关于INAV地面站的垂直起降(VTOL)功能
一、介绍
当前的 INAV VTOL 固件 已具备可飞行性,但尚未经过广泛测试, 可能仍存在未发现的问题。
本教程适用于以下用户:
- 有 INAV 多旋翼 与 INAV 固定翼 配置与飞行经验;
- 理解并能自行编写 Mixer 自定义混控 配置;
- 理解 VTOL 飞行的 基本物理原理。
VTOL 配置步骤说明
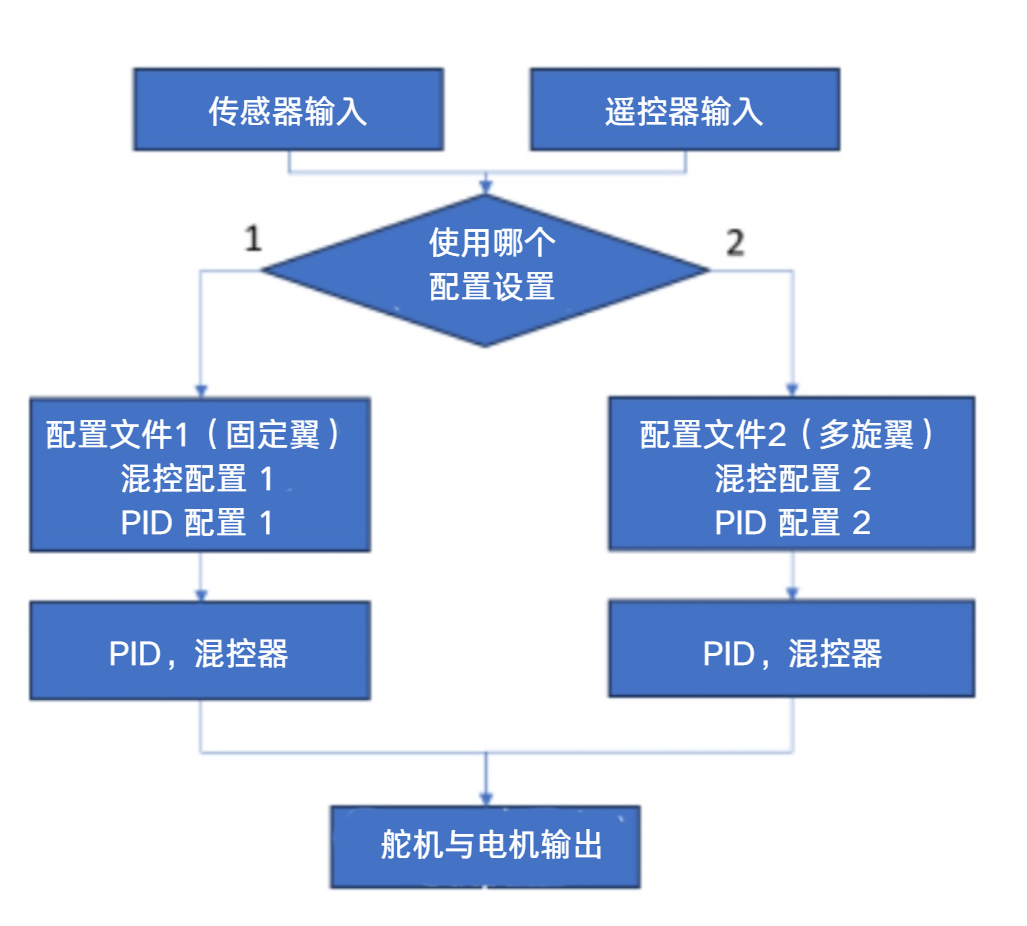
INAV 的 VTOL 功能基于飞控中 两个独立的配置文件切换(Mixer Profile + PID Profile) 实现:
| 模式 | Profile 配置 | 功能说明 |
|---|---|---|
| 固定翼(FW)模式 | Profile 1 | 普通固定翼配置(包括 PID、Mixer) |
| 多旋翼(MC)模式 | Profile 2 | 普通多旋翼配置(包括 PID、Mixer) |
🔁 除 PID 与 Mixer 外的其它参数,在两个模式间是共用的。
设置步骤
✅ 第一步:Profile 1 设置
将 Profile 1 设置为正常的固定翼或多旋翼模式(根据你的机型起飞方式决定先用哪种)。
✅ 第二步:Profile 2 设置
将 Profile 2 设置为另一种形态(例如:如果 Profile 1 是固定翼,这里配置为多旋翼)。
✅ 第三步:模式切换设置(Modes Tab)
在 Configurator 中的 “Modes” 页设置 Profile 切换的开关逻辑,实现手动或自动切换。
✅ 第四步(推荐):过渡混控配置
建议在 多旋翼 Profile 中配置 Transition Mixing(过渡混控),以便起飞后获得一定空速(推进力)进行平滑切换。
✅ 第五步(可选):自动化切换(如返航)
可以在 “RTH” 模式下配置自动切换 Profile,以应对 Failsafe(失控)等自动返航场景。
二、配置流程
2.1 STEP0:加载参数预设 / 模板
- 优先查找适用于你机型的 DIFF 文件(推荐使用他人已验证过的 VTOL 配置)。
- 如果找不到 DIFF 文件,可以在 Configurator 的“固件刷写”界面中选择“保留当前设置(Keep current settings)”,然后手动将以下 CLI 参数输入进飞控中(参考官方建议参数)。
set small_angle = 180
set gyro_main_lpf_hz = 80
set dynamic_gyro_notch_min_hz = 50
set dynamic_gyro_notch_mode = 3D
set motor_pwm_protocol = DSHOT300 #Try dshot first and see if it works
set airmode_type = STICK_CENTER_ONCE
set nav_disarm_on_landing = OFF #band-aid for false landing detection in NAV landing of multi-copter
set nav_rth_allow_landing = FS_ONLY
set nav_wp_max_safe_distance = 500
set nav_fw_control_smoothness = 2
set nav_fw_launch_max_altitude = 5000
set servo_pwm_rate = 160 #If model using servo for stabilization in MC mode and servo can tolerate it
set servo_lpf_hz = 30 #If model using servo for stabilization in MC mode
## profile 1 as airplane and profile 2 as multi rotor
mixer_profile 1
set platform_type = AIRPLANE
set model_preview_type = 26
set motorstop_on_low = ON
set mixer_pid_profile_linking = ON
mixer_profile 2
set platform_type = TRICOPTER
set model_preview_type = 1
set mixer_pid_profile_linking = ON
profile 1 #pid profile
set dterm_lpf_hz = 10
set d_boost_min = 1.000
set d_boost_max = 1.000
set fw_level_pitch_trim = 5.000
set roll_rate = 18
set pitch_rate = 9
set yaw_rate = 3
set fw_turn_assist_pitch_gain = 0.4
set max_angle_inclination_rll = 450
set fw_ff_pitch = 80
set fw_ff_roll = 50
set fw_p_pitch = 15
set fw_p_roll = 15
profile 2
set dterm_lpf_hz = 60
set dterm_lpf_type = PT3
set d_boost_min = 0.800
set d_boost_max = 1.200
set d_boost_gyro_delta_lpf_hz = 60
set antigravity_gain = 2.000
set antigravity_accelerator = 5.000
set smith_predictor_delay = 1.500
set tpa_rate = 20
set tpa_breakpoint = 1200
set tpa_on_yaw = ON #If model using control surface/tilt mechanism for stabilization in MC mode
set roll_rate = 18
set pitch_rate = 18
set yaw_rate = 9
set mc_iterm_relax = RPY
save2.2 STEP1:在配置文件 1 中配置为普通固定翼
选择第一个 Mixer Profile 和 PID Profile:
在 CLI 中切换到你希望先配置的 mixer_profile 和 pid_profile。
如果你已经加载了上述预设,也可以通过图形界面(GUI)进行切换。
mixer_profile 1 # 在本例中,我们先配置 profile 1
set mixer_pid_profile_linking = ON # 让 mixer_profile 控制对应的 pid_profile 切换
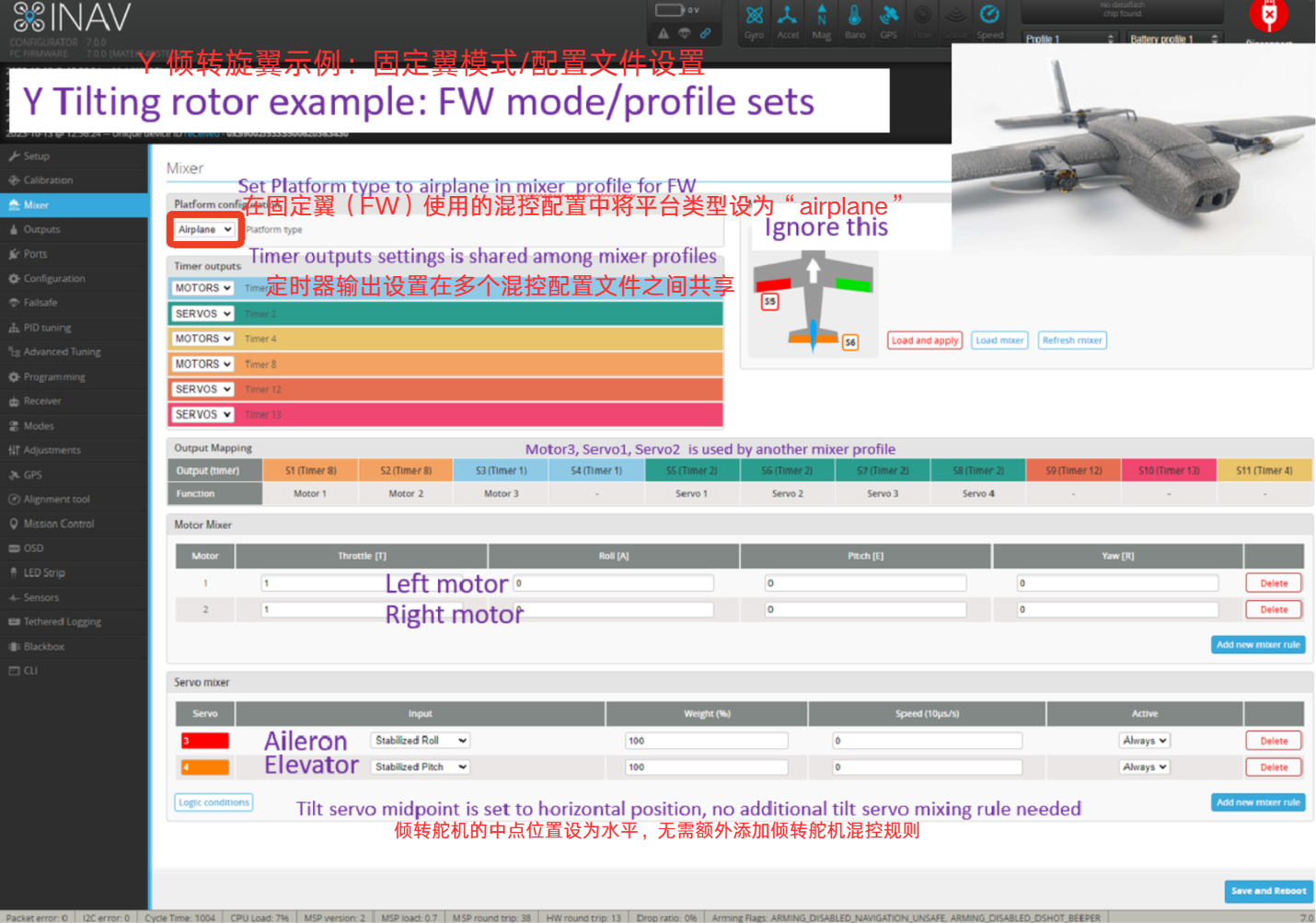
set platform_type = AIRPLANE
save配置固定翼/多旋翼参数:
正常配置你的固定翼或多旋翼,或者你可以默认设置
- DShot 电调协议的可用性取决于你使用的输出数量和飞控型号。你可以修改电机接线,或者使用 Oneshot/Multishot 协议,并校准油门范围。
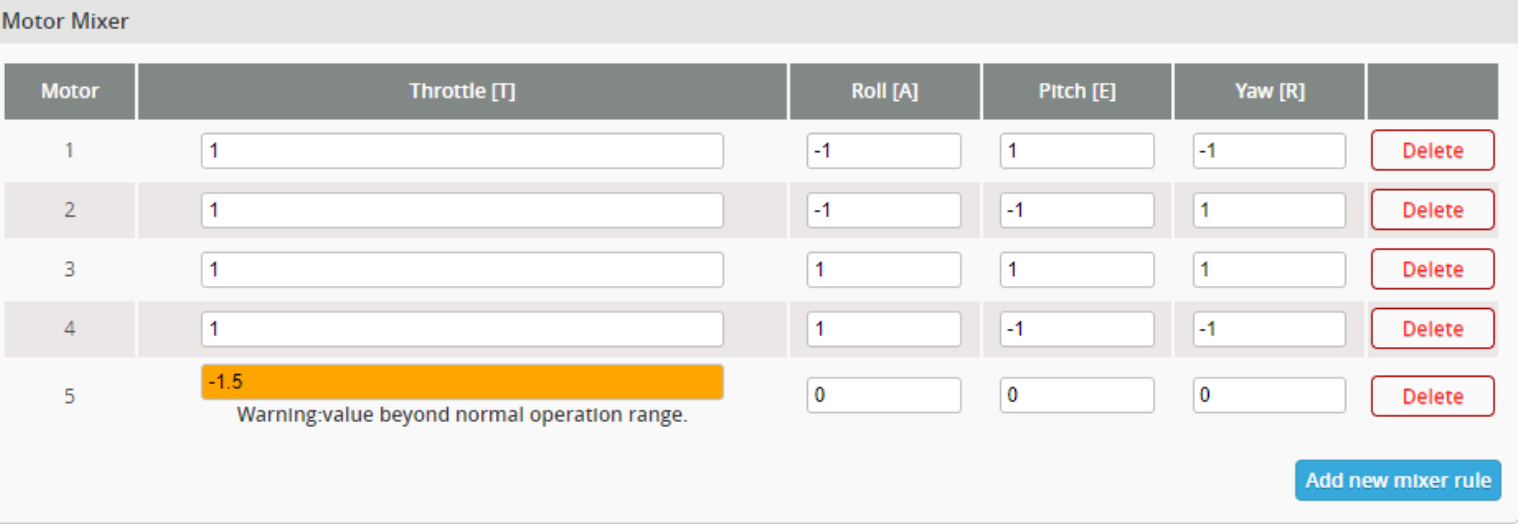
- 如果希望某个电机在该模式中停止运行,可以将该电机设置为 throttle = -1。
- 建议进行一次试飞,以确保所有功能正常工作,并根据情况进行参数调试和舵机微调。
2.3 STEP2:在配置文件2中配置为多旋翼
切换到另一个 Mixer 配置文件和 PID 配置文件:
在 CLI 中,切换到另一个 mixer_profile 及其对应的 pid_profile。
如果你之前已加载预设模板,也可以在图形界面中切换 mixer_profile/pid_profile。
mixer_profile 2
set mixer_pid_profile_linking = ON
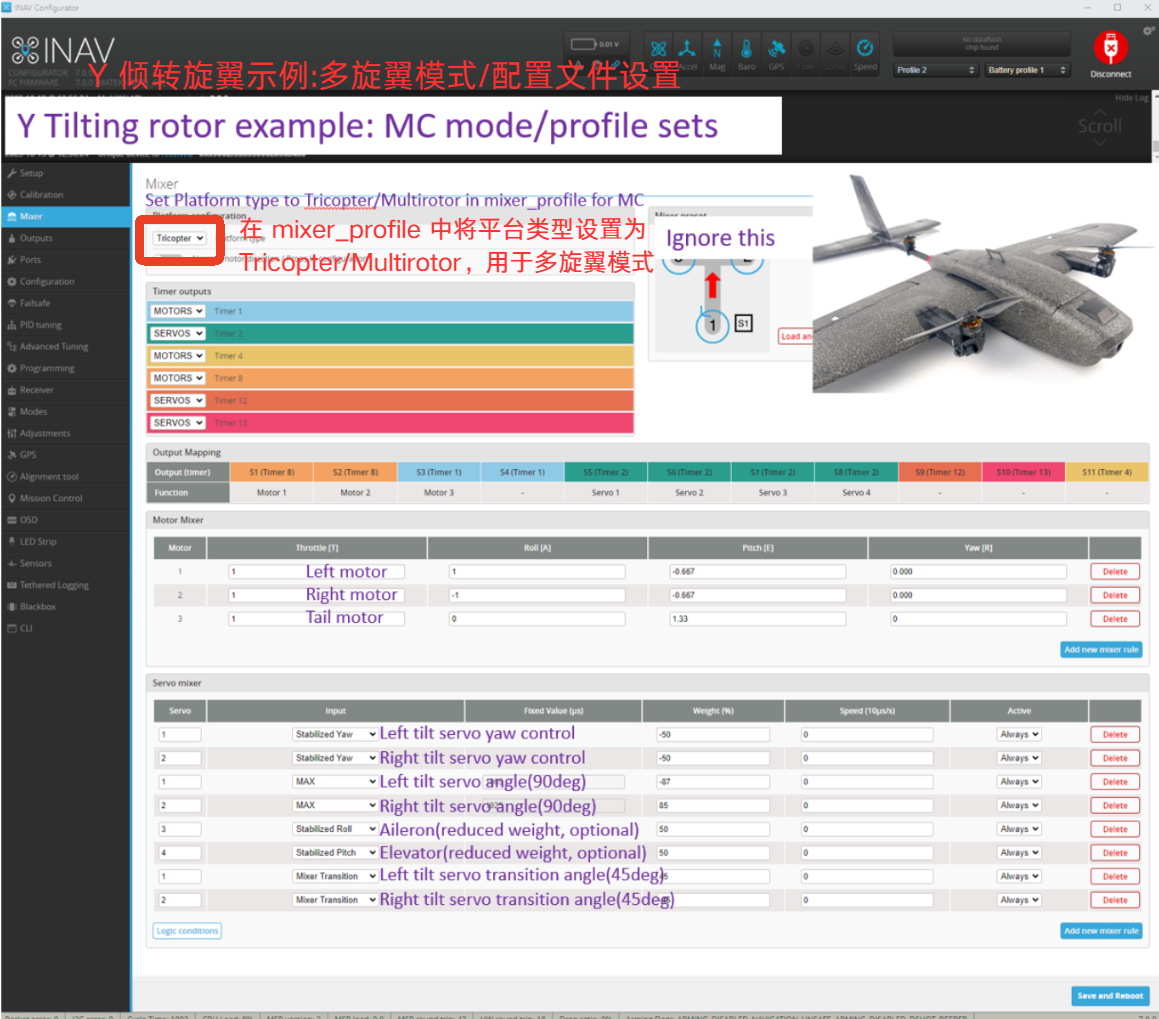
set platform_type = MULTIROTOR/TRICOPTER
save配置多旋翼 / 三旋翼:
- 将你的飞行器按常规方式设置为多旋翼或三旋翼模式,此次配置适用于 mixer_profile 2 和 pid_profile 2。
- 在舵机混控中使用 MAX 作为输入信号,用于控制电机倾转,而不会影响舵机的中点位置。
- 这一阶段主要聚焦在“配置文件特定”的设置,可以通过复制粘贴默认 PID 设置来简化流程。
- 可以在 motor mixer 中将油门设置为 -1 作为占位符:该电机不会输出,但后续的电机规则仍会生效。
- 多旋翼模式下开启导航模式需启用罗盘(compass)。
- 建议进行一次测试飞行,确保系统运行正常,并对参数进行微调。
尾撑机(Tailsitters):计划在 INAV 7.1 中支持
- 固定翼模式 / 配置文件设置 按照常规方式配置固定翼的飞行模式和配置文件。
- 多旋翼模式 / 配置文件设置 尾撑机垂直飞行使用 MultiCopter 类型作为飞控平台类型(platform_type = MULTIROTOR)。
- 飞控方向基准 系统默认以固定翼方向为基准(即 ROLL 轴为推力方向)。 所以,在尾撑飞行(多旋翼模式)下需设置:set tailsitter_orientation_offset = ON
- 混控设置 在尾撑多旋翼模式下,根据尾撑安装方向配置 ROLL / YAW 混控。在此模式中,YAW 轴为推力方向。
- 地面测试 进行地面测试,观察机体方向是否在 INAV Configurator 的 Setup 页签中随之正确变化。
2.4 STEP3:模式设置
我们建议在遥控器上使用 三段拨杆 来控制这些模式,以便飞手可以在任何时候切换进出 VTOL 模式。
以下是在 INAV Configurator 的 Modes 页面底部的一个示例配置:

| 通道值范围 | 模式说明 |
|---|---|
| 1000~1300 | 启用 Profile1(固定翼模式),关闭过渡 |
| 1300~1700 | 启用 Profile2(多旋翼模式),打开过渡(用于加速) |
| 1700~2000 | 启用 Profile2(多旋翼模式),关闭过渡 |
- 配置文件切换功能将在启动后完成运行时传感器校准(约 15~30 秒)后可用。当启用导航模式或位置保持模式时,将无法进行配置文件切换。
- 默认情况下,系统使用 mixer_profile 1。当启用 MIXER PROFILE 2 模式 时,系统将切换至 mixer_profile 2。
- 配置成功后,在 INAV Configurator 中刷新相关页面时,你将看到配置文件和模型预览相应变化。
- 使用 MIXER TRANSITION 模式,可在多旋翼模式下获得空速。请根据需要正确设置此模式。
2.5 STEP4:倾转舵机设置
设置倾转舵机的正确运行对于实现良好的偏航控制至关重要。虽然使用默认设置也能工作,但通常会导致你的飞行器在每次偏航操作时向前“爬行”。
下面的步骤将指导你如何 微调倾转舵机 以实现理想的控制效果:
1. 将倾转舵机设置为 45 度角:
- 将倾转舵机连接并供电至飞控。
- 将模式开关拨至中间位置,进入 Transition Mode(过渡模式)。
- 在 Outputs 页面中查看对应舵机通道的输出是否为 1500μs。
- 在此状态下,舵机应位于 45 度位置,你可以将电机与螺旋桨安装到倾转支架上,使其相对于水平线朝上倾斜 45 度。
备注 1: 如果你使用的是专用倾转舵机组件,可能舵机或安装架上会有刻度标记,帮助你对准 45 度角。若由于舵机齿轮与控制臂/安装板的啮合关系导致角度略有偏差,没关系,后续步骤会自动进行补偿。
备注 2: 如果你是通过连杆调整倾转角度,建议把控制臂尽量调至舵机中位位置。一般来说,当安装板倾斜 45 度时,舵机臂应大致垂直于机身。
2. 切换到多旋翼 / 三旋翼模式:
- 假设你已按步骤 1 和 2 设置好混控配置,现在可以切换至 MultiCopter / TriCopter 模式。
- 此时电机应向上倾转,若没有,前往 Outputs 页面反转对应舵机。
- 虽然不要求精确 90 度向上,但应尽量接近垂直。
- 同时在 Mixer 页确认 MAX 的值为 100 / -100,确保舵机能打满行程。
3. 调整多旋翼模式下的最大行程:
- 在多旋翼模式下,进入 Outputs 页面,调整舵机通道的 MIN 和 MAX 值,使得电机在舵机打满时略向后倾。
- 将螺旋桨对准尾部或机翼,检查两边倾斜角度是否对称。
备注: 可使用卡尺或量块检测间距;或者将舵机调整到刚好螺旋桨接触到机翼,然后分别对两边 同时调整相同幅度的 MIN 和 MAX 值,确保两边角度一致。
4. 调整固定翼模式下的最小位置:
- 切换至固定翼模式,重复上一步。
- 确保舵机在此模式下将电机完全朝前水平指向。
- 同样在 Outputs 中调整 MIN 和 MAX 值。
备注: 正确对齐非常重要,否则飞行时会产生偏滚。若使用的是专用倾转舵机,可通过测量舵机前边缘与电机安装板前边缘的距离来确保一致性。
5. 调整倾转舵机垂直角度:
- 切换回多旋翼模式,打开 Mixer 页面。
- 在 STEP2 中的混控设置中,将 MAX 值由 100/-100 逐步缩小至如 80/-80,直到电机能完全垂直向上。
每次调整后记得 Save & Reboot,更改才会生效。
- 用遥控器拨动偏航摇杆至最左和最右,检查: 偏航左:左电机向后倾,右电机向前倾; 偏航右:相反方向。
5. 调整倾转舵机垂直角度:
- 切换回多旋翼模式,打开 Mixer 页面。
- 在 STEP2 中的混控设置中,将 MAX 值由 100/-100 逐步缩小至如 80/-80,直到电机能完全垂直向上。
每次调整后记得 Save & Reboot,更改才会生效。
- 用遥控器拨动偏航摇杆至最左和最右,检查: 偏航左:左电机向后倾,右电机向前倾; 偏航右:相反方向。
6. 调整倾转舵机偏航控制幅度:
- 回到 Mixer 页面,在多旋翼模式下,调节 “Stabilized Yaw” 对应舵机的值(原设为 ±50)。
- 可尝试从 ±30 开始逐渐增加,直到两侧舵机动作幅度一致且对称。
最大值应以:两侧舵机对称运动且无一侧提前停止为准。
7. 检查操作与方向是否正确:
多次切换 “固定翼→过渡→多旋翼” 模式,观察舵机是否记住设定状态。
- 固定翼模式:舵机前倾、水平。
- 多旋翼模式:舵机垂直、电机朝上,偏航时电机对称动作。
可选操作:简化负值设置
- 如果你不喜欢在 Mixer 中使用负值,可以通过反转舵机方向(Outputs 页),然后将原来的负值设置为正值。
- 反转后请再次检查 MIN / MAX 设置,并确认: 偏航控制动作正确; 固定翼时电机水平指向; 多旋翼时电机垂直指向。
2.6 STEP5:过渡混控设置
Transition Mixing(过渡混控) 主要用于多旋翼模式下,在切换至固定翼模式之前 获取足够的空速。当你激活 MIXER TRANSITION 模式时,相关的电机或舵机会按照你配置的方式进行动作。
重要提醒:
- 一旦激活了导航模式(如定点、返航等),Transition Mixing 的输入将被禁用。
- 如果你希望在 VTOL 模式下实现返航(RTH) 且不失速,启用 Transition Mixing 是必要的前提条件。
舵机过渡混控(适用于倾转旋翼 VTOL):
- 适用情况: 当你使用倾转旋翼架构时,需要让电机在固定翼和多旋翼模式之间平滑过渡角度。
- 操作步骤:
- 打开 Mixer(混控)页面。
- 点击 “Add new mixer rule” 添加新的舵机混控规则。
- 在 Input 下拉框中选择 “Mixer Transition”。
- 设置合适的 Weight(比例)/ 固定值,用于控制过渡时的电机倾斜角度(比如 45° 倾角,对应 45 值)。

电机“过渡混控”:用于专用前向电机配置
在电机混控中设置:
- 若 throttle 的值在 -2.0 到 -1.0 之间:则在启用“混控过渡模式”(MIXER TRANSITION)时,该电机将 无视遥控器油门位置而旋转,速度为 abs(throttle) - 1 所对应的油门范围。
- 空中模式类型(Airmode type)必须设置为 "STICK_CENTER"。 禁止使用 "THROTTLE_THRESHOLD" 模式,否则在油门未达到阈值前,该“负值”电机将不会开始旋转。
尾座式机型(TailSitter)“过渡混控”说明:
无需额外设置。在**角度模式(Angle Mode)**下,固件会自动将目标俯仰角(target pitch angle)加上 45 度偏移量,实现过渡混控功能。
借助以上设置,尾座机可以在进入固定翼飞行模式时避免失速,从而实现顺畅、安全的模式切换。
三、自动模式切换(自动返航)(可选项)
这是 测试最少的功能之一,主要用于 在失控返航(RTH)时的自动飞行模式切换。
在正确配置后,模型会先以固定翼(FW)模式高效返航,然后切换至多旋翼(MC)模式,以实现更稳定、更安全的降落。
3.1 启用自动切换功能:
在 多旋翼模式的 mixer_profile(如 mixer_profile 2)中,输入以下 CLI 命令:
mixer_profile 2
set mixer_automated_switch = ON3.2 设置过渡延时(多旋翼 → 固定翼)
用于指定模型在从 MC 切换至 FW 前,需要多少时间来获得足够空速(单位为 100ms)
mixer_profile 2
set mixer_switch_trans_timer = 30 # 等于 3 秒3.3 在固定翼模式配置自动切换(FW → MC)
若你希望在返航末尾自动降落为 MC 模式,需在 FW profile 中也启用:
mixer_profile 1
set mixer_automated_switch = ON3.4 保存设置:
save⚠️ 若所有配置文件中的 mixer_automated_switch 均为 OFF(默认值),则模型将不会进行自动过渡。此时,你仍可在手动切换模式后再启用导航功能。
四、实测建议与经验分享
通用建议:
- VTOL 模型在 MC 模式下,在大风中飞行风险较高,请谨慎测试。
- 在尝试中空切换前,请确保你具备从失速中恢复的能力。
- 阅读并理解每一条 diff all 配置,在首飞前能避免多数问题。
倾转旋翼机建议:
某些倾转旋翼机在启用 MIXER TRANSITION 时,可能出现“偏航/横滚联动振荡”问题,
- 解决方案:1. 使用“桨叶相对相遇于顶部/后部”的安装方式,平衡力矩和 P 因素影响;2. 在倾转电机上加入少量偏航混控(约 0.2)。
在 FW 模式切换初期,倾转电机正在提供升力,但后电机尚未介入,可能引发“俯仰陡然上升”。
- 建议: 1.加快倾转舵机速度以缩短过渡时间; 2.降低固定翼切入时的油门来缓解冲击。
专用前向电机建议:
- 这种 VTOL 架构最容易设置;
- 可以分别为悬停和前飞使用不同电机/螺旋桨组合,提升效率。
————本文引用至INAV官网: https://github.com/iNavFlight/inav/blob/master/docs/VTOL.md