关于INAV地面站支持的接收机说明
一、支持的接收机类型
接收机用于接收遥控器(TX)发送的信号,并将其转换为飞控(FC)能够识别的控制指令。INAV 支持以下几类接收机:
1.1 PPM 接收机(已淘汰,仅支持 INAV 3.x 及更早版本)
- 又称 PPM SUM 或 CPPM
- 通过 单一引脚传输多达 12 个通道,但精度和抗干扰能力不如串口型接收机
- 已不建议使用,仅用于兼容早期系统
⏺ 兼容 PPM 接收机举例:
- FrSky D4R-II
- FrSky D8R-XP
- Graupner GR24
- OrangeRx R615X DSM2/DSMX 接收机
1.2 串口接收机(Serial Receiver)【推荐使用】
串口型接收机是当前主流配置方式。它通过 UART 连接,数据传输稳定、抗干扰强。
禁止连接至软件串口(SoftSerial),否则可能导致数据丢包或控制延迟。
常见协议支持:
- SBUS
- CRSF
- IBUS
- DSM/DSMX(Spektrum 协议)
- SRXL/SRXL2(新版 Spektrum 协议)
1.3 Spektrum 接收机(Legacy 支持)
INAV 早期版本支持传统 Spektrum 协议(如 DSMX),可通过串口连接。
示例设备:
- Lemon Rx DSMX 兼容接收机(含卫星模块)
RSSI 支持说明:
- INAV 1.6 起支持 “伪 RSSI” 功能,可通过卫星信号衰减次数(fade count)模拟 RSSI 值(0~1023 范围)
- 使用条件: 接收机须通过物理 RX 接口完成绑定(FC 的 bind 功能不足)
- 设置 CLI 参数: set rssi_channel = 9
1.4 S.BUS 接收机
S.BUS 是一种常见的串口协议,支持 16 个通道,广泛应用于 FrSky 和 Futaba 系列接收机。
特点:
- 支持 16 个通道(全部通过一个引脚传输)
- 通信速率高达 1Mbps(不可使用软串口 SoftSerial)
- 需要连接至支持高速串口的 硬件 UART 端口
配置要求:
- 线路连接
- 多数 S.BUS 信号是反相的,部分飞控需接入反相器
- 某些飞控(如 F4、F7)内置反相器,无需额外硬件
- 若接收机输出为非反相信号,可在 CLI 中关闭反相功能: bash复制编辑set sbus_inversion = OFF
2.禁止使用 SoftSerial
- S.BUS 的高波特率(1Mbps)超出软串口处理能力
3.通道映射 :
- 在 INAV Configurator 的 Receiver 标签页中设置对应的 AUX 映射
- 超过 8 个通道的映射为 直通(无混控重映射)
- CLI 方式设定示例:map AETR1234
兼容接收机示例:
- FrSky X4RSB
- FrSky X8R
- Futaba R2008SB
OpenTX 中配置 S.BUS 模式
若你使用 OpenTX 系统 并通过 S.BUS 与飞控通信,请确保以下设置正确,以便正常接收全部 16 个通道:
1.设置发射机协议, 在 Model Setup 菜单中,设置为:
- 协议模式:D16
- 通道范围:CH1–16(非 CH1–8)
2.绑定前确认以上设置,否则将无法在 S.BUS 中使用 16 通道。
注意:OpenTX 2.0.9 存在通道限制 Bug
- 某些出厂版本的 Taranis X9D Plus 搭载了旧版固件 OpenTX 2.0.9。
- 该版本存在一个严重 Bug(issue #1701): 即便选择了 CH1–16/D16,也只能使用前 8 个通道。
- 解决方法: 升级至最新版本的 OpenTX 固件, 建议使用 OpenTX Companion 升级到至少 2.2.x 或 EdgeTX 替代方案。
二、协议简介
2.1F.Port 简介
F.Port 是 FrSky 推出的串行通信协议,在 单根信号线上 同时传输,只需将 S.Port(或标记为 F.Port)引脚 连接至飞控上的 任意一个空闲 UART 的 TX 引脚(如 TX1、TX2 等)。
- 16 个通道的控制信号
- 完整的反向遥测数据
它结合了 S.Bus + SmartPort 的优点,简化布线并提升效率。
支持的接收机型号:
- FrSky R-XSR
- X4R / X4R-SB
- XSR / XSR-M
- R9 Mini / R9 Slim / R9 Slim+
注意:
- ACCST 系列需刷支持 F.Port 的固件。
- ACCESS 系列可在发射机中设置 F.Port 或 S.Bus 输出(在 RX 设置页切换)。
配置方式:
◾ INAV 2.6 及以上版本:
- 默认即可正常工作,但如有升级需确认以下参数: set serialrx_inverted = OFF、set serialrx_halfduplex = AUTO
◾ INAV 2.6 以下旧版本:
- 需手动启用半双工 + 反转设置: set serialrx_inverted = ON、set serialrx_halfduplex = ON
其他设置:
- Ports 页面中,对应 UART 勾选: Serial RX
- Receiver 页中选择协议为: CRSF(F.Port 与 CRSF 共用协议层)
2.2 SUMD 协议
SUMD(Serial Uni-Directional Digital)协议 是 Graupner HoTT 系统所使用的一种串行数字信号协议,用于将遥控器的控制通道通过串口发送给飞控。
SUMD 协议支持情况(在 INAV 中):
- ✅ 最多支持 16 个通道
- ✅ 以串口方式输入
- ❌ 不支持通过 SoftSerial(软串口)
- ✅ 适用于 Graupner HoTT 系列接收机
兼容的接收机型号:
GR-24:HoTT 协议,支持 SUMD
GR-12SH+:小型高性能接收机,支持 SUMD 和 Telemetry
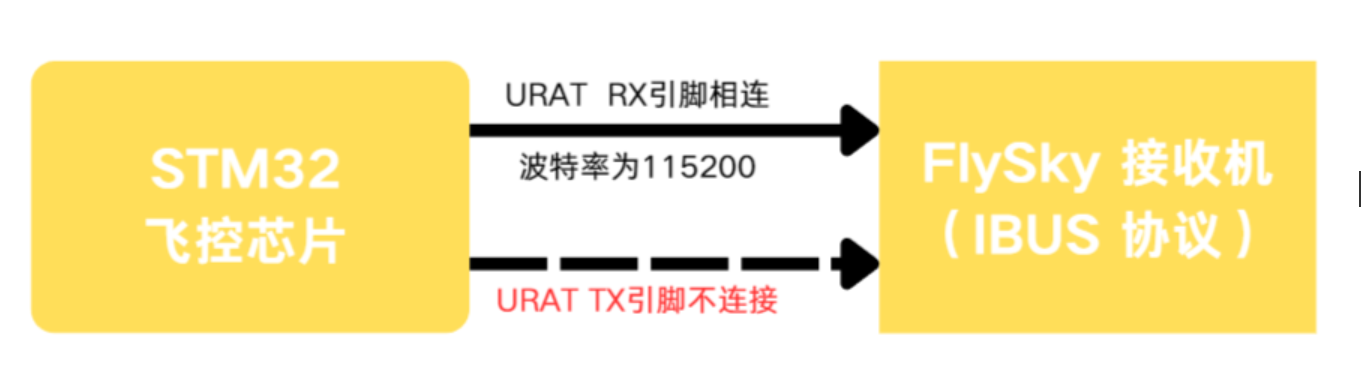
2.3 IBUS 协议
IBUS 是 FlySky 自家开发的数字串行协议,广泛用于其中低端遥控系统。它具有响应速度快、抗干扰强、接线简单的特点,适用于 INAV 等飞控固件。
支持情况(INAV):
- 最多通道:支持 10 个通道
- 接口类型:使用 UART 串口,波特率为 115200
- 刷新率:高达 120Hz(PPM 为 50Hz)
常见兼容接收机:
- FS-IA6B
- FS-X6B
- FS-IA10
- TGY-IA6B / IA10
连接方式:
2.4 SRXL2 协议
SRXL2 是 Spektrum 推出的新一代串行通信协议,支持飞控与接收机之间的双向通信。相比早期 Spektrum 协议,SRXL2 具备更好的性能与更多功能,例如:
- 支持读取飞控遥测数据
- 可通过 Spek
接线说明
- 将接收机上标注为 "S" 的信号脚连接到飞控 UART 的 TX 引脚
- 电压要求:3.3V(SPM4651T 需 4.0V)~ 8.4V
- 注意:部分 F4 飞控的 TX 引脚带有信号反相器(如 S.Port 用于遥测),请务必确认所用引脚 无反相器
配置方法(CLI 命令)
打开 CLI,依次输入以下指令:
feature TELEMETRY
feature -RSSI_ADC
map TAER
set receiver_type = SERIAL
set serialrx_provider = SRXL2
set serialrx_inverted = OFF
set srxl2_unit_id = 1
set srxl2_baud_fast = ON
set rssi_source = PROTOCOL
set rssi_channel = 0
save说明:
- RSSI_ADC 要关闭,否则会覆盖协议内提供的 RSSI 值
- rssi_channel 必须设为 0,不同于早期 SPM4649T 等接收机使用通道 9
- srxl2_baud_fast = ON 可启用更高通信速率
绑定命令(Bind)
INAV 2.6 及以上可直接通过命令进入绑定模式,无需重启飞控: bind_rx
(旧版本需使用 spektrum_sat_bind 并重启飞控)
2.5 MultiWii 串行协议(MSP RX)
MSP RX 允许使用串口(如电脑、上位机或树莓派等)发送 MSP 指令作为遥控信号输入, 最多支持 18 个通道。
使用注意事项
- 更新频率要求: 必须使用 MSP_SET_RAW_RC 命令以 ≥ 5Hz 的频率 更新遥控信号,否则飞控可能触发 failsafe。
- 通道映射: MSP_SET_RAW_RC 遵循你设置的 RC 通道顺序(如 AETR、TAER 等)。 但 MSP_RC 总是返回默认的 AERT 顺序,与实际通道顺序无关。
- 可与实际遥控器并用: 若在编译固件时启用了 USE_MSP_RC_OVERRIDE,则可通过 CLI 指令 msp_override_channels 指定哪些通道由 MSP 控制,其余通道依旧来自物理遥控器。
三、模拟遥控器(SIM Joystick)使用说明
INAV 支持在 SITL 模拟仿真环境 中使用 Joystick(操纵杆/游戏手柄) 进行控制。适用于飞行模拟器调试或算法仿真。
配置方法:
你可以通过 INAV Configurator 或 CLI 命令设置:
# 查看接收机类型
get receiver_type
# 设置为模拟输入(Joystick)
set receiver_type = SIM可选值为:
- NONE:无接收机
- SERIAL:串口接收机
- MSP:MSP 协议接收机
- SIM:SITL 模拟输入
四、接收机信号丢失检测机制
INAV 默认启用接收机信号丢失检测,用于:飞行安全控制、启动 failsafe 动作(如自动返航、降落等)
判定信号丢失的条件:
- 完全无信号(如接收机断电、通信故障)
- 串口接收机进入 failsafe 状态
- 前 4 个通道(Aileron/Elevator/Throttle/Rudder) 中任一值超出设定的有效范围
参数配置:
| 参数名 | 含义 |
|---|---|
| rx_min_usec | 通道有效最小值(例如 PWM 脉宽最小值,默认为 885) |
| rx_max_usec | 通道有效最大值(例如 PWM 脉宽最大值,默认为 2115) |
| mid_rc | 中值(在失控状态时 pitch/roll/yaw 回到该值) |
| rx_min_usec | 同时用于设置 throttle failsafe 的默认值(非 3D 模式) |
五、串口接收机设置步骤
- 打开 Configurator → Ports 页签,勾选你接收机连接的 UART 的 Serial RX 选项,保存并重启。
- 前往 Configuration 页签: 设置接收机类型为 Serial-based Receiver 选择具体协议(如 SBUS、CRSF、FPort 等) 保存并重启
- 或使用 CLI 命令设置:
set receiver_type = SERIAL
set serialrx_provider = SBUS支持的协议类型有(部分):SBUS、IBUS、FPORT、CRSF、SRXL2、GHST、MAVLINK 等
六、接收机配置说明
FrSky D4R-II 接收机
建议将 failsafe 模式设置为 No Pulses(无脉冲)。
操作步骤:
- 关闭 TX(遥控器)和 RX(接收机)
- 打开 RX
- 按一下接收机上的 F/S 按钮(不要长按)
- 再关闭 RX
设置完成后,当接收机失去信号时,会输出“无脉冲”,飞控会迅速识别并进入 failsafe。
Graupner GR-24(PWM 接收机)
- 建议在接收机设置菜单中,将油门通道设为 FAILSAFE 模式,并设置一个低于 rx_min_usec 的值(如 800)。
- 所有控制通道应设置为 HOLD 或 OFF,但 不要混用 FAILSAFE 与 OFF,否则飞控无法正确识别 failsafe 状态。
接收机通道范围设置
有些接收机输出的通道脉宽范围非标准,会导致飞控识别不准确。INAV 允许你手动映射这些范围。
① 重置已有设置(如果之前配置过):
rxrange reset
save② 获取真实通道范围:
- 打开 Configurator → Receiver 页面。
- 一次只移动一个摇杆,查看通道最小值与最大值(建议关闭螺旋桨)。
- 记录前 4 个通道(通常是油门、横滚、俯仰、偏航)的最小值与最大值。
③ 配置通道范围:
rxrange <通道编号> <最小值> <最大值>
④ 设置中值:
在遥控器中使用 Subtrim(微调)功能 将中位调整至 1500μs 左右,确保控制精度。
⑤ 通道反向设置(如有需要):
如果需要反转通道方向,只需反过来写最大值和最小值:rxrange 0 2000 1000
————本文引用至INAV官网: https://github.com/iNavFlight/inav/blob/master/docs/Rx.md