如何设置返航模式(RTH)
一、原理
返航模式(RTH) 用于将飞行器带回到起飞位置,或者如果启用了 SafeHome 功能,则返回安全起飞点。默认情况下,起飞位置是飞行器首次解锁的位置。 RTH 同时控制飞行器的位置和高度。如果飞行器没有高度传感器(如气压计),则需要手动控制高度。
在默认设置下,若飞行器距离起飞位置小于 5 米, RTH 将立即降落;若更远,则飞行器将确保至少达到 10 米的高度。固定翼飞行器将在巡航油门下飞回家,并根据设置盘旋或降落。多旋翼飞行器将以 3 米/秒的速度开始返航并最终降落。如果配置了自动解锁功能,飞行器将在着陆后自动解锁;如果未配置,需在着陆后手动解锁。
返航模式(RTH) 通过飞行模式中的 RTH 控制 激活,适用于多旋翼和固定翼飞行器,唯一的区别在于飞行器在盘旋过程中爬升或下降的方式。
二、基本设置
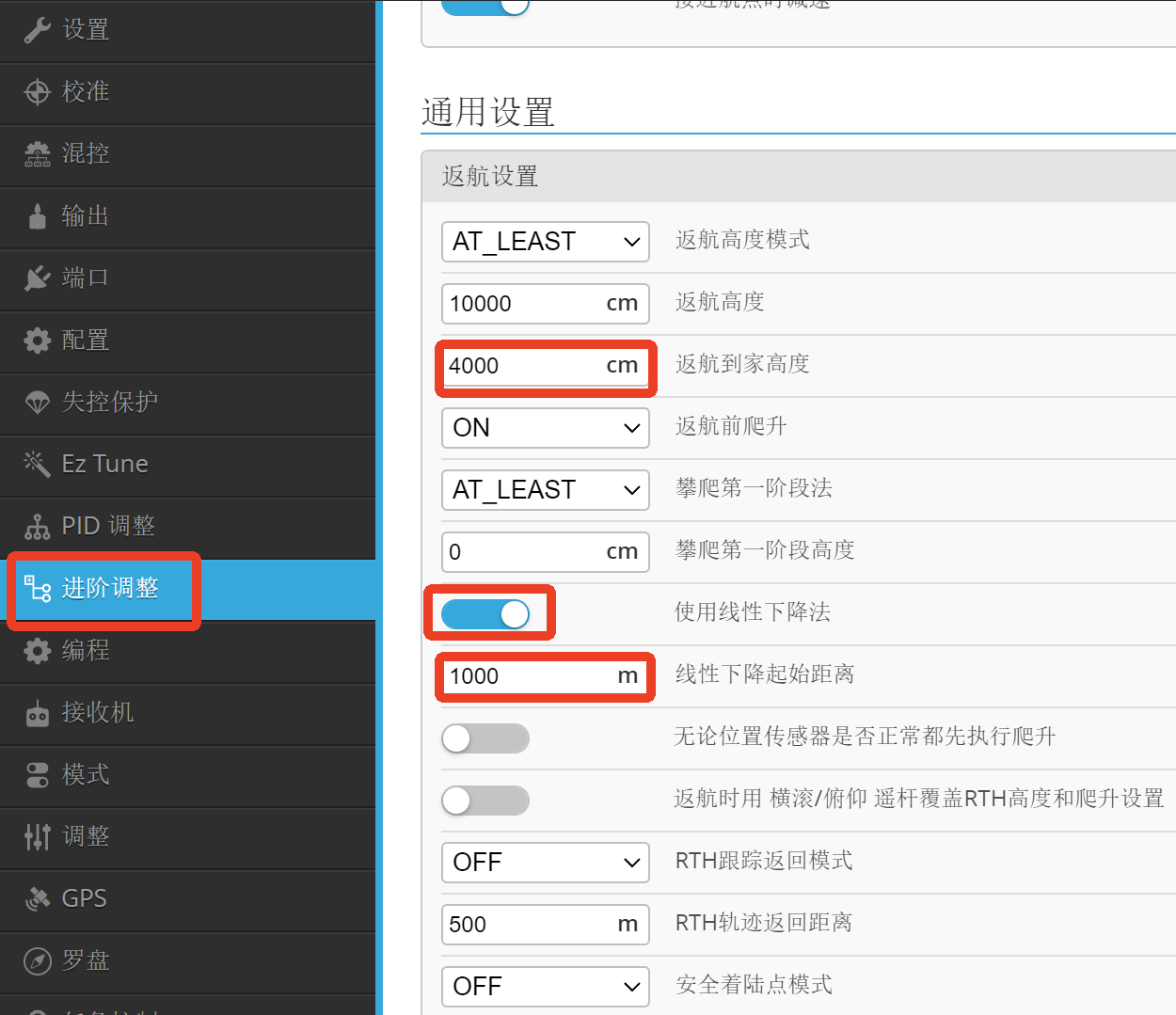
可参考以下参数进行快速设置使用:

三、具体说明
3.1 返航高度
返航高度模式( RTH altitude mode ) 有两个与高度相关的设置: 返航高度 ( RTH altitude ) 和 返航到家高度( RTH Home altitude )。
- 返航高度 ( RTH altitude ) 决定飞行器返航时的高度。这个设置决定了飞行器返航过程中需要保持的最低高度。
- 返航到家高度( RTH Home altitude ) 设置了飞行器到达起飞点时的盘旋高度。如果飞行器到达的高度高于 返航到家高度( RTH Home altitude ),飞行器将开始沿着下降螺旋盘旋,直到达到设定的返航高度。默认值为 0,表示该功能禁用。在这种情况下,若启用了线性下降,飞行器将按照 返航高度 ( RTH altitude ) 的高度进行盘旋。
这两个设置结合使用,可以精确控制飞行器返航时的高度和盘旋行为。
3.2 RTH 高度控制模式
RTH 可以通过几种不同的方式控制高度,这些方式由 返航高度模式( RTH altitude mode ) 和 返航高度 ( RTH altitude )(以厘米为单位的高度)参数控制。
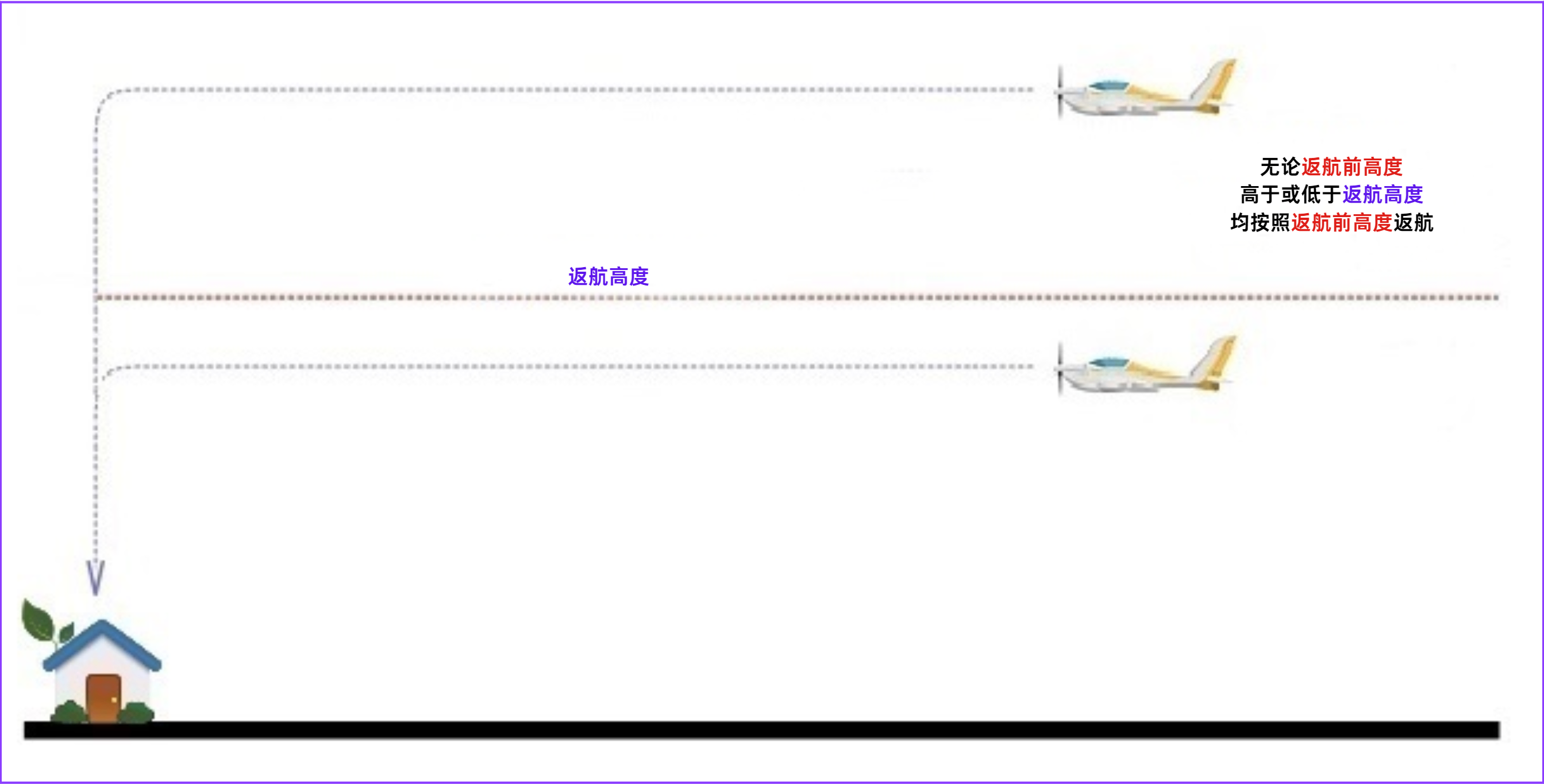
3.2.1 保持当前高度
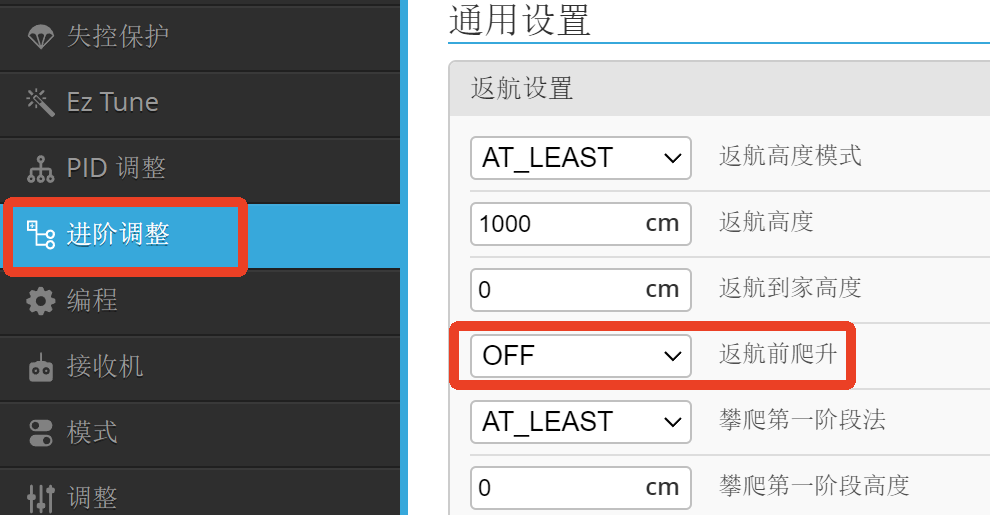
- 返航高度模式( RTH altitude mode ) 设置为 CURRENT
- 返航高度 ( RTH altitude ) - 无需设置
返航前的高度是飞行器返航时的高度,忽略任何 返航高度 ( RTH altitude ) 的设置。
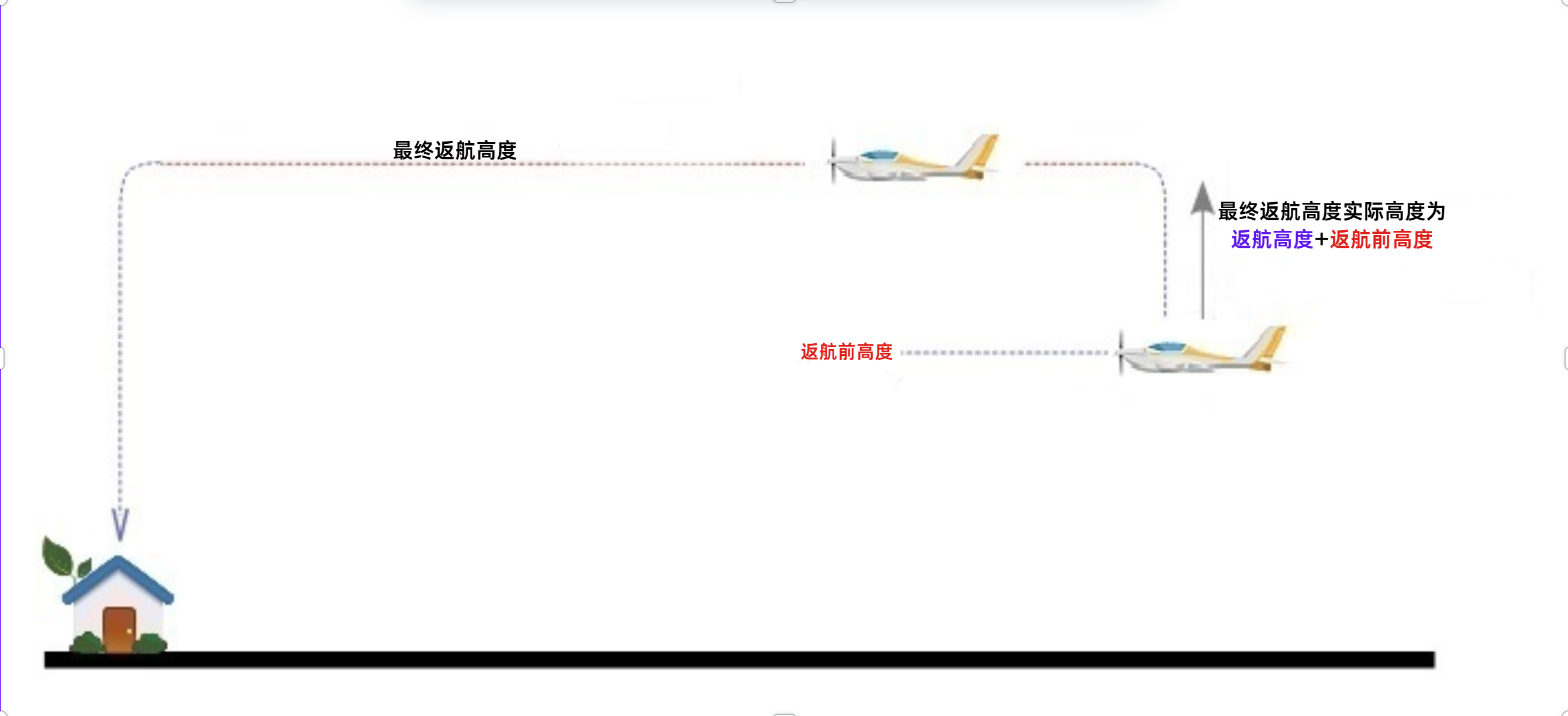
3.2.2 保持当前高度并增加定义的安全高度
- 返航高度模式( RTH altitude mode ) 设置为 EXTRA
- 返航高度 ( RTH altitude ) - 定义所需的额外高度
返航前的高度是飞行器当前飞行的高度,加上 返航高度 ( RTH altitude )。
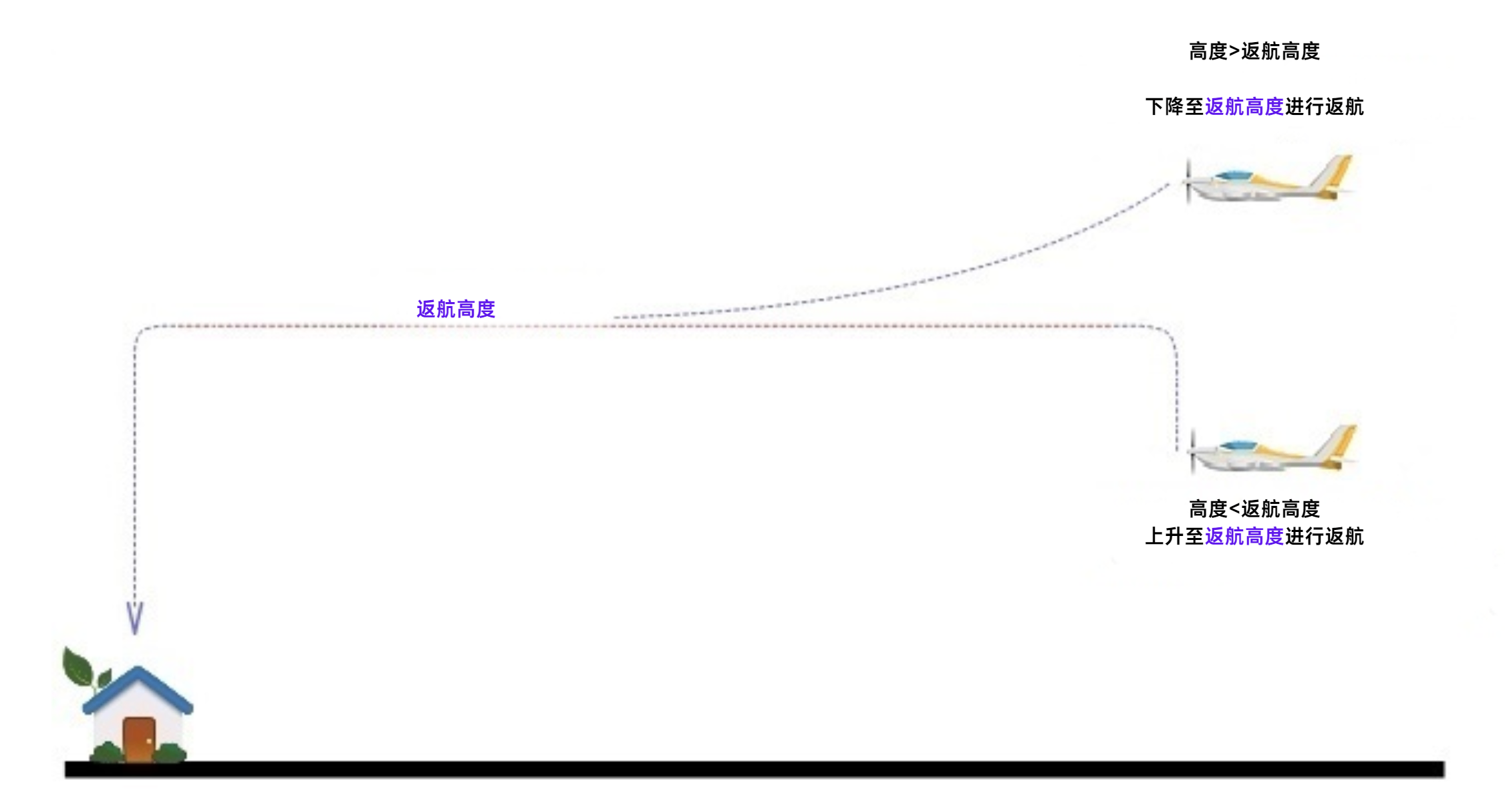
3.2.3 预定义高度
- 返航高度模式( RTH altitude mode ) 设置为 FIXED
- 返航高度 ( RTH altitude ) - 定义返航点上方的精确返航高度
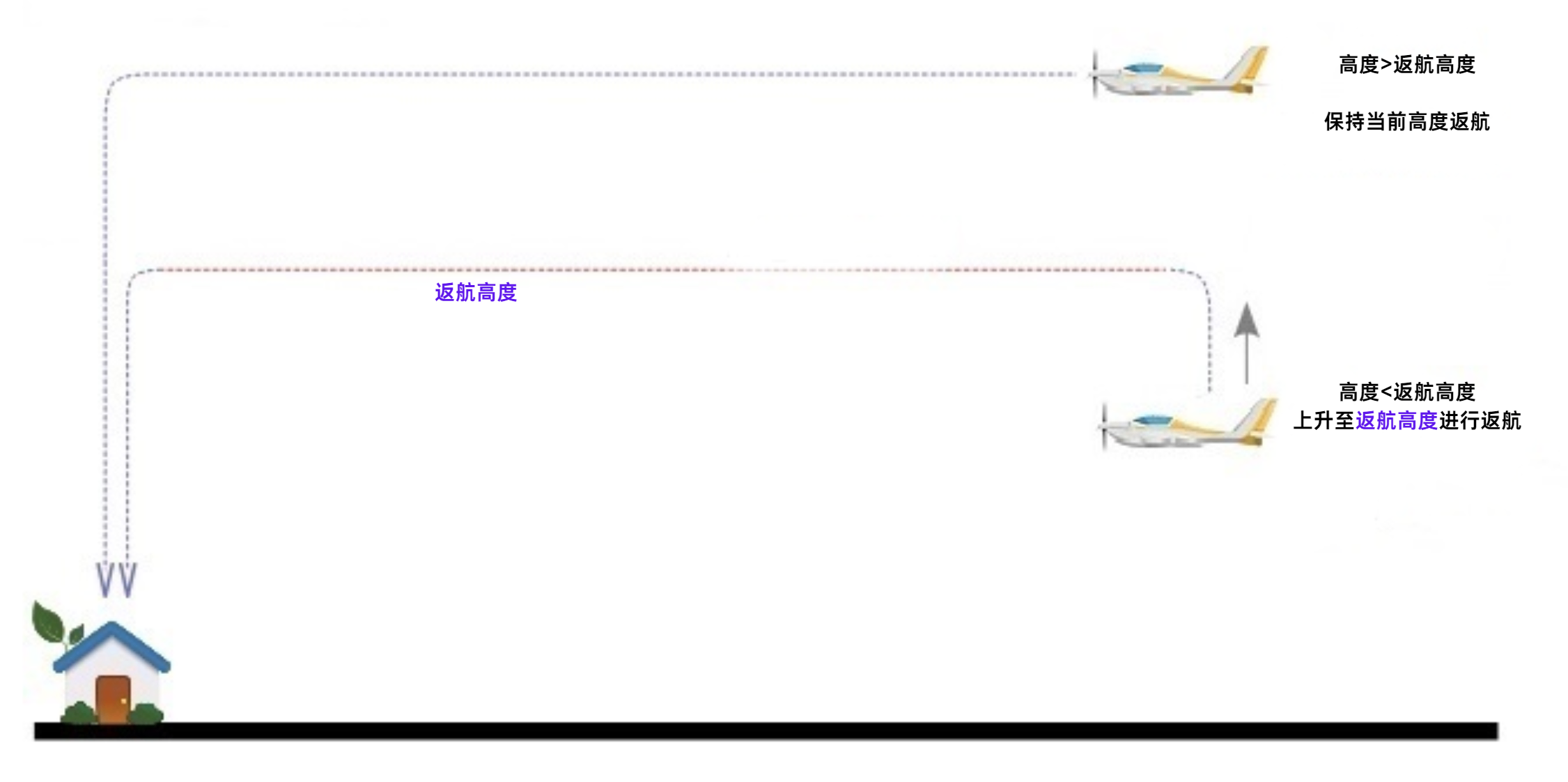
如果飞行器低于 返航高度 ( RTH altitude ),它将在返航之前爬升至所需高度。如果飞行器高于所需高度,它将在返航时下降。
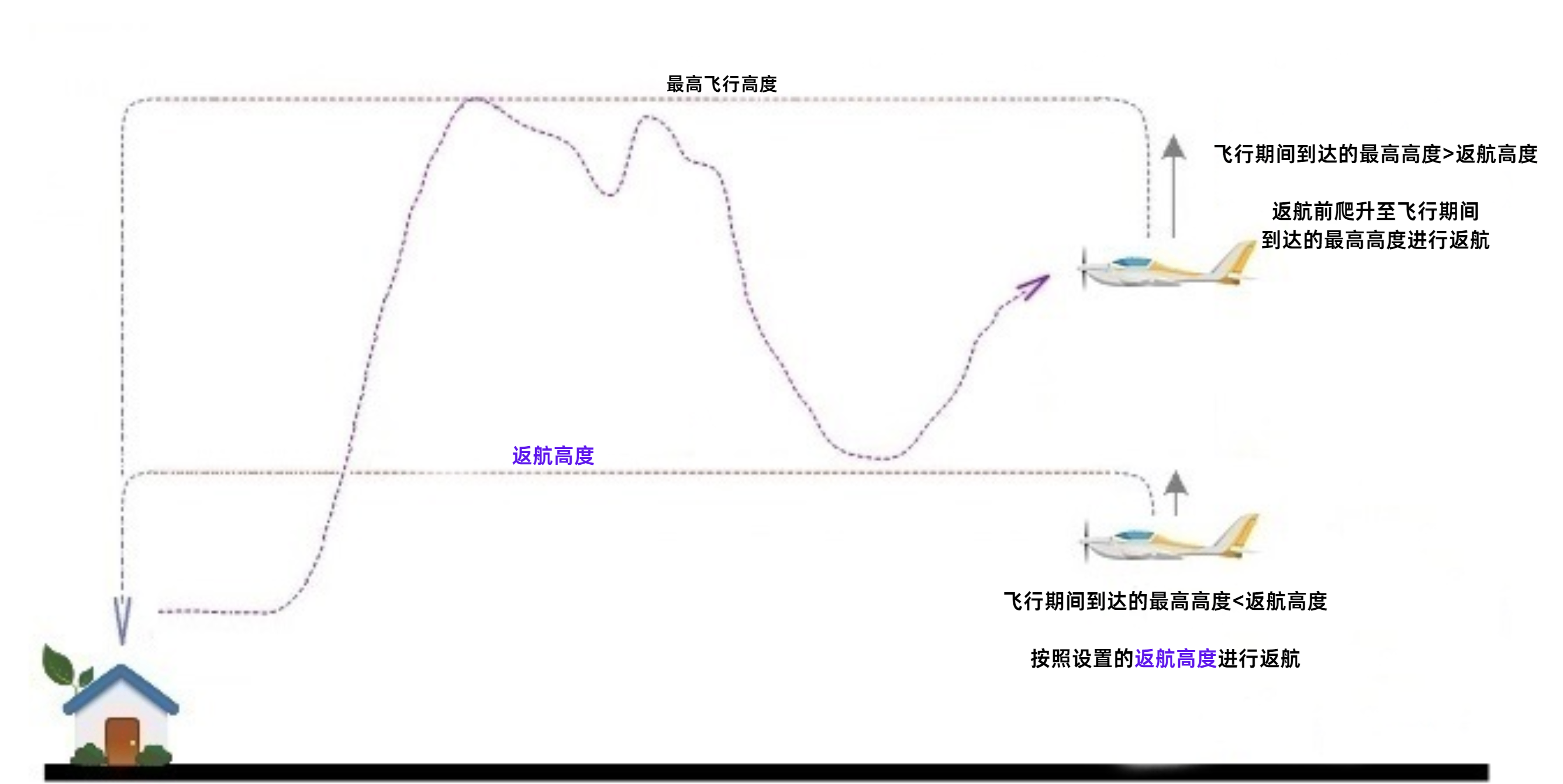
3.2.4 自起飞以来的最大高度
- 返航高度模式( RTH altitude mode ) 设置为 MAX
INAV 4.1以前的版本:
- 返航高度 ( RTH altitude ) - 定义返航点上方的精确返航高度
INAV 4.1以上版本:
飞行器将以自起飞以来的最高高度返航。如果飞行过程中未超过 返航高度 ( RTH altitude ) 的值,则以 返航高度 ( RTH altitude ) 的高度返航。如果 返航高度 ( RTH altitude ) = 0,则禁用该功能。
3.2.5 至少高于起飞点的预定义高度
- 返航高度模式( RTH altitude mode ) 设置为 AT_LEAST
- 返航高度 ( RTH altitude ) - 定义返航时高于起飞点的最低高度。
3.2.6 预定义高度线性下降
适用于INAV 7.0以前的版本:
- 返航高度模式( RTH altitude mode ) 设置为 AT_LEAST_LINEAR_DESCENT
- 返航高度 ( RTH altitude ) - 定义返航时高于起飞点的最低高度。
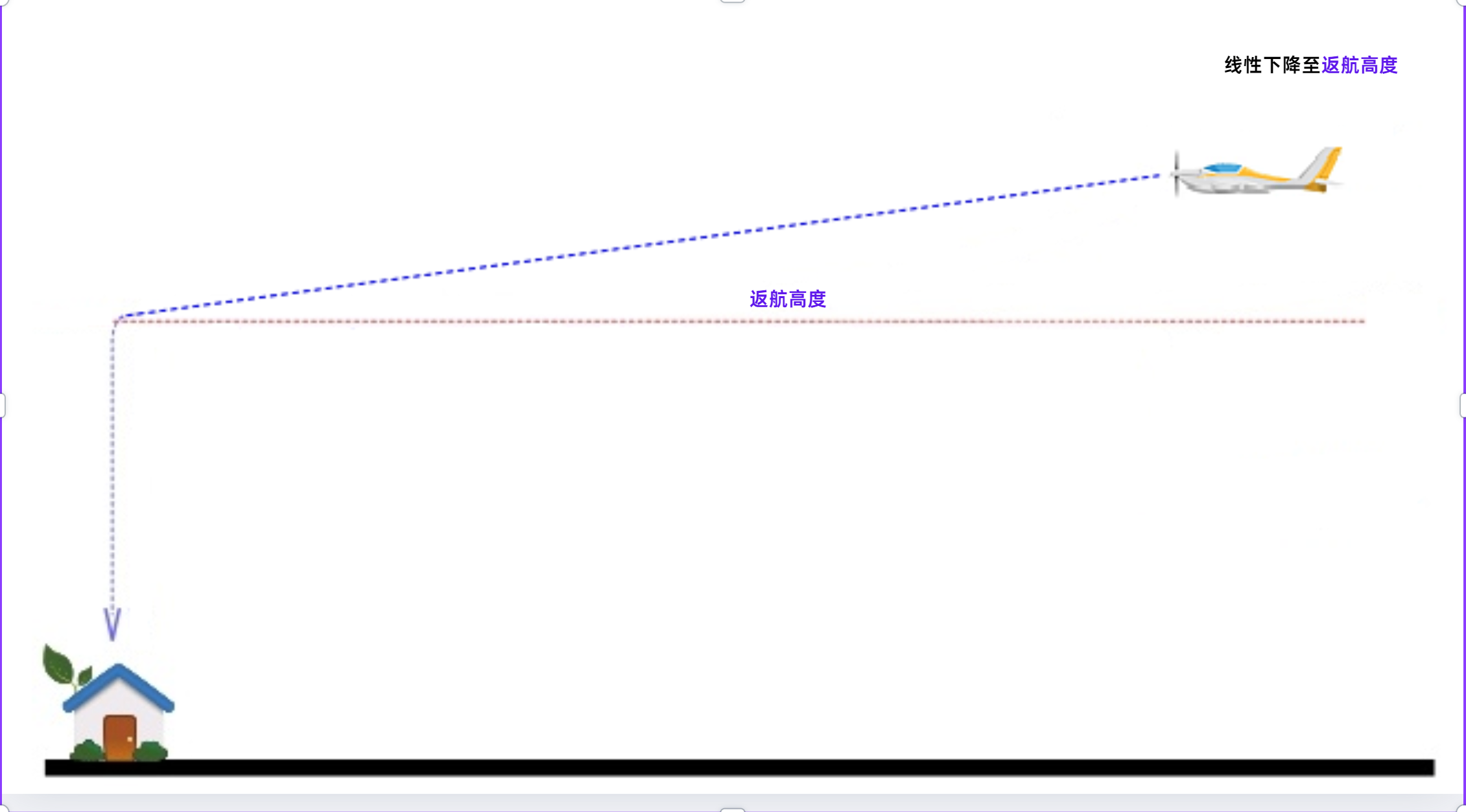
如果飞行器低于 返航高度 ( RTH altitude ),它将在返航之前爬升至所需高度。如果飞行器高于所需高度,它将在转向返航的同时逐渐下降(沿线性直线下降)。这定义了实际的 RTH 返航高度。飞行器将以一种方式下降,使其在到达返航点时正好达到 返航高度 ( RTH altitude )。因此,飞行器可以通过在返航途中平缓下降来节省能量。
3.3 线性下降(Linear Descent)
适用于 INAV 7.0 及以上版本
在 INAV 7.0 之前,线性下降是 AT_LEAST 模式的扩展版本。从 INAV 7.0 开始,线性下降可用于所有 RTH 返航模式,并且进行了扩展,以提供更多的飞行员控制选项。
由于所有 RTH 返航模式现在都可以使用线性下降,因此需要一个适用于所有 RTH 模式的目标下降高度。为此,线性下降的目标高度现在是 返航到家高度( RTH Home altitude )。必须设置此参数,线性下降功能才能生效。
3.3.1 RTH 返航高度低于 10m 时的警告
如果启用了 线性下降,并且 返航到家高度( RTH Home altitude ) 小于 10 米,则 RTH 返航高度输入框周围会显示警告。你仍然可以输入任何数值(包括 0),但你需要确保该数值在你的飞行环境中是安全的。 如果未设置 返航到家高度( RTH Home altitude ) ,则飞行过程中不会使用线性下降功能。

3.3.2 线性下降起始距离(Linear Descent Start Distance)
还添加了一个选项来设置线性下降的起始距离,这由 线性下降起始距离(Linear Descent Start Distance) 参数控制。
- 默认值为 0(保持当前行为)。当该值设为 0 时,进入 RTH 返航模式后立即开始线性下降。
- 你也可以指定一个 距返航点的距离(以米为单位,最大可达 10,000m,即 10km),飞行器将在达到该距离时开始线性下降。
- 在所有情况下,线性下降的目标是 在到达返航点时降至 返航到家高度( RTH Home altitude )(如果可能)。
尽管此功能仍称为 线性下降(Linear Descent),但在某些情况下(如飞行高度低于起飞点时),它可能会表现为 线性上升(Linear Ascent),即飞行器会爬升到返航到家高度( RTH Home altitude )。
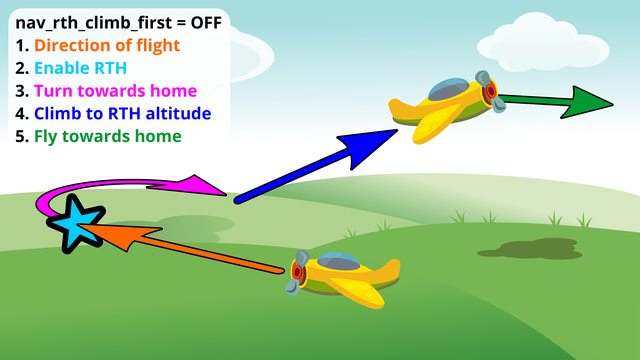
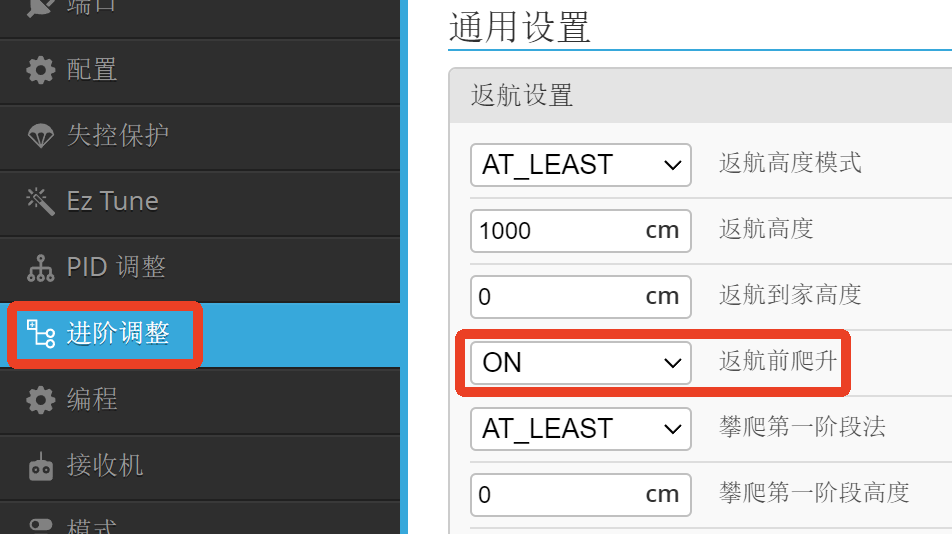
3.4 返航前先爬升(Climb before RTH)
3.4.1 关闭返航前先爬升功能
飞机将转向返航,并在返航过程中爬升至实际返航高度。
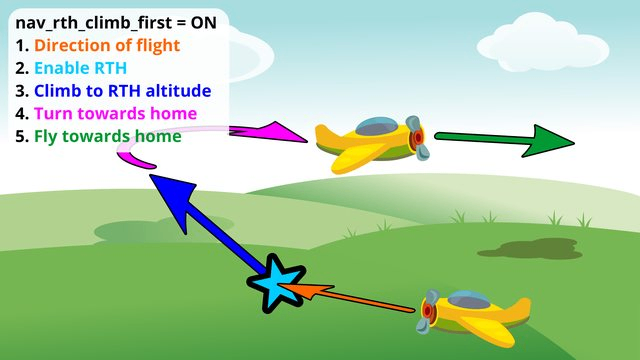
3.4.2 启用返航前先爬升功能
飞机沿当前飞行方向爬升至实际 RTH 高度。一旦达到实际返航高度,它将转向并飞向原点。
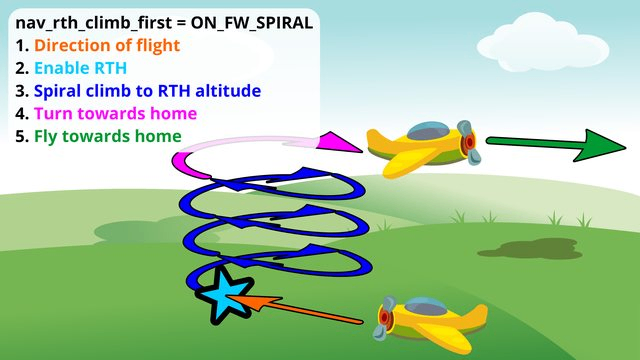
3.4.3 螺旋爬升返航
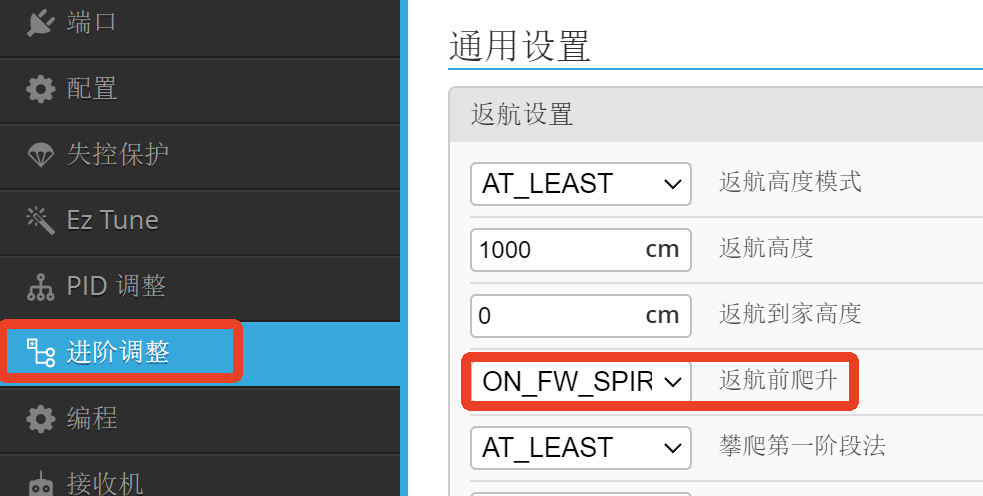
以螺旋方式爬升 到 返航高度,再执行返航。
3.4.4 两个阶段爬升
攀爬第一阶段爬升法(Climb First Stage Method) 设置为AT_LEAST
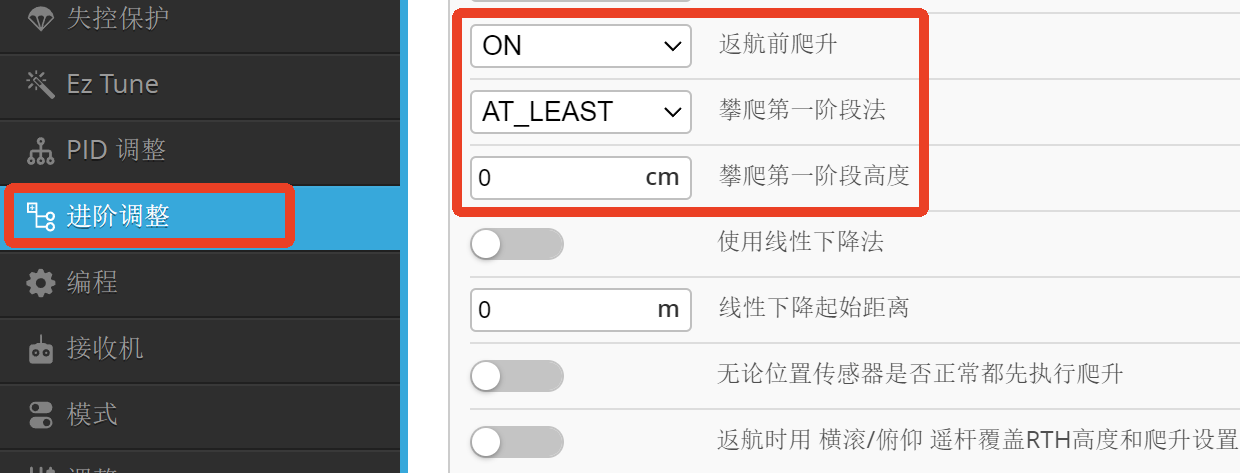
此设置的工作方式与 RTH 模式相同。第一阶段的目标高度由 攀爬第一阶段高度( Climb First Stage Altitude ) 设定。如果当前高度低于该值,飞行器将先爬升至此高度;否则,它将直接进入返航模式。
飞行器随后会执行以下行为之一:
- 若已达到 RTH 目标高度,则立即转向返航点。
- 若未达到 RTH 目标高度,则在返航途中继续爬升,直到达到设定高度。
这样可以确保飞行器在返航过程中安全避障,同时优化飞行路径。
攀爬第一阶段爬升法(Climb First Stage Method) =EXTRA
同样,此设置的工作方式与 RTH 模式类似。第一阶段的目标高度为 当前高度 加上 攀爬第一阶段高度( Climb First Stage Altitude ) 设定的值。
飞行器的行为如下:
- 如果当前高度低于 RTH 目标高度,则会先爬升至第一阶段的高度。
- 如果当前高度已满足第一阶段高度要求,则直接进入返航模式。
- 返航途中,若尚未达到 RTH 目标高度,飞行器将在返航过程中继续爬升。
- 如果在第一阶段已达到 RTH 目标高度,则立即转向返航点。
这种方式确保了飞行器在返航时安全避障,并优化返航路径,提高飞行效率。
3.5 其他设置
返航轨迹模式(Trackback)

RTH 返航轨迹模式 会记录飞行器的最近飞行轨迹,当触发 RTH 返航时,它将沿着记录的轨迹返回,而不是直接返回起飞点。该功能主要用于在 接收机信号因视线遮挡而丢失 时,让飞行器返回到信号可以恢复的位置。这种方式相比直接返航 可以提高信号恢复的可能性,同时降低飞行器撞上障碍物的风险。
工作机制:
- 触发 返航轨迹模式 (Trackback) 返航后,飞行器将沿着记录的轨迹返回,直到到达记录轨迹的起点,然后再转为普通 RTH 模式,直接飞回起飞点。
- 在 返航轨迹模式(Trackback) 过程中,飞行器不会执行普通 RTH 的 起始爬升阶段,而是使用 轨迹记录点的高度(但不会低于触发 Trackback 时的高度,即 Trackback 过程中始终保持最低高度)。
- 目前 返航轨迹模式(Trackback) 最多允许 50 个轨迹点,如果轨迹点的分布允许,最大轨迹返回距离可达 2000 米。
- 需要注意的是,这里的 距离是指触发 返航轨迹模式(Trackback) 时的位置到当前飞行器位置的直线距离,而不是沿轨迹点的累计距离。该功能的主要目的是 在触发普通 RTH 返航前,限制飞行器的远离距离。
参数设置:
RTH跟踪返回距离( RTH Track Back Distance ):用于设定 Trackback 返航的最大距离。
RTH跟踪返回模式( RTH Track Back Mode ):控制 Trackback 模式的使用,可选值:
- OFF(关闭)
- ON(正常 RTH 和失控保护 RTH 时均启用)
- FS(仅在失控保护 RTH 时启用)
终止 Trackback 返航:
- Trackback 返航可以通过“RTH 高度控制覆盖”命令取消,取消后,飞行器将切换回普通 RTH 模式,并直接飞回起飞点。
- 需要设置 _横滚/俯仰 遥杆覆盖RTH高度和爬升设置(Override RTH altitude and climb setting with roll/pitch stick)_才能启用此功能。
RTH 高度控制覆盖

可以使用返航时用_横滚/俯仰 遥杆覆盖RTH高度和爬升设置(Override RTH altitude and climb setting with roll/pitch stick)_参数,在初始 RTH 返航爬升阶段 覆盖默认的 RTH 返航高度和优先爬升设置。
手动紧急降落(适用于固定翼和多旋翼)
手动紧急降落 允许飞行员在必要时手动触发紧急降落。
操作方法:
- 快速切换 POSHOLD 模式开关至少 5 次(频率至少 1Hz,即每秒切换一次)。
- 触发后,飞行器将 开始下降 并保持在触发时的位置上方。
- 失控保护(Failsafe)模式在手动紧急降落期间被禁用,即使 RX 信号丢失,降落过程仍会继续。
- 如果要取消手动紧急降落,必须在进入 Failsafe 模式前完成取消操作。
- 还可以通过 多功能实用工具 触发手动紧急降落。
技术支持二维码
