如何设置舵机云台通道输出-INAV固件
2025/5/22大约 2 分钟
一、原理
为了提升 FPV 体验,许多玩家会使用 头部追踪(Head Tracking)模块,使摄像头云台能够随头部转动而调整视角。大多数头追模块通过 PWM 信号 连接遥控器,并由遥控器转发至接收机,最终传输至飞控,再由飞控输出至云台舵机,实现视角同步。
二、设备准备
硬件
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)遥控器: Radiomaster TX16S 遥控器/Radiomaster Boxer 遥控器 为例。
3)接收机 :SpeedyBee ELRS Nano 2.4G 为例。
4)电脑: 用于使用电脑地面站配置参数。
5)舵机云台: 支持 PWM 控制 的两轴或三轴云台。
6)头追模块:支持 PWM 信号输出 的设备。
软件
INAV地面站
三、具体设置
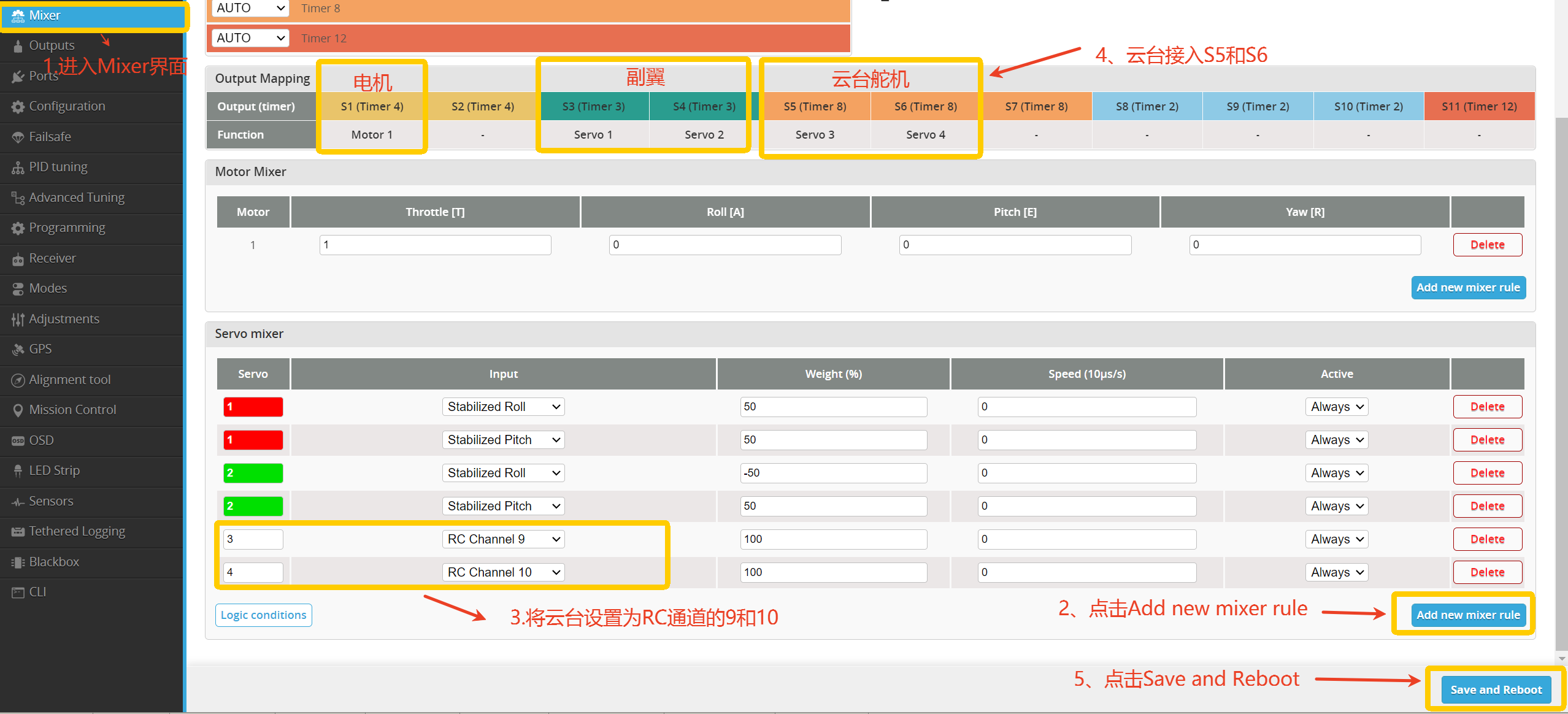
步骤 1:配置 MIXER
1.打开 INAV Configurator,进入 “MIXER” 页面,下面以无尾翼的单发固定翼为例。
- S1 → 连接电机
- S3、S4 → 连接副翼
- S5、S6 → 连接云台舵机
2.增加云台控制通道:
在 “Servo Mixer” 页面,添加 两条新通道:
- 输入通道 9 → 控制 俯仰(Pitch)
- 输入通道 10 → 控制 偏航(Yaw)
点击 “Save and Reboot” 保存并重启飞控。
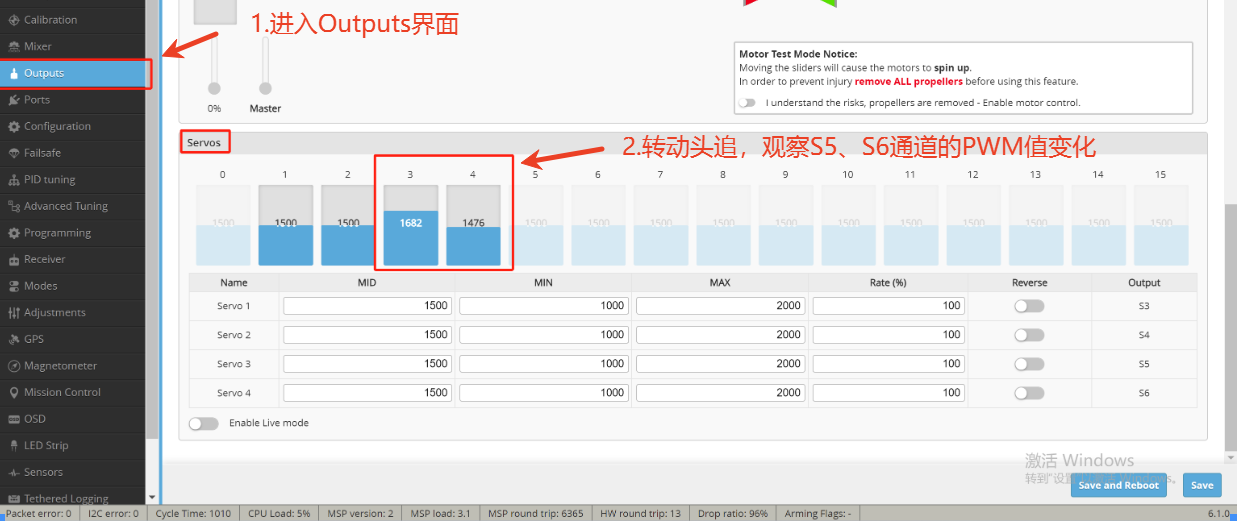
步骤 2:检查通道输出
- 进入 “OUTPUTS” 页面,向下滚动至 “Servo” 区域。
- 通过 转动头追模块,观察 S5、S6 通道的 PWM 输出值 是否变化。
步骤 3:排查问题
如果没有输出,请进入 “Receiver” 页面,检查 通道 9、10 是否随着头追模块的转动而发生数值变化。
- 若通道数值有变化:可能是 “MIXER” 设置错误,请重新检查映射是否正确。
- 若通道数值无变化:可能是 头追模块与遥控器连接异常,请确认连线正确,并检查遥控器是否正确配置了 9、10 通道 输出。
如果输出正常,将 舵机云台和头追模块安装到飞机上,通电后测试云台控制方向,排除接线和反向问题。
- 若低头时云台向左转:说明 云台俯仰和偏航舵机的连线接反, 交换两根舵机线 即可。
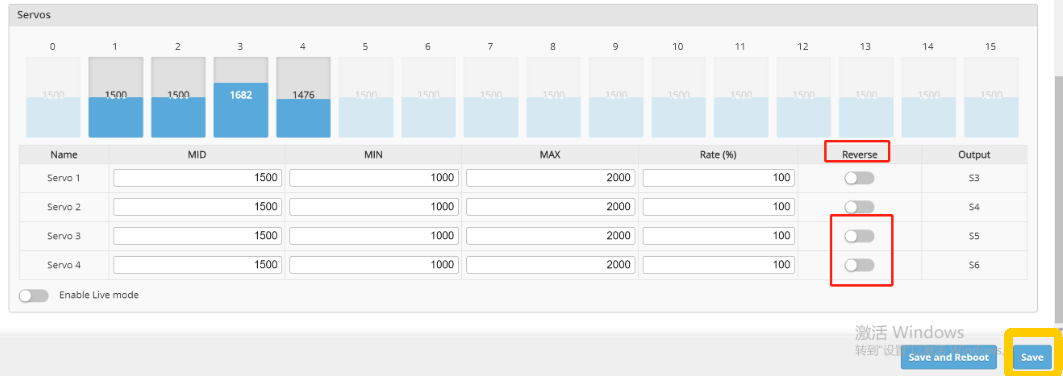
- 若低头时云台向上转:说明 舵机方向反向,可在 “OUTPUT” 界面勾选“Reverse” 反向开关进行修正,并点击保存。
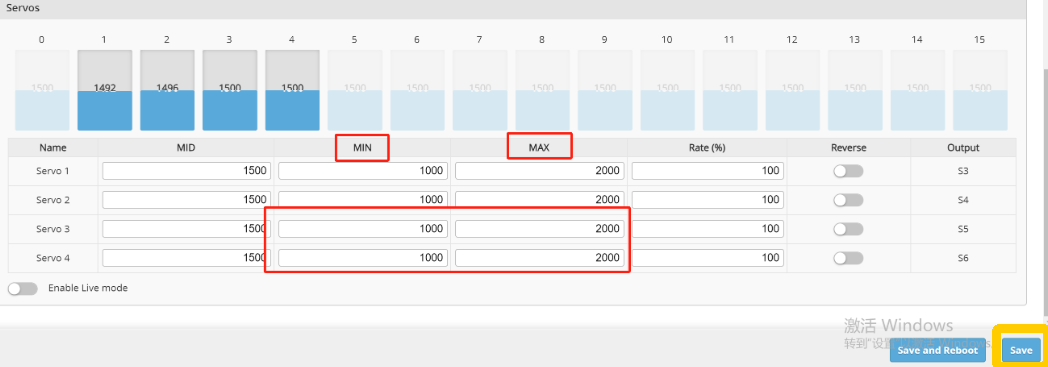
- 如果行程不足: 请调整 OutPut 的 MAX\MIN 值,并点击保存。
四、Q&A
技术支持二维码
