INAV遥控器拨杆模式说明
一、原理
在使用 INAV 固件 时,可以通过特定的 遥控器遥杆手势 来切换不同的模式。通过这种方式,用户可以便捷地切换设置和进行必要的调整,无需频繁使用地面站。
二、设备准备
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程
2)遥控器: Radiomaster TX16S 遥控器/Radiomaster Boxer 遥控器 为例
3)接收机 :SpeedyBee ELRS Nano 2.4G 为例
4)FPV眼镜或屏幕
5)图传: 高清图传或模拟图传
三、具体操作
Mode1(日本手) 和 Mode2(美国手)
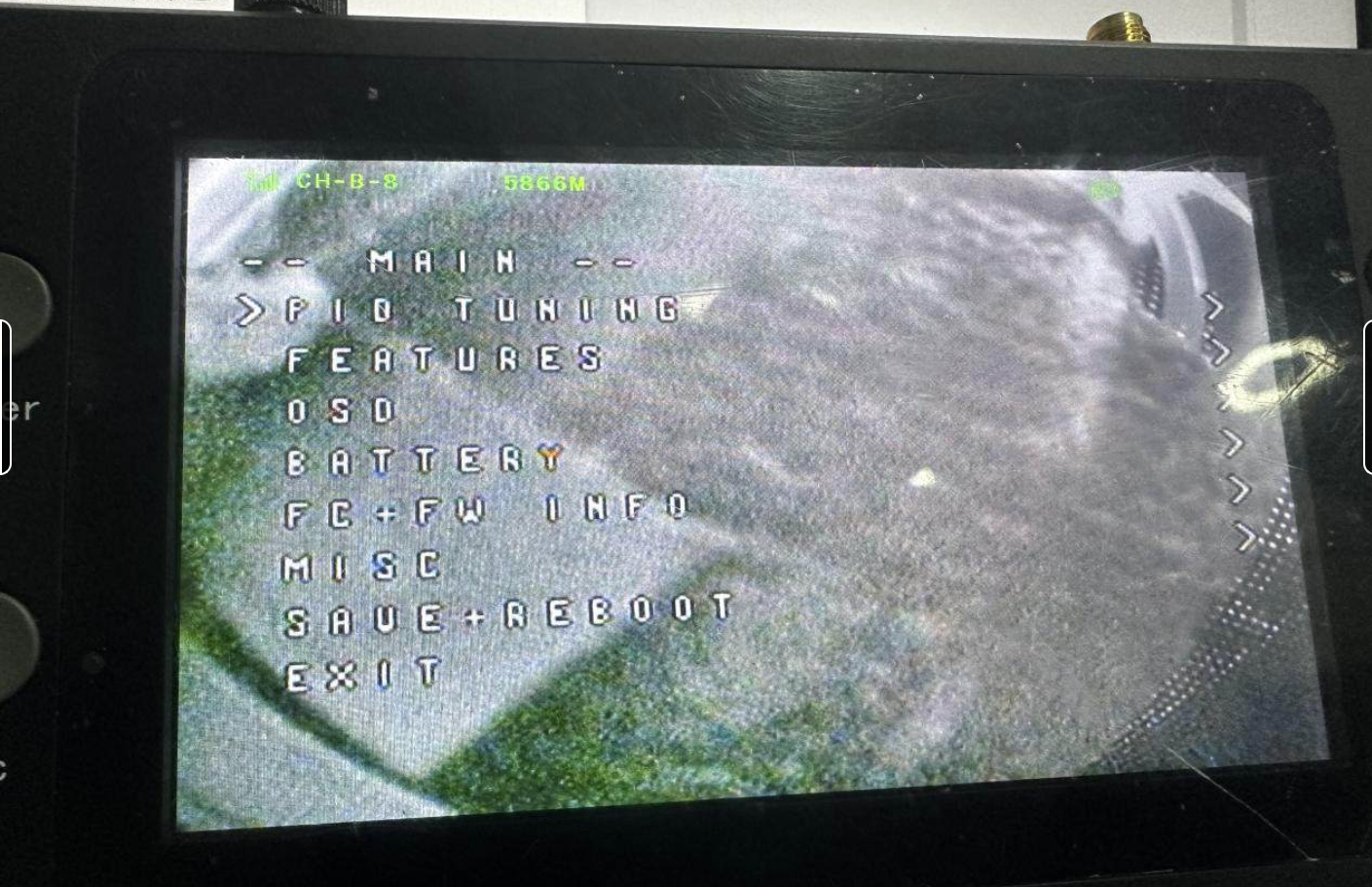
进入OSD菜单:

保存设置:

载入航点:

保存航点:

卸载航点:

配置1:

配置2:

配置3:

电池配置1:

电池配置2:

电池配置3:

校准陀螺仪:

校准加速度计:

校准罗盘:

左平衡校准:

右平衡校准:

前倾平衡校准:

后仰平衡校准:

注意:
1.在进行舵面测试时,注意遥控器操作,避免意外模式切换,保持飞行器稳定。
2.在未解锁的情况下进行舵面测试时,如出现舵面卡顿,可能是触发了特定摇杆组合,导致误入OSD菜单(CMS),这是正常现象。通过OSD屏幕确认是否成功进入设置模式。
3.Trim ACC只针对多轴可用, 如Trim Acc Left是将加速度计向左微调。
了解固件操作步骤和特性至关重要,如有问题可查阅文档或寻求官方帮助:
https://www.mrd-rc.com/tutorials-tools-and-testing/inav-flight/inav-stick-commands-for-all-transmitter-modes/\](https://www.mrd-rc.com/tutorials-tools-and-testing/inav-flight/inav-stick-commands-for-all-transmitter-modes/
四、Q&A
技术支持二维码
