如何使用SpeedyBee APP中的飞行状态检测功能
一、原理
使用SpeedyBee APP中的 飞行检测功能 可以方便快捷设置航点, 支持无线快速上传航线任务,省去连接电脑的繁琐步骤。
航点飞行(WaypointMission)是一种自动飞行模式,飞控系统根据预设航点自动导航飞行器,并按照设定的飞行路径执行任务。该模式适用于测绘、巡检、航拍等场景。
二、设备准备
硬件设备
1.飞控: SpeedyBee F405 WING APP/SpeedyBee F405 WING MINI/SpeedyBee F405 WING APP V2任意一款飞控均适用该教程。
注意:飞控要使用ArduPilot固件
2.GPS模块: 用于提供精准定位,如BZ-251。
3.遥控器:用于手动控制航点模式切换。
4.手机:下载最新版本的SpeedyBee APP
三、具体操作
3.1 飞控连接
- 使用 USB线 为飞控供电。
- 确保无线板LED状态为绿灯闪烁 (此时为BLE模式)。

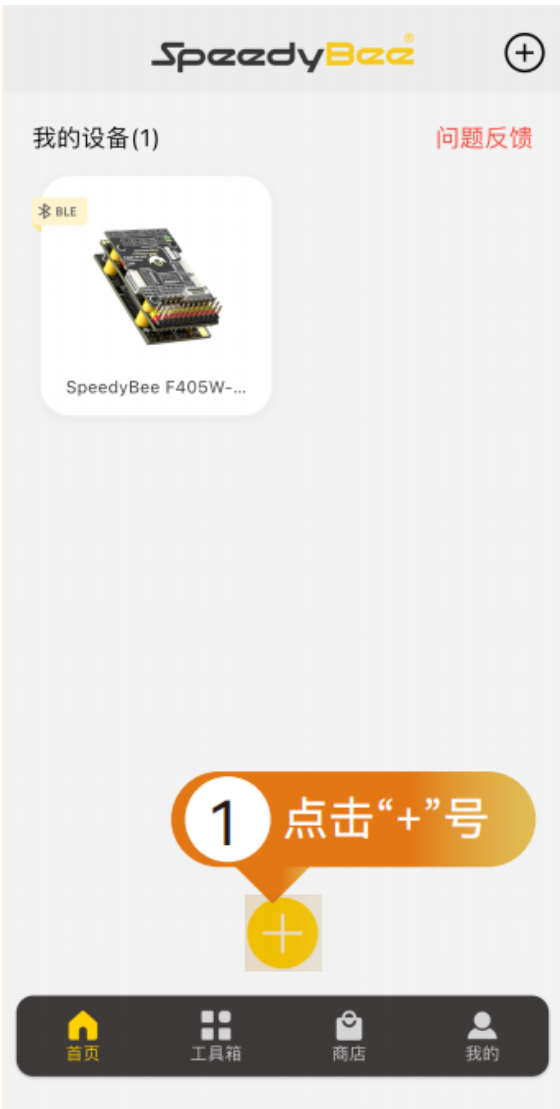
- 打开 APP,点击下方的“+”号。
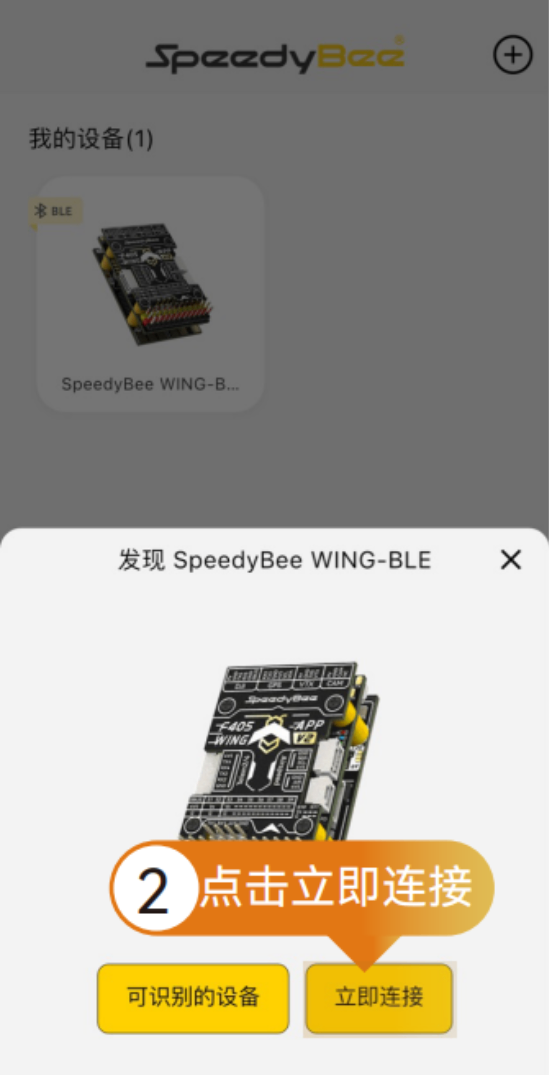
- 选择“立即连接” ,自动搜索附近设备,请确保设备是你正在使用的飞控。
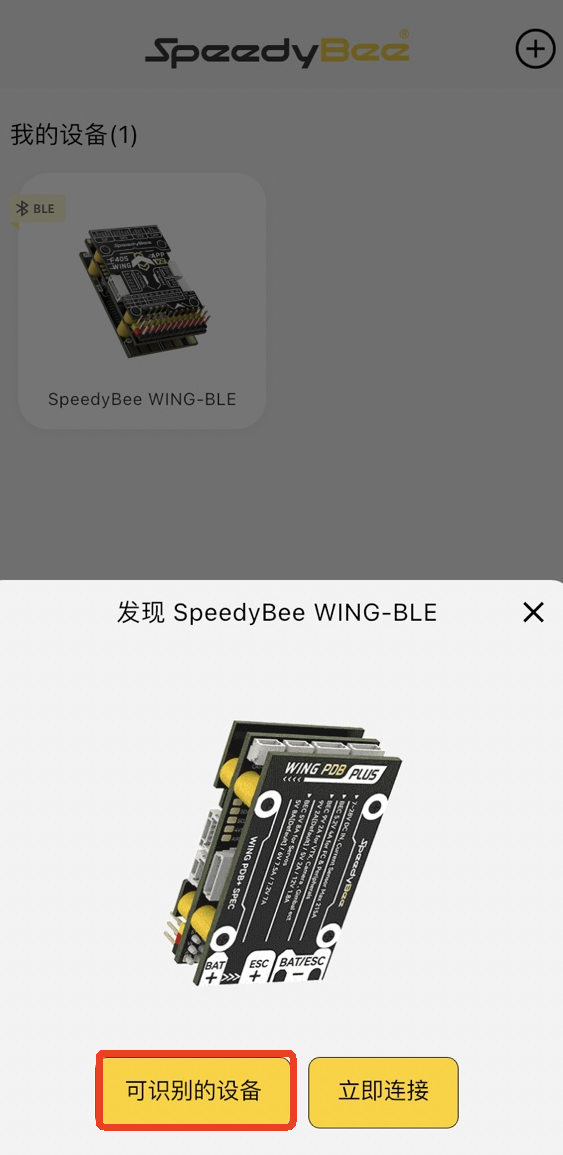
- 如果不是你正在使用的,请点击 “可识别设备”,选择对应的飞控。
- 连接成功后,进入卡片界面。

3.2 修改航点高度和航点半径
- 点击进入飞控调参。

- 进入全部参数表
- 设置返航高度,默认为100m;设置航点半径,默认为90m。
- 点击保存设置

3.3 飞控状态检测功能介绍
- 点击 飞行状态检测,进入功能页面

- 进入飞行状态检测功能

- 模式:显示当前飞控使用的模式
- GPS: 显示GPS当前状态
- RSSI值:显示接收机接收到的遥控器信号强度
- 电压:显示飞控当前供电的电压
- 高度:显示飞机的当前的高度
- 地速:飞机相对于地面的真实移动速度
- 爬升率:飞机 单位时间内在垂直方向上的上升或下降速度,即飞行高度的变化速率。
- 空速: 飞机相对于周围空气的速度,也称为 相对风速。
- 电流:显示当前飞控的输入电流
- 距离:显示当前飞机离家距离
- 油门:显示飞控输出给电调的油门百分比

- 消息页面:显示飞控状态、指令反馈、警告和错误信息,它是飞行前检查、飞行中监控和问题排查的重要信息通道。

- 解锁: 一键给飞控强制解锁
- 返航: 可以在飞机进行航点任务中一键启动返航。
- 航点: 编辑设置航点任务
- AUTO: 在进行航点任务时一键启动 AUTO模式

- 姿态球: 显示当前飞控的俯仰、横滚以及航向角度

- 飞机居中锁定:可以锁定飞机当前的位置
- 飞机居中:快速定位飞机位置
- 手机居中:快速定位手机位置
- 全览:隐藏页面的功能键
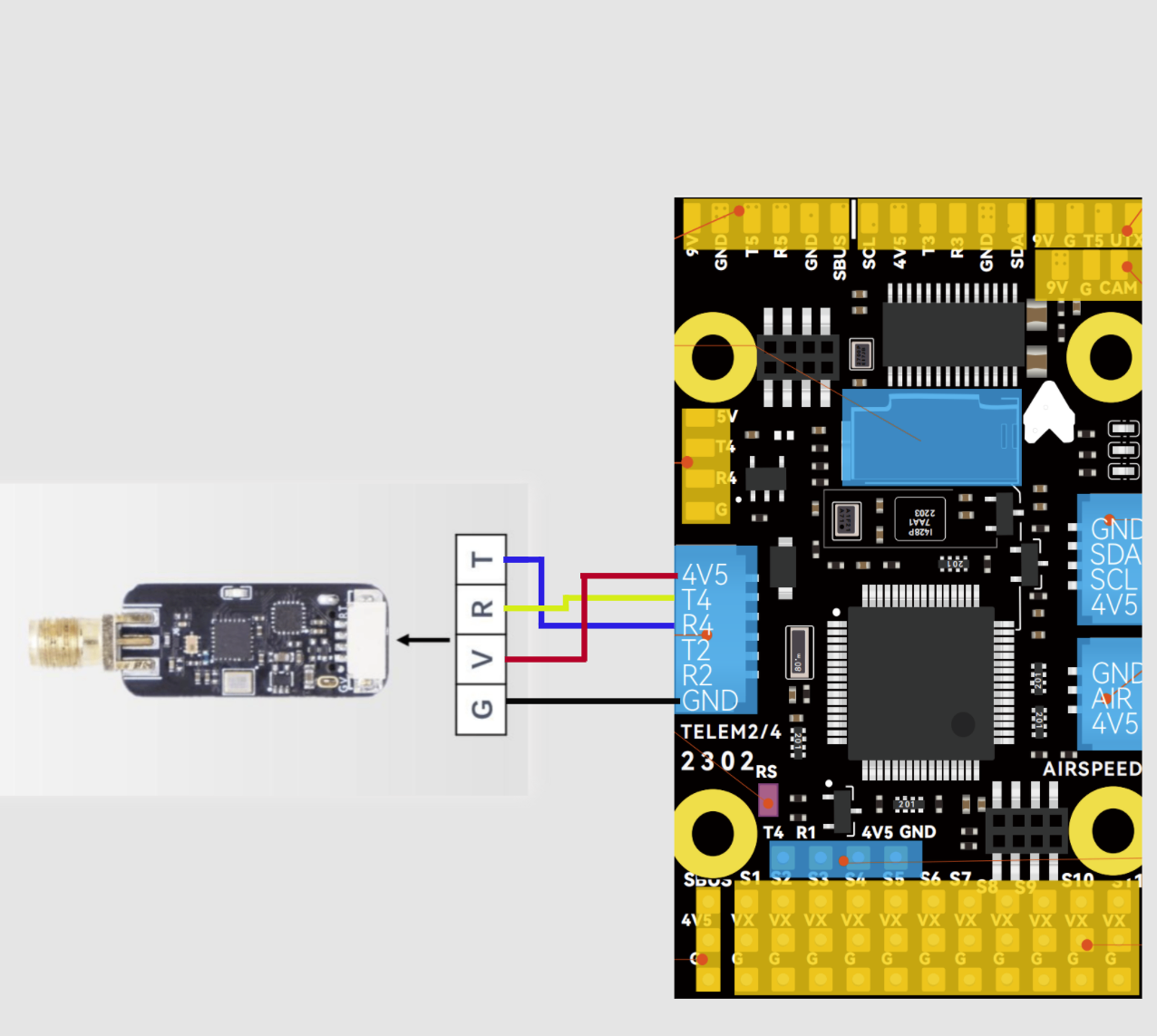
3.4 使用数传进行遥测
调参时可使用飞控自带的无线板, 在进行遥测功能时建议使用数传实现数据通信。
- 将飞控、手机与数传连接
- 点击进入 飞控调参页面
- 点击端口设置,将 SERIAL4 协议设置为 MAVLink2, 点击保存设置

3.5 设置航点任务
- 点击页面中的 航点功能,编辑航点任务
- 设置航点高度,ArduPilot固件默认高度 设置为100m, 默认航点半径 设置为90m
航点高度不要设置太低,避免在飞行过程中撞到相对较高的建筑物。

- 编辑完成航点任务,点击 上传
- 上传成功后点击 读取, 确认是否可以读取到已经上传至飞控的航点任务
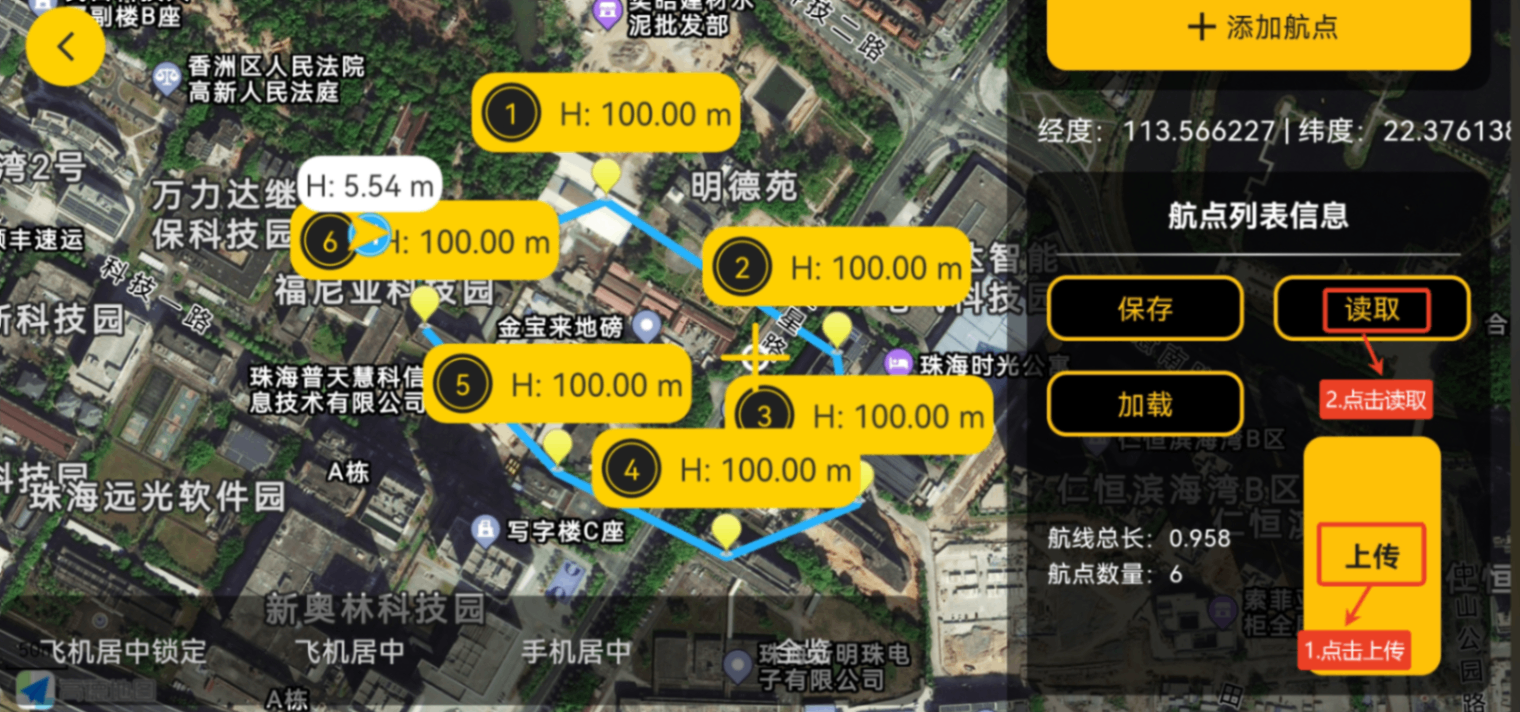
- 点击航点位置即可修改航点内容,修改完成之后 点击上传

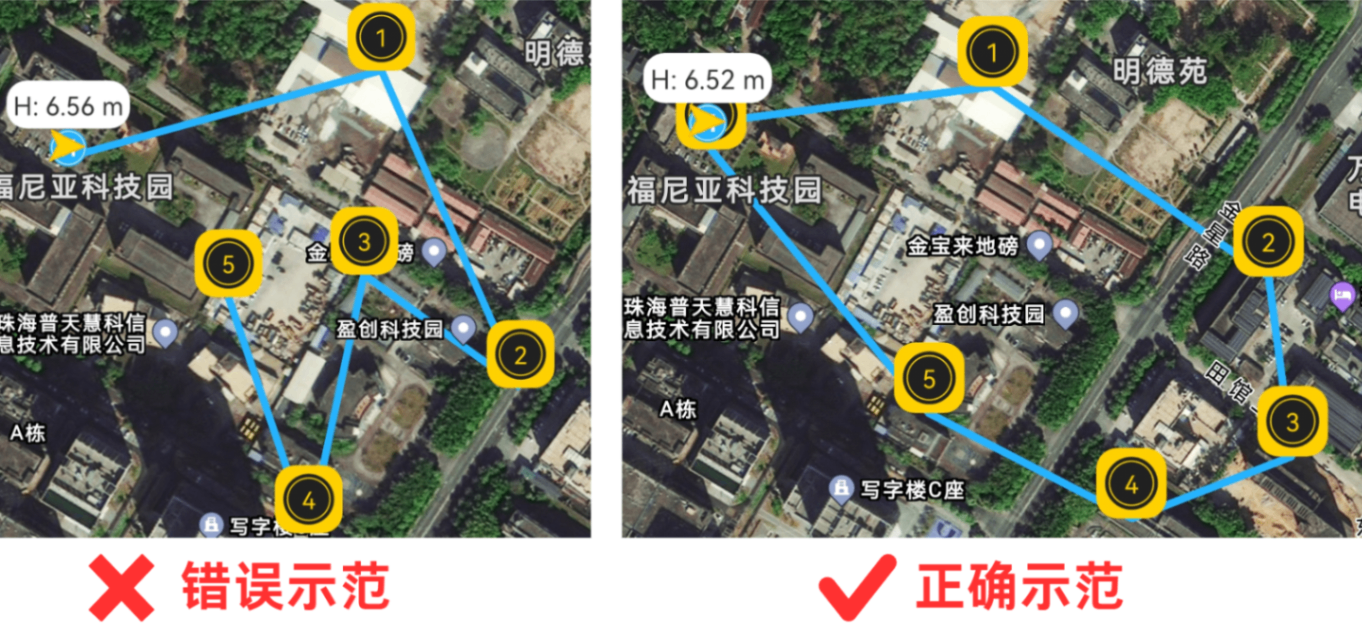
1.航线尽量不要用直角与锐角,建议多使用钝角,避免航点与航点之间的距离太近,飞机来不及转弯。
2.最后一个航点最好设置在home点附近,避免飞行器飞太远导致回传信号丢失,来不及切返航导致炸机。
航点与航点之间的高度差不要设置太大。如果需要在飞行过程中降高,建议设置多个航点,航点的高度依次下降。

3.6 航点保存/加载
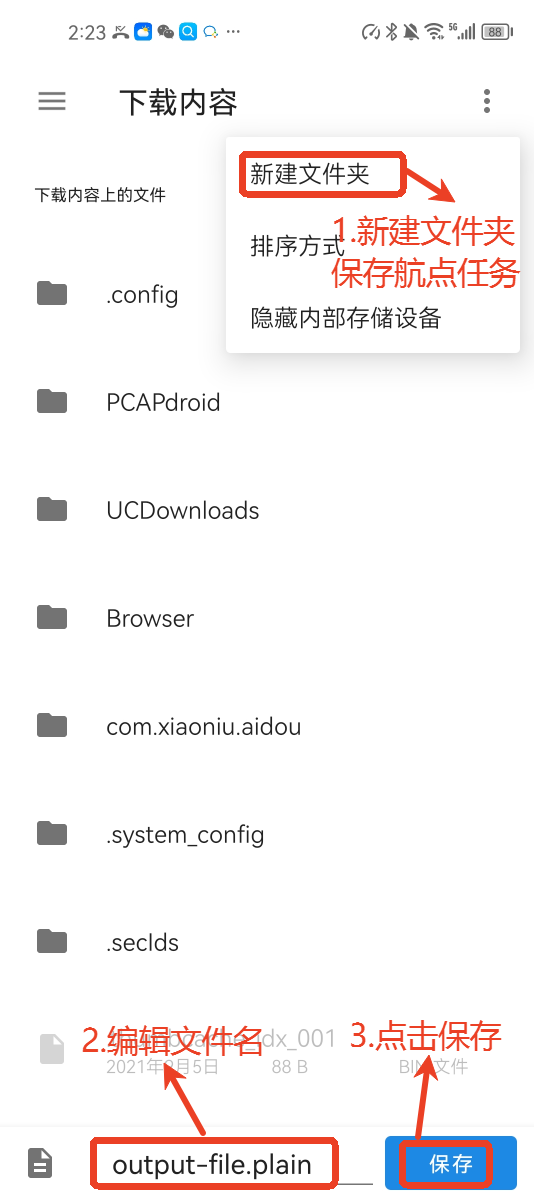
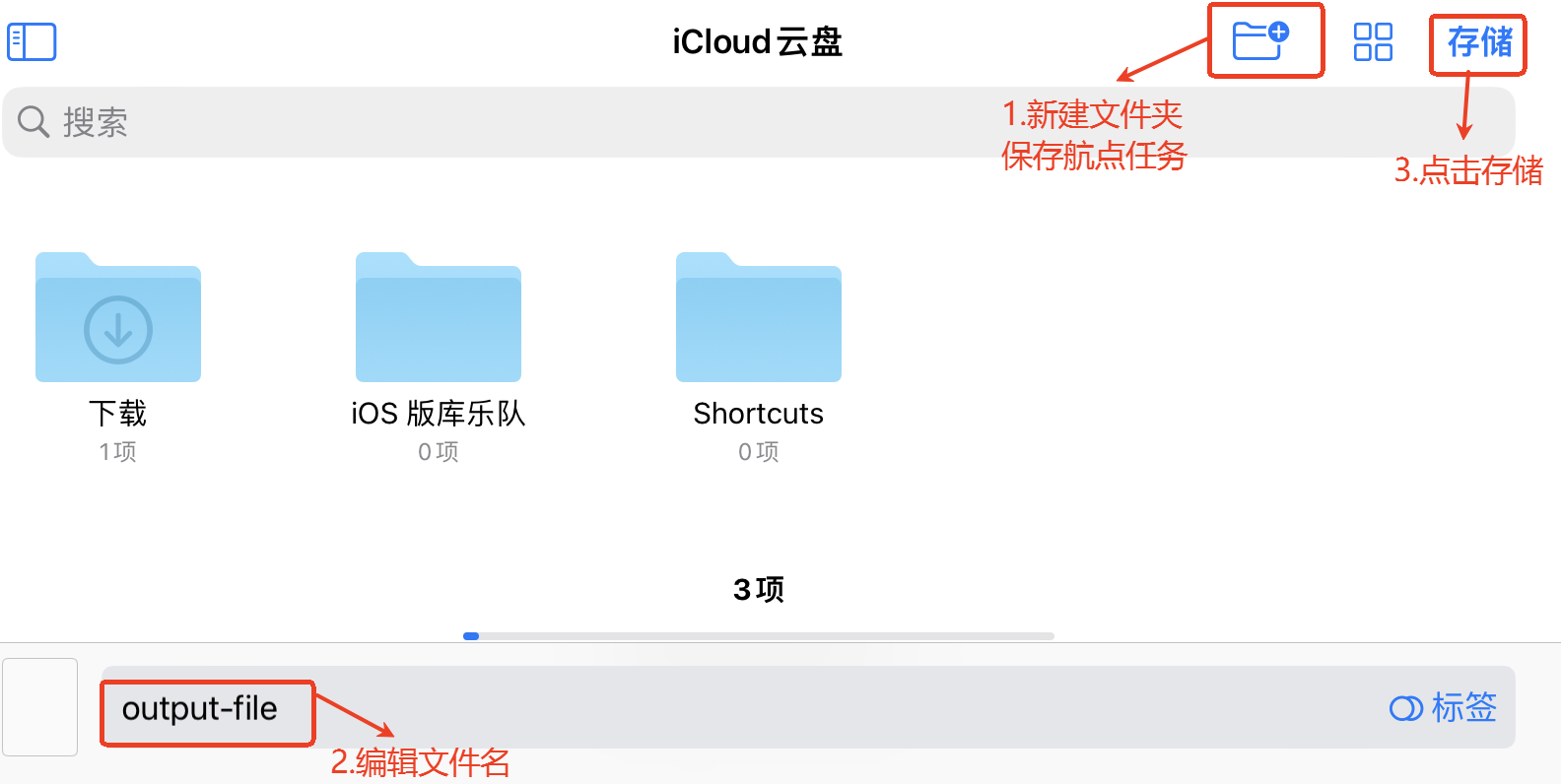
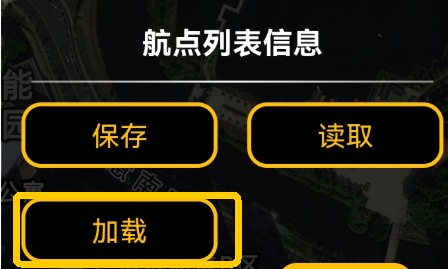
1.保存: 点击保存,将已经上传至飞控的航点任务信息保存成文件
- 安卓手机示意图:
- 苹果手机示意图:
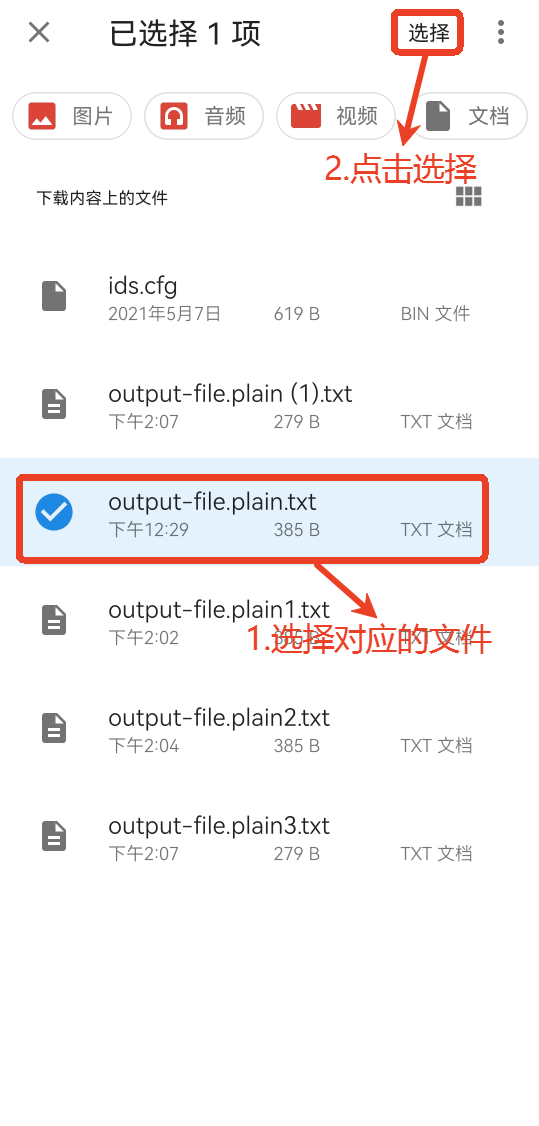
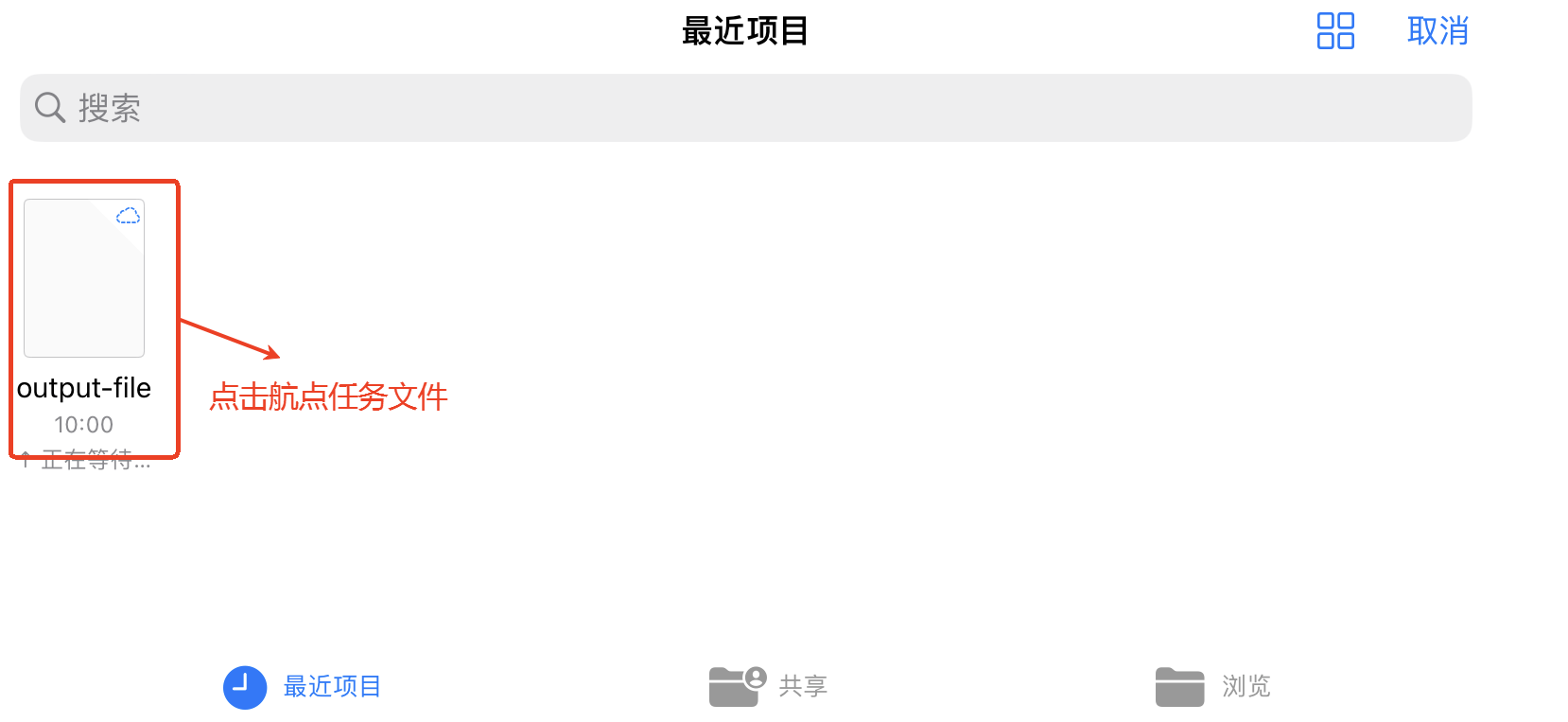
2.加载: 点击加载,将之前保存的航点任务文件加载出来, 记得点击上传才能导入飞控
- 安卓手机示意图:
苹果手机示意图:
3.6 航线飞行
1.确保飞控参数设置正确
- 已完成加速度计、指南针、罗盘校准
- 航点任务已经成功上传至飞控
2.确认GPS 信号正常,至少搜星到8颗以上
3.根据飞机实际情况正常抛飞。
4.飞机稳定飞行后,在 航点1 附近使用 一键启动AUTO模式
5.飞控自动导航飞行器进入任务模式,开始按设定的航点飞行。
在飞行过程中可以在航点功能界面查看到飞行时航线、航程、航向等信息。
四、Q&A
