如何解决自稳模式舵量小,转弯半径过大的问题
2025/5/22大约 2 分钟
一、现象
在 自稳模式(ANGLE 模式) 下,飞机 横滚角度较小,导致 转向迟缓,转弯半径过大,难以进行紧凑的飞行机动。
二、原因分析
1.INAV 默认限制最大横滚角度
- INAV 固件默认参数保守, 最大横滚/俯仰/航向角度 通常设定为 30°~40°,以确保飞行稳定性,防止过度倾斜导致失控。
- 该角度限制 直接影响转向能力,角度过小会使飞机 转弯半径增大。
2.前馈值较小
- 前馈值小 使得飞行器在接收到控制指令后, 姿态调整不够迅速,无法快速达到所需的横滚角度,影响转向性能。
三、解决办法
方法 1:增大最大横滚/俯仰角度
✅ 适用于 需要缩小转弯半径、提升机动性的情况。
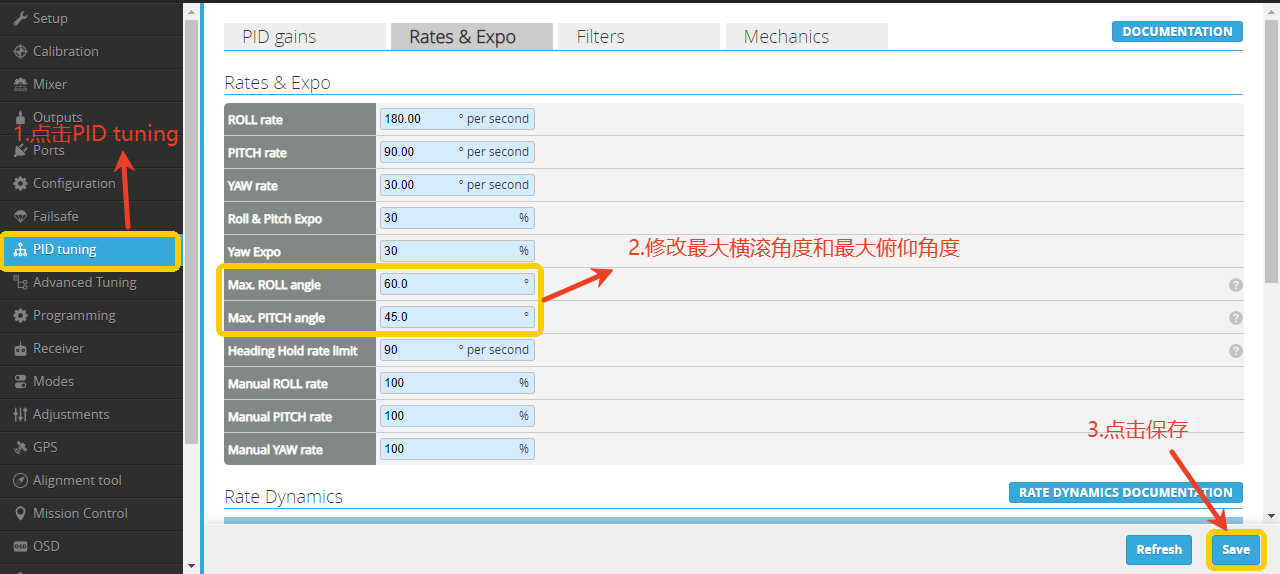
进入 INAV Configurator,打开 “PID Tuning” → “Rates & Expo” 页面。
建议调整以下参数:
- Max. ROLL angle(最大横滚角度): 60°
- Max. PITCH angle(最大俯仰角度): 45°
- 点击“保存”,并进行试飞测试。
方法 2:增加前馈值,提高舵面响应
✅ 适用于 需要改善操控手感,使飞机对摇杆输入更敏感的情况。
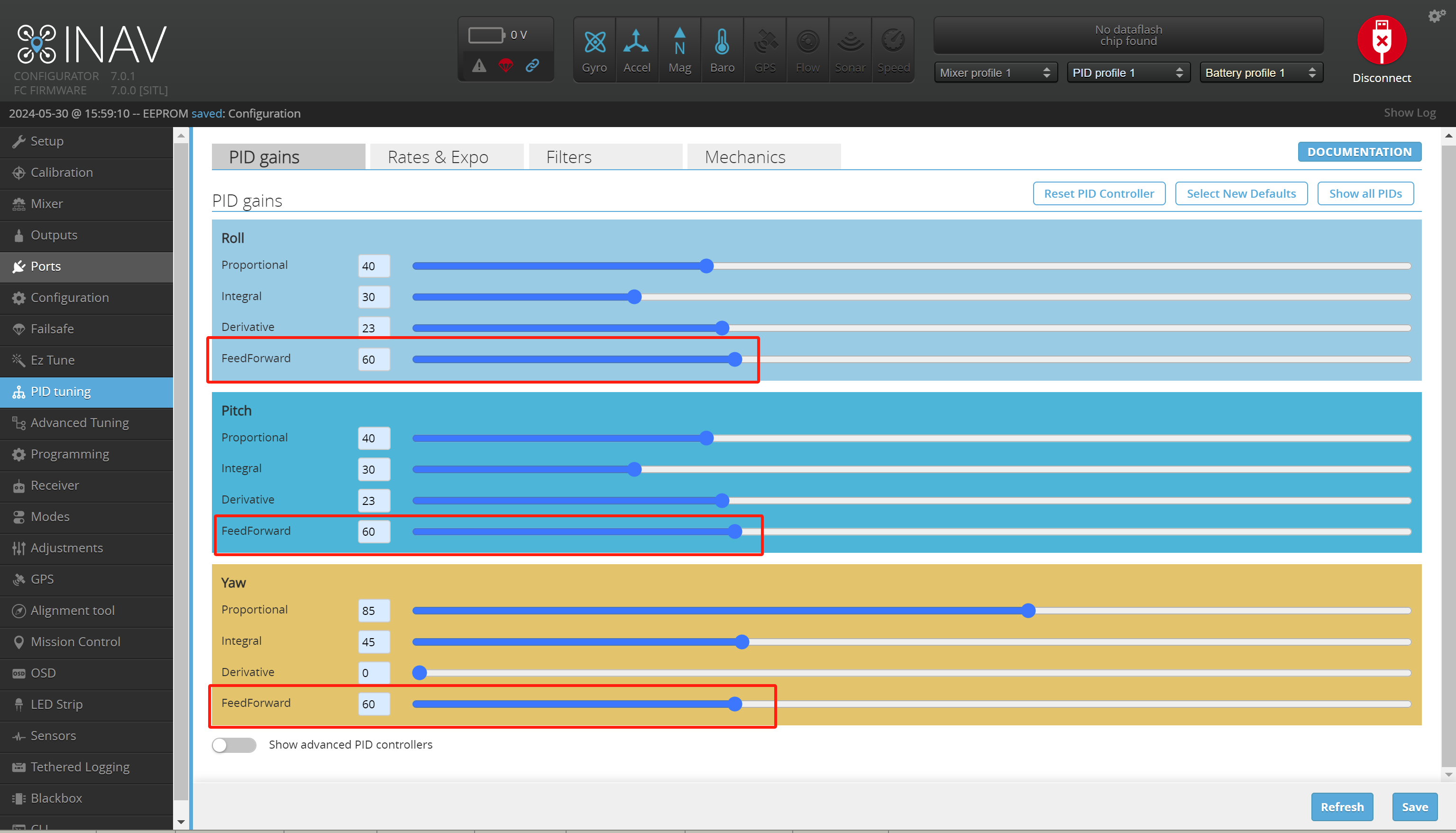
1.进入 INAV Configurator → “PID Tuning” → “FeedForward”。
2.适当增加横滚前馈值:
- 建议每次增加10左右
3.点击“保存”,试飞后调整至最佳值。
注意:前馈值过高可能导致舵机抖动,请逐步调整并试飞验证。
四、结果验证
起飞后,进入自稳模式(ANGLE),测试转弯半径是否变小。
若调整后仍未改善,可继续微调最大横滚角度或前馈值。
技术支持二维码
