关于使用INAV地面站的遥控和油门指令
一、遥控器的相关指令
启动(Arming)
当飞行器启动时,意味着飞行器准备好飞行,并且当油门应用时,电机将开始旋转。对于多旋翼飞机,电机在启动时会默认以较低速度旋转(此功能可以通过设置 MOTOR_STOP 来禁用,但出于安全考虑,不推荐禁用)。
但对于固定翼来说,需要将此功能禁用,防止油门解锁时电机旋转造成伤害
启动和停止操作通过在模式页面上设置的开关进行。
航向摇杆启动覆盖(YAW STICK ARMING OVERRIDE)
当配置了导航模式且未获得 GPS 锁定,或者当加载了航点任务但第一个航点距离设定的距离较远时,启动将被禁用。如果需要绕过此启动限制,可以通过将 nav_wp_safe_distance 设置为 ALLOW_BYPASS 并在使用启动开关时将航向摇杆移动到高位置来实现。这将绕过 INAV 4.0.0 之前的 GPS 启动限制,以及 INAV 4.0.0 之后的 GPS 和“第一个航点太远”启动限制。
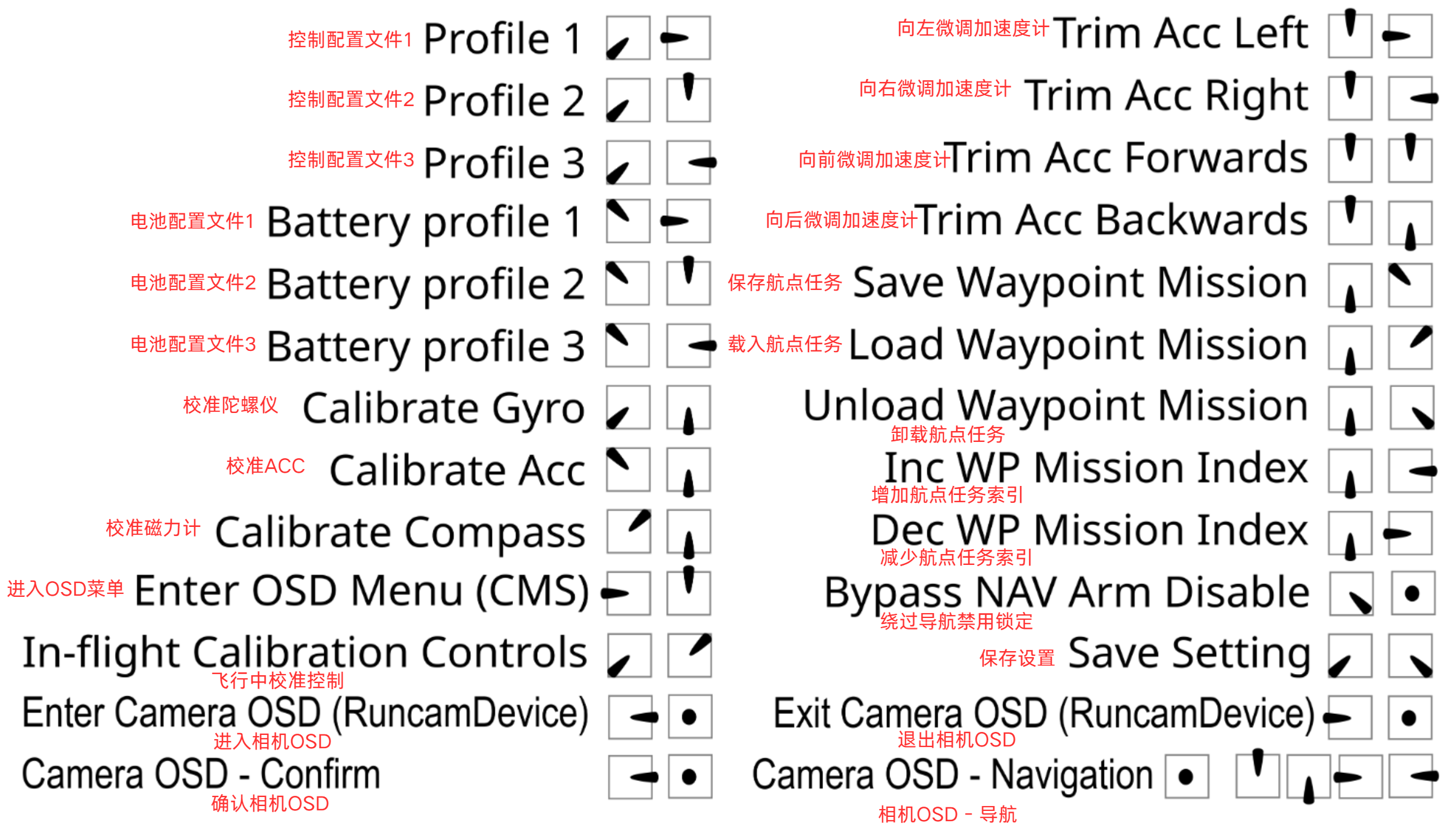
使用遥控器控制指令摇杆的示意图:
二、油门设置及其相互作用
在飞控系统中,油门设置是控制飞行器稳定性和安全性的关键。不同的油门设置相互作用,以确保飞行器能够正常启动、飞行和停止。以下是油门设置的详细说明及其相互作用:
油门的相关设置:
- throttle_idle
这个设置通常是确保所有电机能够稳定启动的最低油门值。它表示飞行器的空闲油门水平,通常设置在电机可靠启动的最低油门位置之上。在启用电机停止时,电机会以此油门值旋转。
当启动时,如果电机停止功能被禁用,电机会在此设置下持续旋转,因此必须考虑安全性,确保电机不会在不希望的情况下开始旋转。
2.min_check
这是飞行器在地面上的最低油门阈值。当油门低于此值时,飞控会采取相应动作(如电机停止或油门保持在最低值)。
在不同的启动模式下,min_check 的作用不同:
- 使用开关启动模式时,油门低于 min_check 会导致电机以 min_throttle 速度旋转。
- 如果使用默认的摇杆启动模式,油门低于 min_check 时,电机会以 min_throttle 旋转,并且禁用航向控制,以便进行启动/停止操作。
- 启用电机停止时,油门低于 min_check 会导致电机关闭,并发送 min_command 到电调。
min_check 设置必须非常精确,以确保飞行器的安全性。如果设置过低,飞行器可能无法正确停止或无法解除禁用状态。
3.min_command
该设置是在油门低于 min_check 或飞行器未启动时,发送给电调的最低命令值。它确保在飞行器未启动时,电调接收到一个有效的命令来停止电机(如果启用了电机停止功能)。 它需要设置得比电机启动所需的最小值低,以保证电机停转时的安全。
4.max_check
当油门超过 max_check 设置时,飞控会向电调发送 max_command,即最大油门命令。 它用于限制飞行器的最大油门输出,以避免电机超过预期的运行范围。
5.max_throttle
这是飞控系统发给电调的最大油门命令值。它定义了飞行器能够达到的最大油门输出,通常用于控制飞行器的最大推力。
油门设置之间的相互作用:
- 油门低于 min_check:在这种情况下,飞控会确保电机停转或以最低转速运行。如果启用了电机停止功能,则电机会停止并发送 min_command。如果没有启用电机停止,则电机会以 min_throttle 转速运行,直至油门超过 min_check。
- 油门高于 max_check: 当油门超过 max_check 时,飞控会向电调发送 max_command,确保飞行器不会在油门过高时失控。
- 油门值设置的精度:确保 min_check 和 throttle_idle 设置正确,并且与飞控的预期工作范围匹配,能够提供飞行器的稳定性。设置过低的 min_check 可能导致飞行器无法安全解除禁用状态,而设置过高的 max_check 可能会导致飞行器的推力过大,影响控制。
总的来说,油门设置需要非常小心,以确保飞行器能够在不同的操作模式下正常工作,并最大程度地提高安全性。
三、偏航控制说明
当你使用摇杆进行 解锁/上锁操作 时,偏航通道的摇杆通常会打到极限位置(比如向左打死)。为了 防止飞机在地面解锁时因偏航信号动作而产生偏航行为,默认情况下,当油门较低时(低于 min_check 设置值), 偏航输入将不会导致飞控输出偏航控制。
特殊说明:
对于三旋翼用户,你 可能希望可以在地面低油门状态下测试尾部舵机是否正常(例如检查是否正确响应偏航输入)。这时,你可以在 CLI 中设置 tri_unarmed_servo = 1(默认值),这样即使在解锁前,也可以控制尾舵伺服响应偏航通道。
- 如果你担心尾舵触地面或地面耽误动作,可以将该参数设置为 tri_unarmed_servo = 0,即在地面禁止偏航输出。
| tri_unarmed_servo 值 | 是否允许偏航控制? | 解锁前 + 油门低 | 解锁前 + 油门正常 | 解锁后 + 油门低 | 解锁后 + 油门正常 |
|---|---|---|---|---|---|
| = 0(禁用) | 否 | ❌ | ❌ | ❌ | ✅ |
| = 1(启用,默认) | 是 | ✅ | ✅ | ✅ | ✅ |
————本文引用至INAV官网: https://github.com/iNavFlight/inav/blob/master/docs/Controls.md