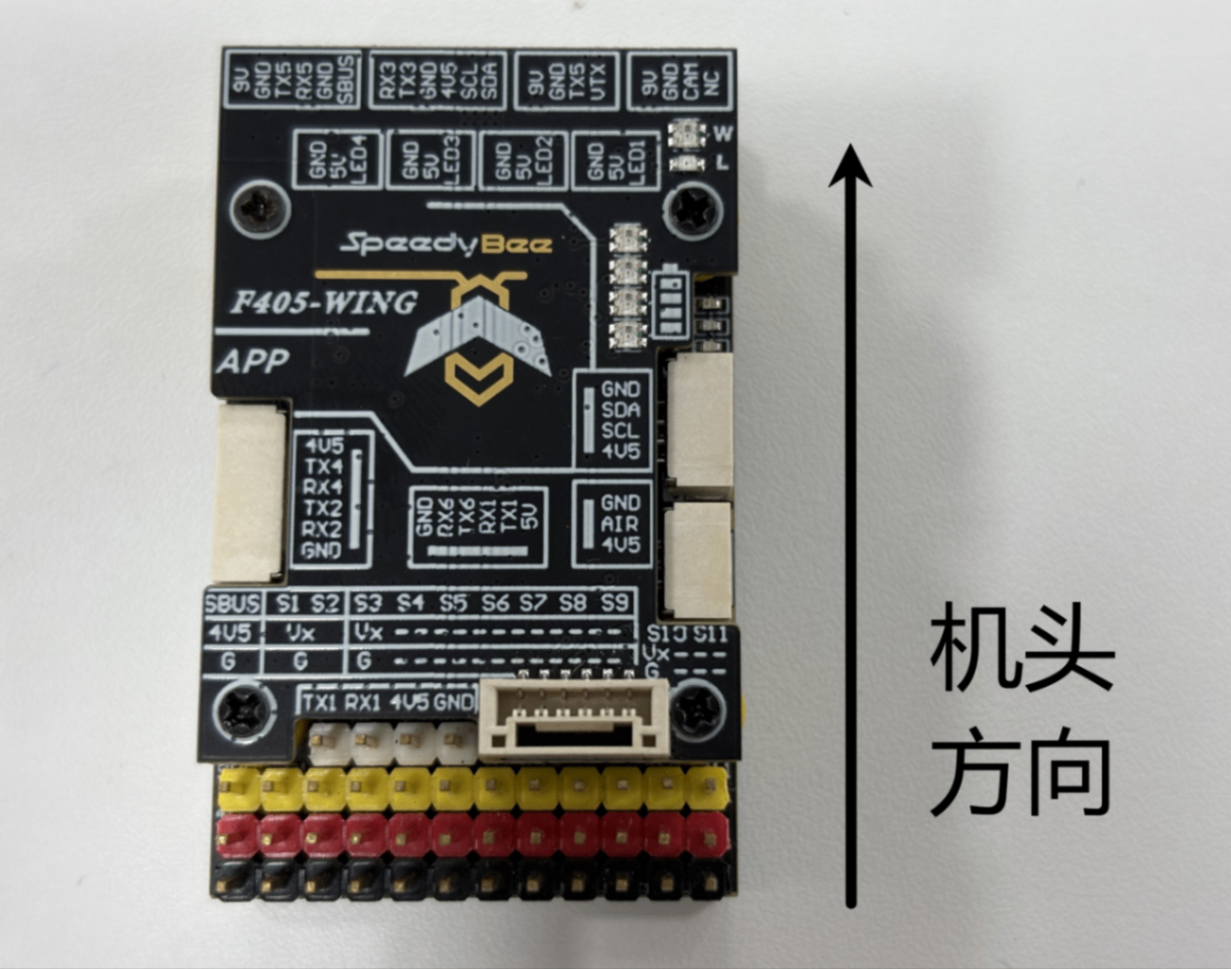
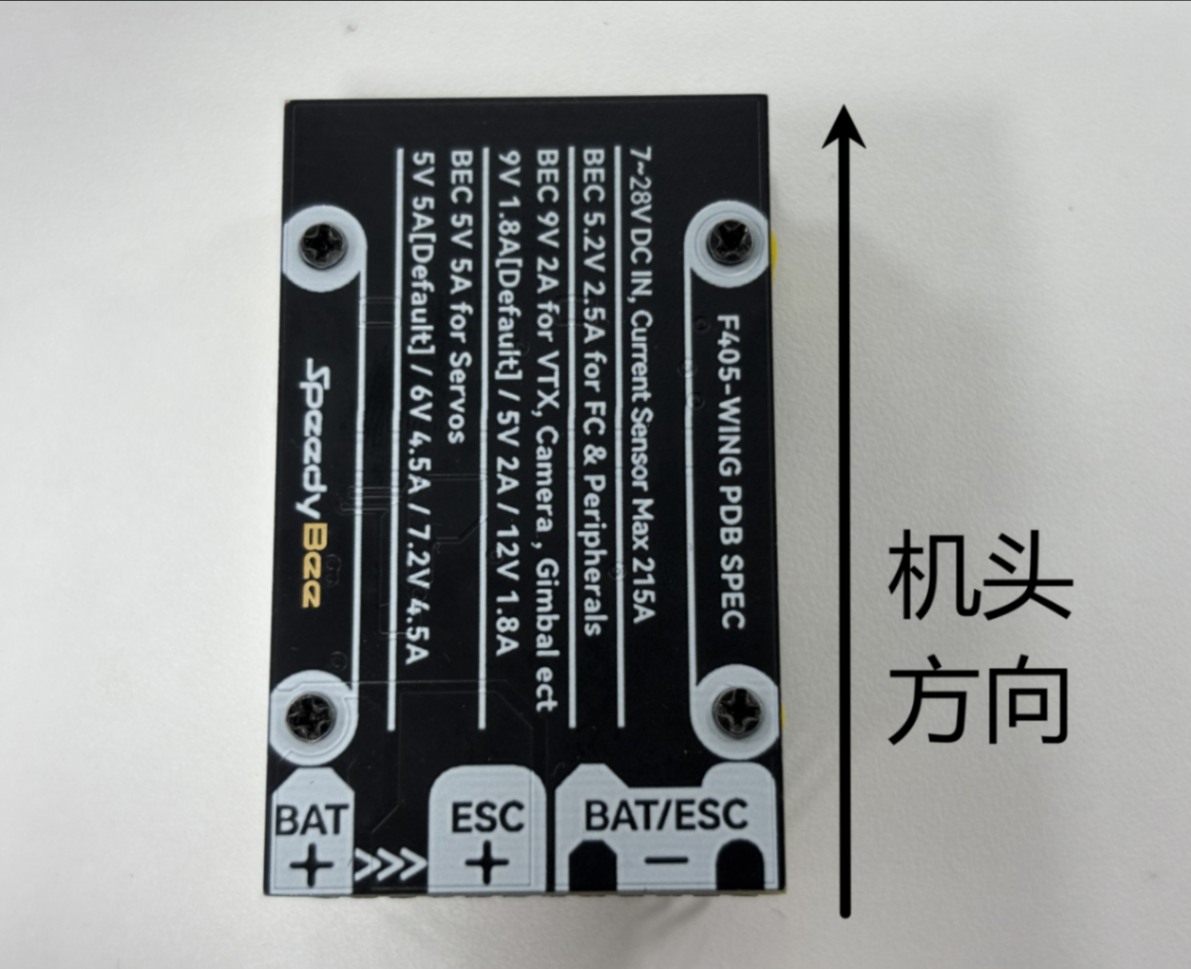
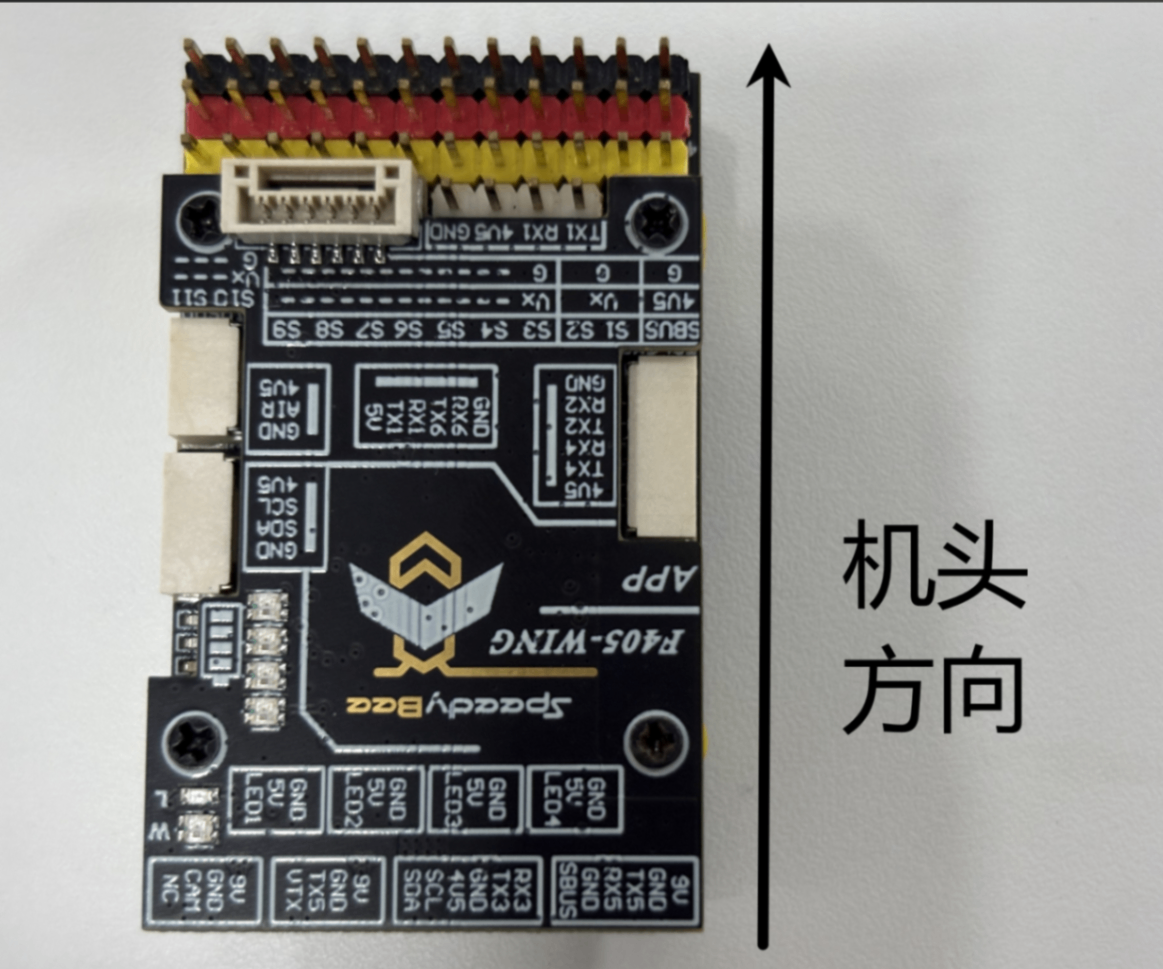
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)地面站: INAV地面站。
三、具体操作
方式 1:默认安装(标准朝向)
✅ 默认安装无需修改任何参数,飞控方向保持出厂设置。
方式 2:飞控上下倒装
✅ 适用于 受空间限制、需要翻转安装飞控的情况。
修改步骤:
进入 CLI 命令行模式(Configuration → CLI)。
输入以下命令:
set align_board_roll = 1800
save- 点击 “SAVE SETTING”,重启飞控,确保参数生效。
恢复默认设置:
若需恢复标准安装方向,可输入:
set align_board_roll = 0
save方式 3:飞控前后倒装(180° 旋转)
✅ 适用于 需要将飞控 前后旋转 180° 安装的情况。
修改步骤:
1.INAV 6.0 及以下:
- 进入 Configuration 页面,在 “飞控方向” 选项中更改 YAW(偏航)方向为 180°。
2.INAV 7.0 及以上(无界面选项):
- 进入 CLI 命令行模式,输入:
set align_board_yaw = 1800
save3.点击 “SAVE SETTING”,重启飞控,确保参数生效。
恢复默认设置:
若需恢复标准安装方向,可输入:
set align_board_yaw = 0
save结果验证
进入 INAV Configurator → “Setup” 页面,检查飞控方向是否正确匹配安装方式。
在 OSD 或地面站查看传感器反馈,手动倾斜飞控,确认 横滚、俯仰、偏航方向正确。
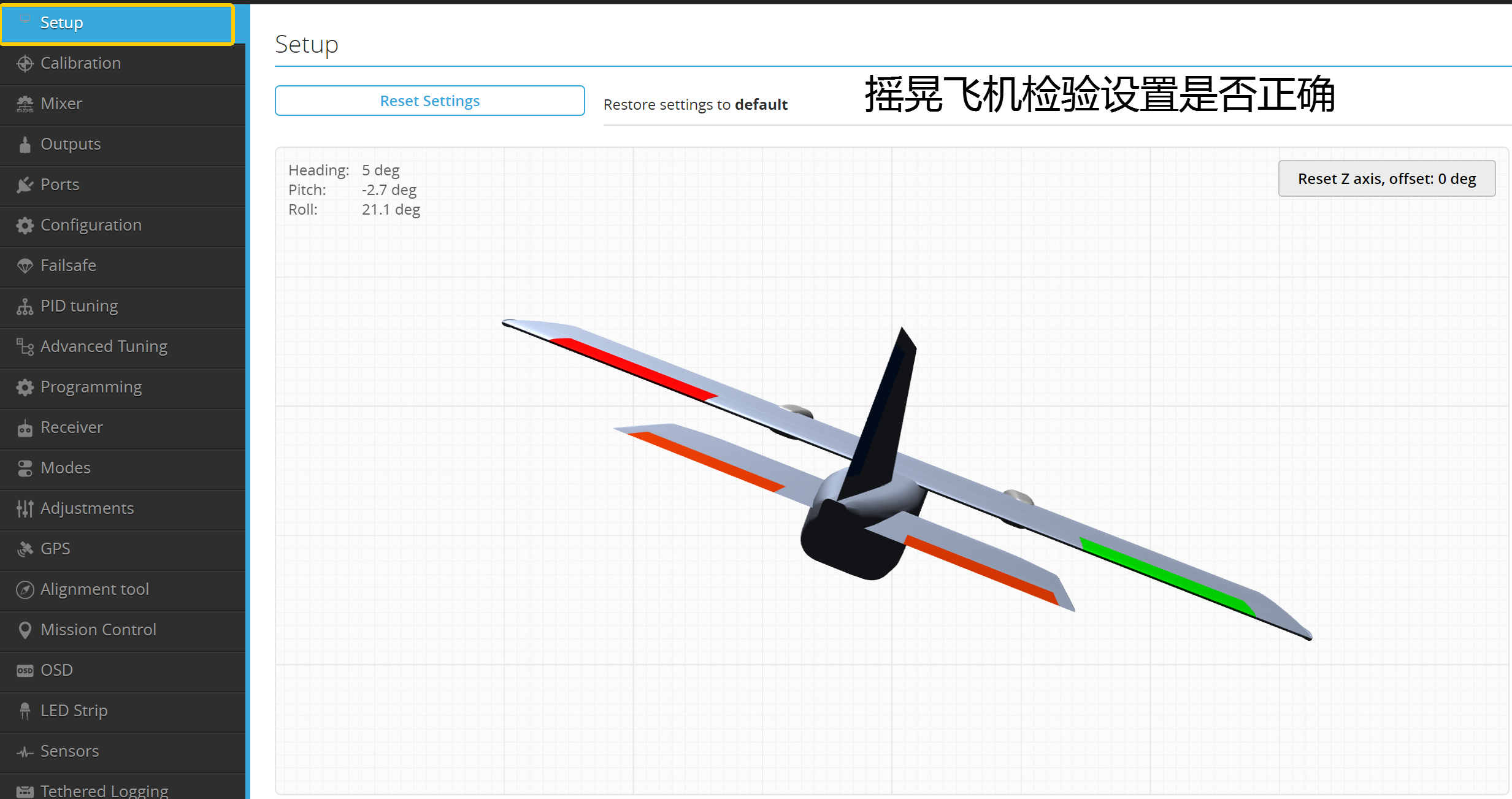
- 若传感器数据异常,可重新检查设置,并尝试重新输入 CLI 命令进行修正。
四、Q&A
技术支持二维码
