如何使用自动模式进行航点飞行
2025/7/21大约 2 分钟
一、原理
航点飞行(Waypoint Mission)是一种自动飞行模式,飞控系统根据 预设航点 自动导航飞行器,并按照设定的飞行路径执行任务。该模式适用于 测绘、巡检、航拍 等场景。飞控会依据 GPS 信号 进行航点导航,并按照设定的高度、速度和盘旋参数进行飞行。
二、设备准备
硬件设备
- 飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
- GPS 模块: 用于提供精准定位,如BZ-251。
- 遥控器: 用于手动控制航点模式切换。
- 地面站软件: INAV Configurator。
三、具体操作
步骤 1:检查 GPS 状态
- 连接飞控并上电,确保 GPS 信号正常,OSD 显示 定位成功。
2.在地面站软件中,查看 地图上是否显示飞机位置,如果 GPS 未锁定,请等待 GPS 定位完成。
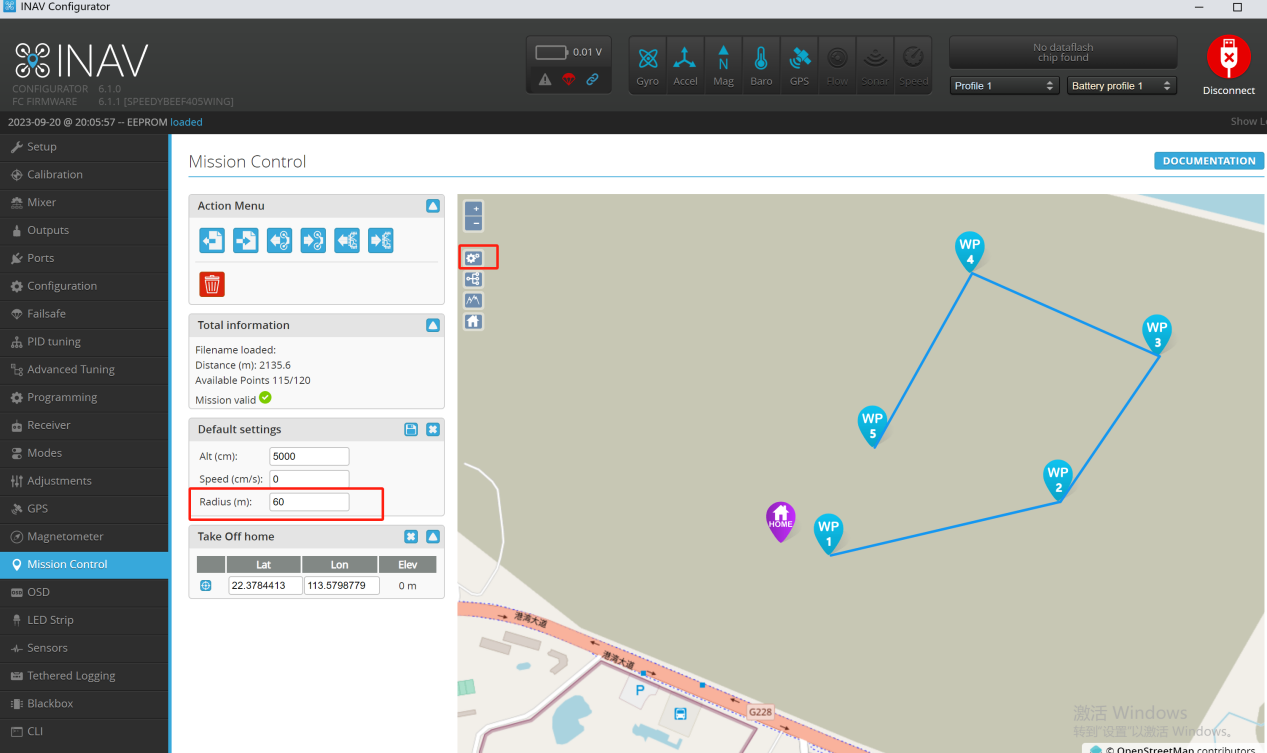
步骤 2:设置航点
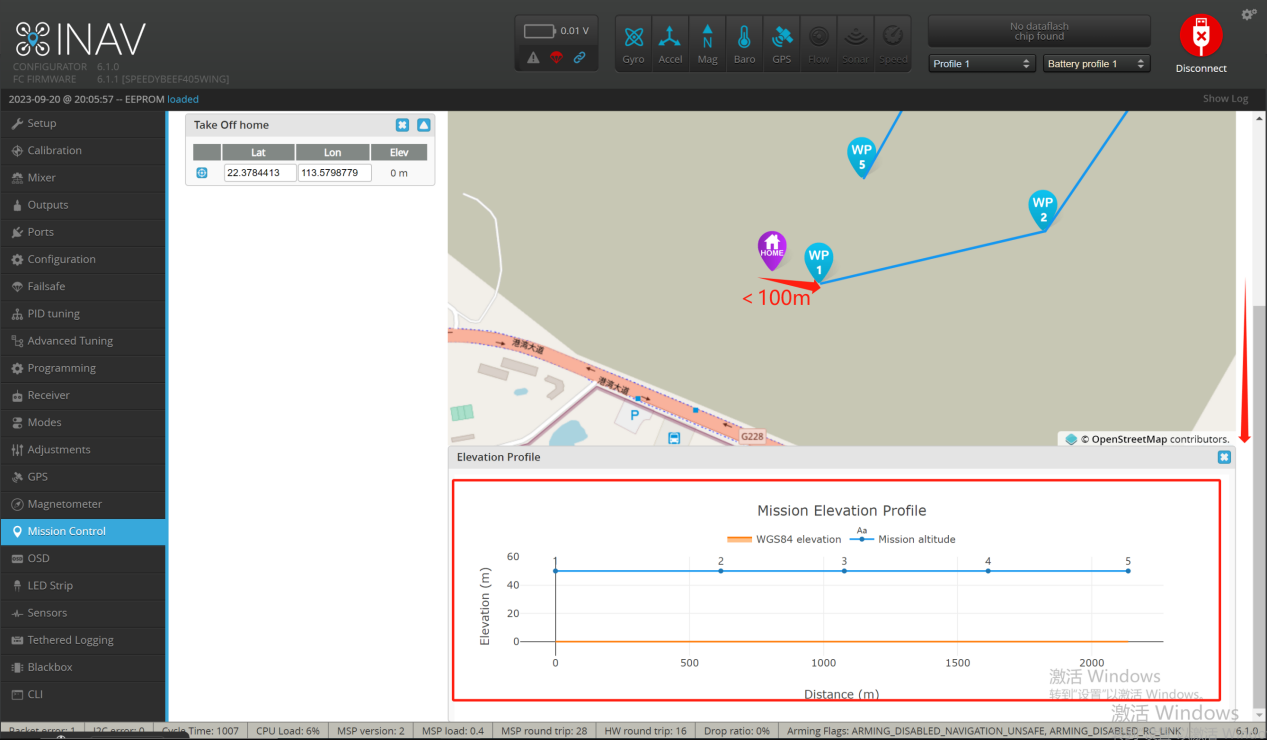
- 确认 HOME 点到航点 1 的距离,确保不超过 航点安全距离。
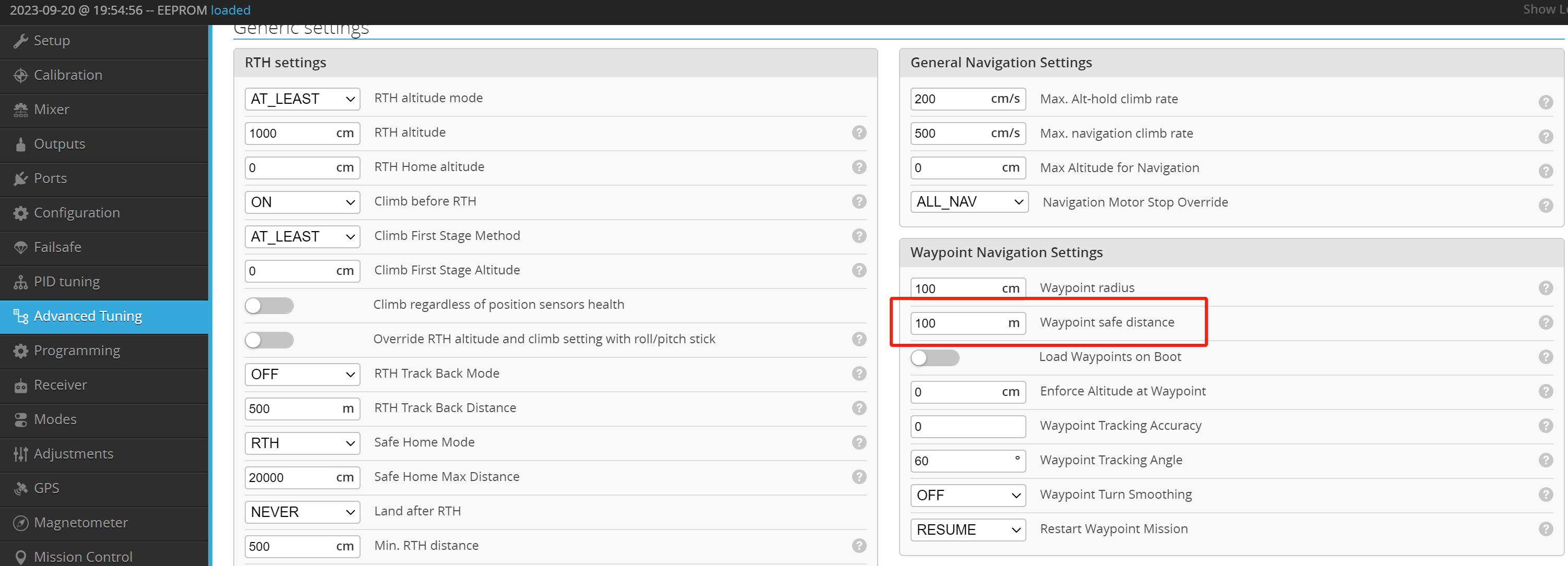
- 调整航点高度,确保所有航点均设在 安全高度 以上,避免 RTH 触发返航。
- 检查航点盘旋半径:
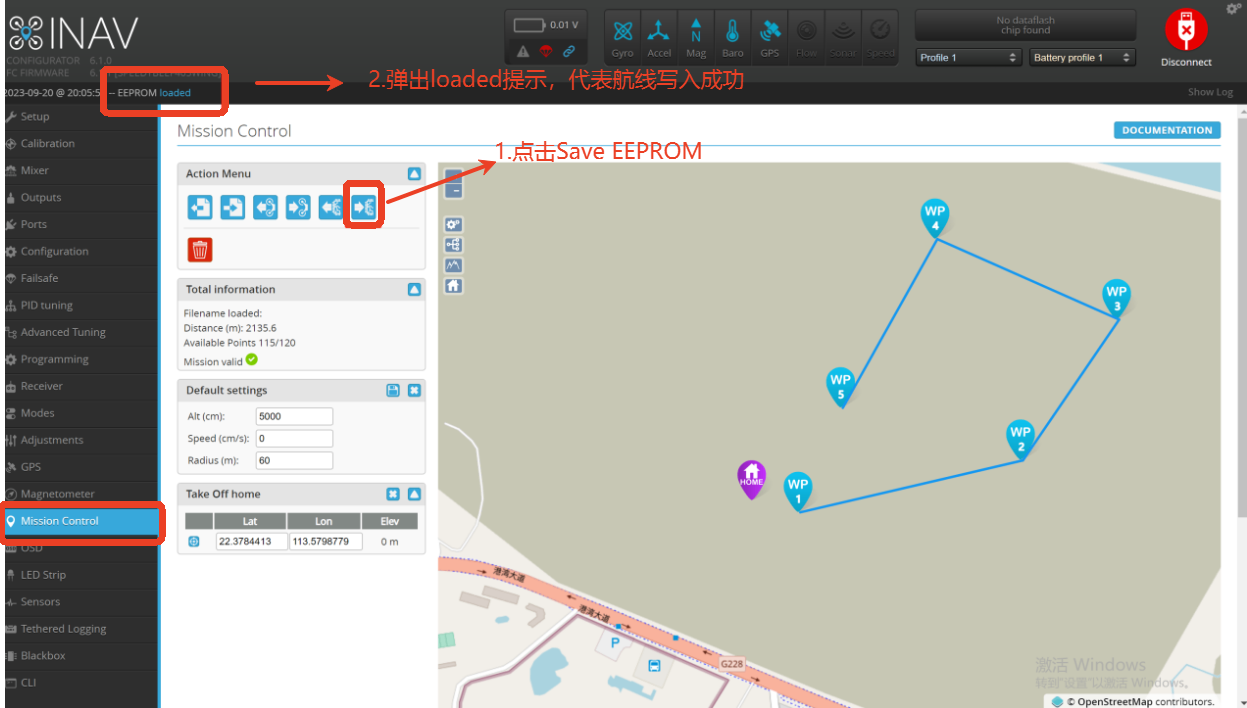
步骤 3:保存航点数据
1.点击 “Save EEPROM”,将航点数据保存到飞控。
- 检查左上角是否弹出“LOAD”提示,确保航点数据成功写入。
- 按照以下顺序进行航点数据管理:
- 先从 EEPROM 导出航点数据,确保航点设置正确。
- 确认航点无误后,再导入飞控。
- 等待左上角弹出“End send point”提示,表示航点成功写入。
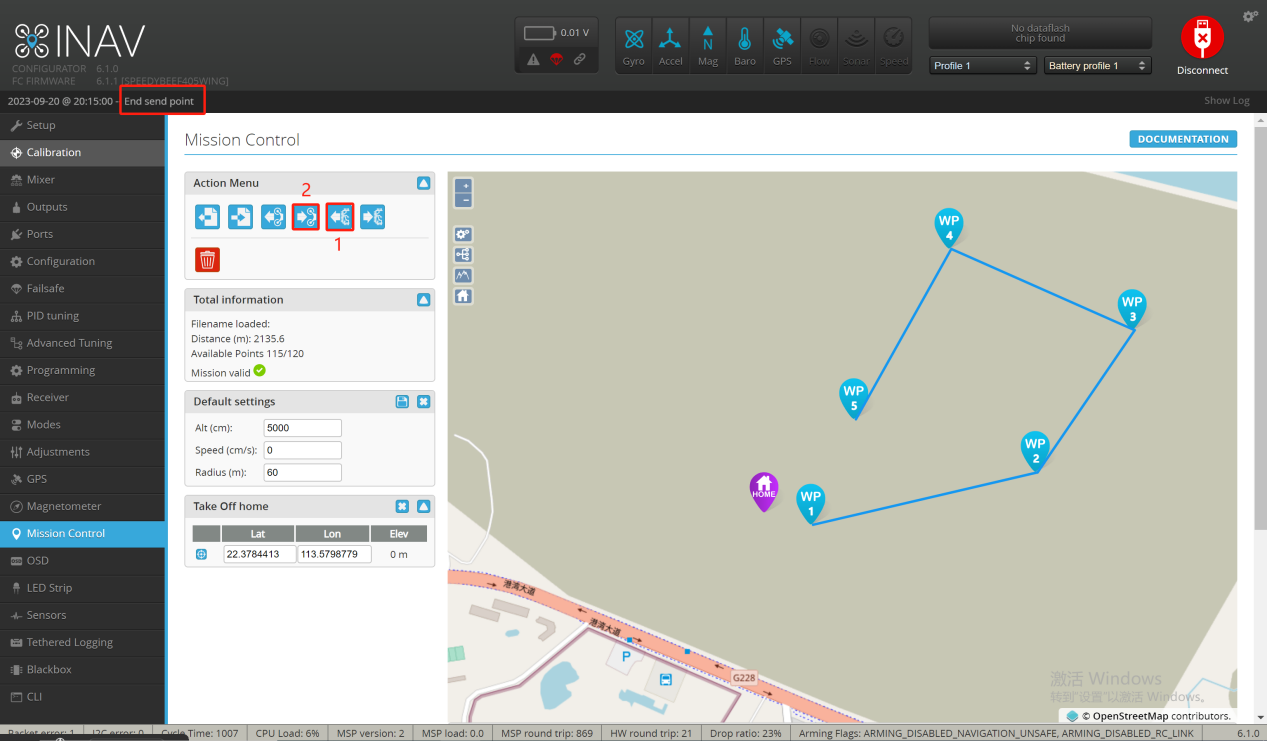
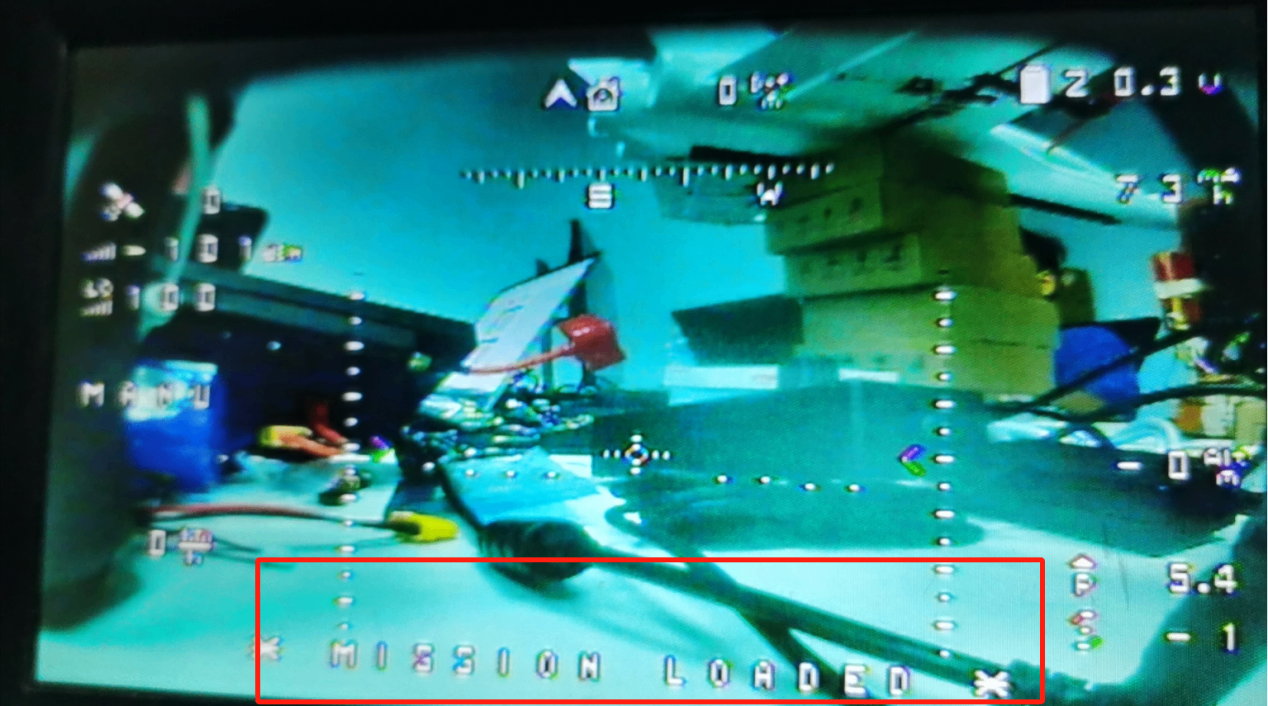
- OSD 显示 Mission Load,表示航点任务已成功加载。
步骤 4:执行航点飞行
正常抛飞,确保飞机稳定飞行。
在航点 1 附近手动切换至航点模式(Mission Mode)。
飞控自动导航飞行器进入任务模式,开始按设定的航点飞行。
四、Q&A
技术支持二维码
