如何设置解锁与上锁
2025/5/30大约 2 分钟
一、原理
ArduPilot 支持两种常见的解锁/上锁方式:
1.摇杆解锁与上锁(Rudder Arming)
2.开关解锁与上锁(Switch Arming)
解锁(Arm)是指飞控允许电机启动的状态,而上锁(Disarm)则是进入安全模式,禁止电机运行。为了确保飞行安全,飞控会在解锁前进行安全检查,若检测到异常,将不允许解锁,错误信息会显示在 地面站(Mission Planner)或 OSD 上。
二、设备准备
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)遥控器和接收机: 以 RadioMaster Boxer 和 SpeedyBee ELRS NANO 为例。
3)地面站: Mission Planner地面站。
三、具体操作
方式 1:使用摇杆解锁与上锁
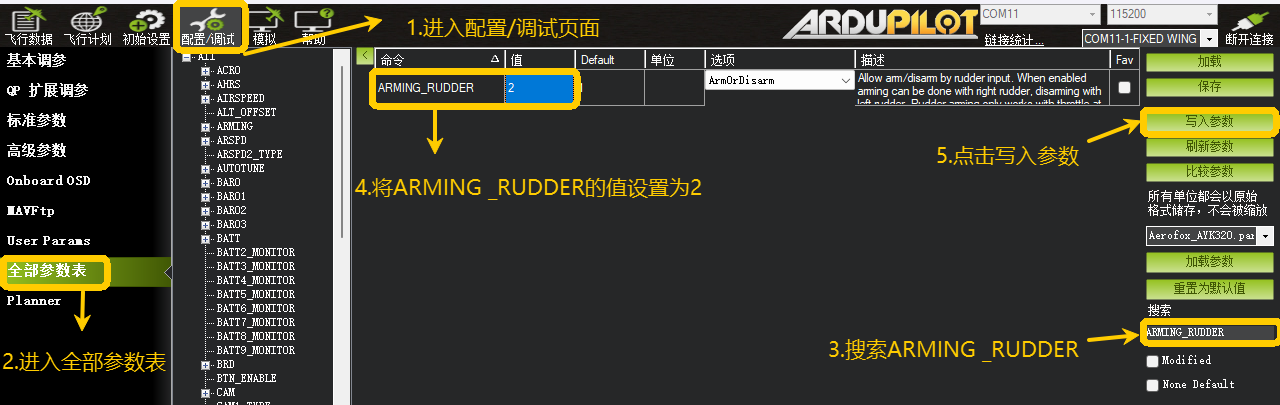
1.地面站设置
- 进入 配置/调试
- 进入 全部参数表
- 搜索 ARMING_RUDDER
- 将 ARMING_RUDDER 的值设置为 2
- 点击 写入参数
2.操作方法
1.解锁(Arming):
- 油门杆最低位
- 横滚/俯仰保持中位
- 方向舵(Rudder)推至最大(右)
- 保持 1 秒
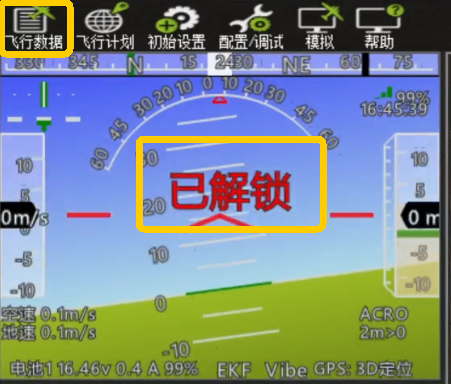
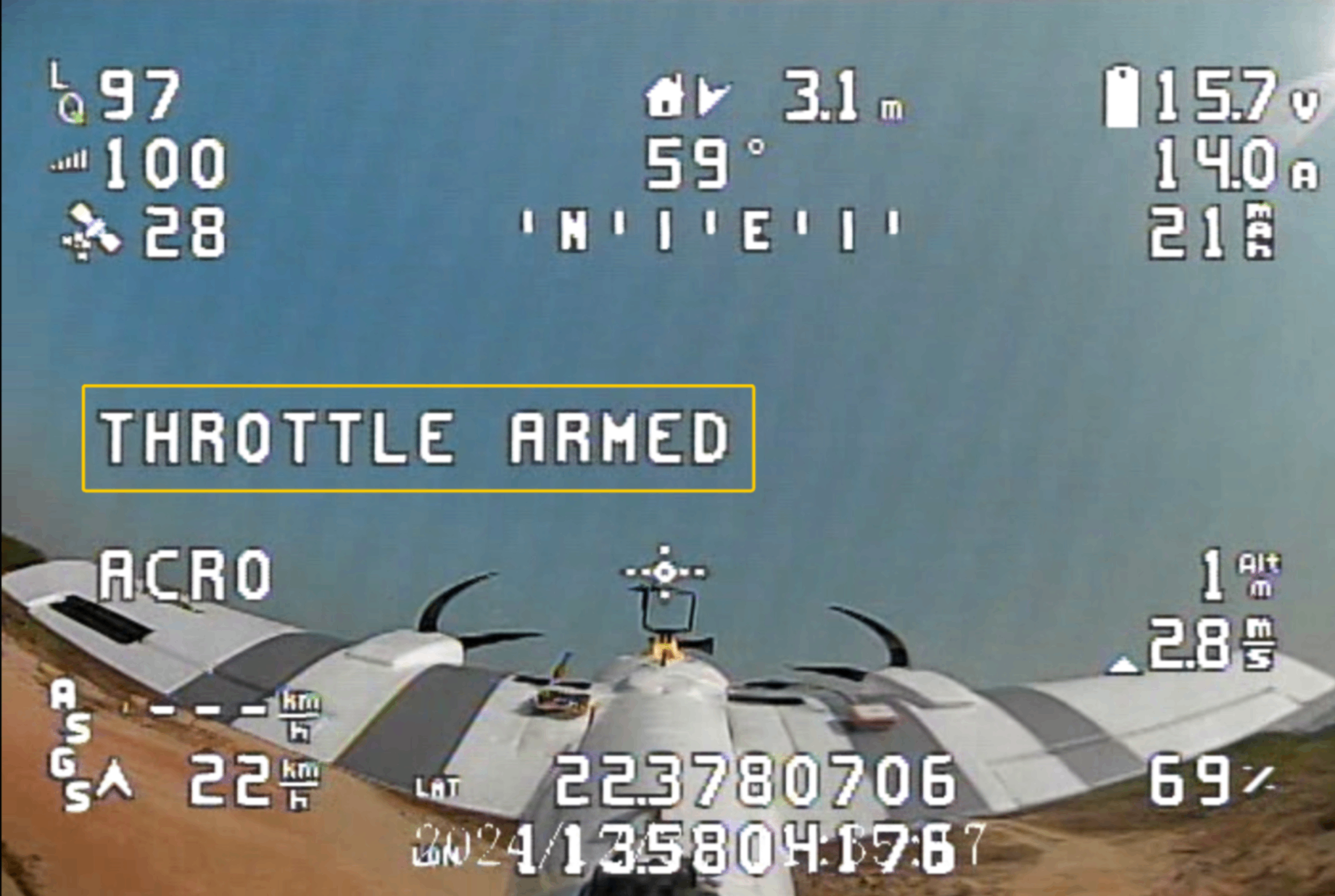
- 地面站或OSD显示已解锁(Arm)代表解锁成功
2.上锁(Disarming):
- 油门杆最低位
- 方向舵(Rudder)推至最小(左)
- 横滚/俯仰保持中位
- 保持 1 秒
- 地面站或OSD显示已解锁(Arm)代表解锁成功
方式 2:使用遥控器开关解锁与上锁
1.遥控器设置
- 选择一个 两段位开关
- 导航至 MDL/MIXES 页面,将其混控配置为 CH5

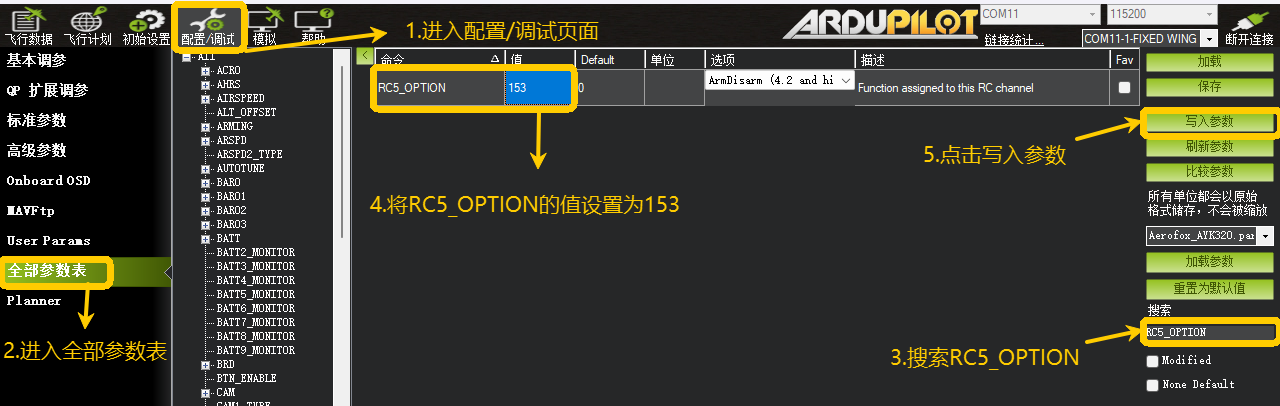
2.地面站设置
- 进入 配置/调试
- 进入 全部参数表
- 搜索 RC5_OPTION
- 将 RC5_OPTION 的值设置为 153
- 点击 写入参数
关闭摇杆解锁/上锁,请按照以下步骤进行设置:
- 进入 配置/调试
- 进入 全部参数表
- 搜索 ARMING_RUDDER
- 将 ARMING_RUDDER 的值设置为 0
- 点击 写入参数

3.操作方法
- 拨动解锁开关
- 地面站或OSD显示已解锁(Arm)代表解锁成功
4.安全检查机制
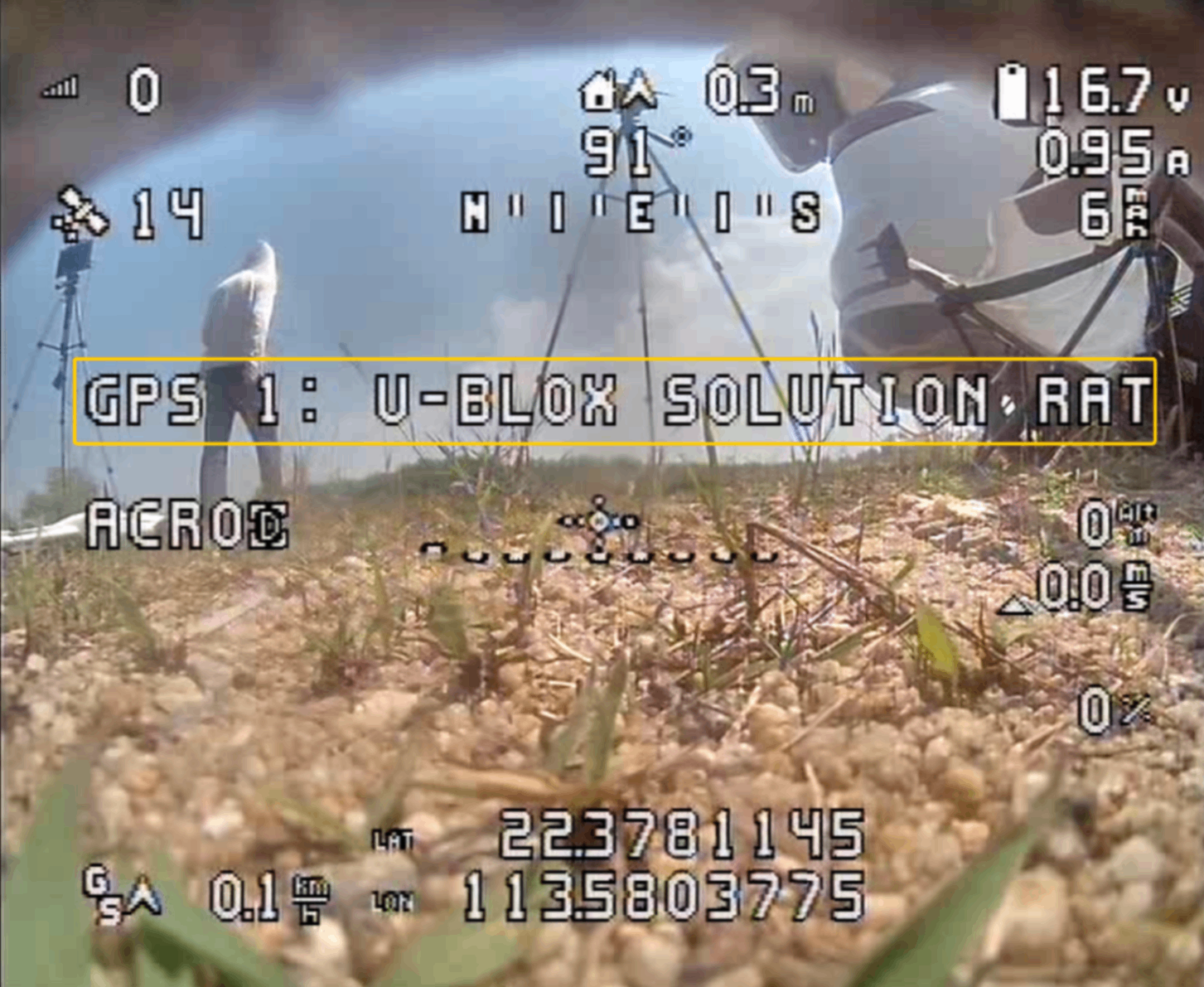
在解锁前,飞控会进行飞行前安全检查,确保满足所有解锁条件。若解锁失败,错误信息会显示在 地面站消息页面 或 OSD 上:
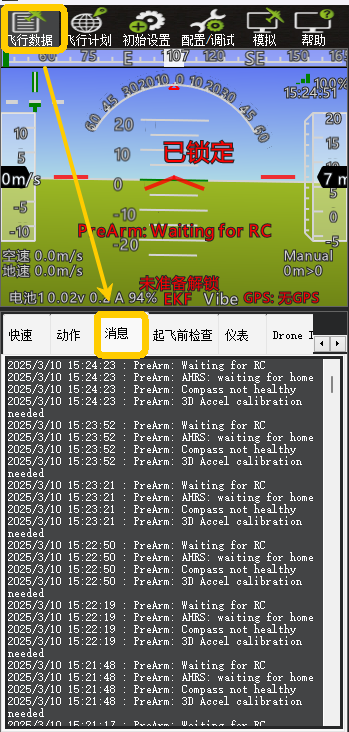
常见原因包括( 持续更新):
| 报错信息 | 可能原因 | 解决方案 |
|---|---|---|
| PreArm: RC not calibrated | 遥控器通道未校准 | 重新进行遥控器校准 |
| PreArm: GPS lock required | GPS 未锁定 | 等待 GPS 连接(至少 6 颗星) |
| PreArm: Compass not calibrated | 罗盘未校准 | 进入 Mission Planner 进行罗盘校准 |
| PreArm: Battery failsafe | 电池电压过低 | 检查电池状态并充电 |
如何设置自检项可参考该文章: https://docs.speedybee.cn/plane/ardupilot/settings/fc/prearm-check-setup.html
四、Q&A
技术支持二维码
