如何使用自动调参(Autotune)
一、原理
自动调参(Autotune)是 ArduPilot 固件提供的一种 自动优化控制参数 的功能,主要用于 改善飞机的飞行手感,提高姿态控制的精准度。
该模式会根据 飞行过程中用户的俯仰和滚转输入,自动调整 PID 增益值,使飞机在 自动模式下飞行更平稳,控制更顺滑,减少手动调参的工作量。
二、设备准备
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)已完成装机的飞机:包含遥控器,接收机,图传和FPV设备(小飞手)等。
3)地面站: Mission Planner地面站。
三、具体操作
3.1 设置自动调参模式拨杆
1)将飞控连接至电脑,打开Mission Planner地面站。
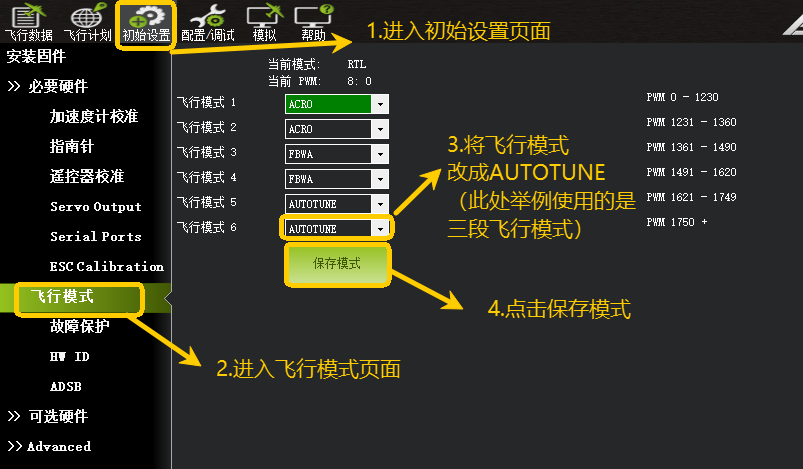
2)进入 初始设置/必要硬件/飞行模式页面,在飞行模式中设置一个飞行模式为 AUTOTUNE,点击保存模式。
注意:飞行模式默认为三段飞行模式
如何设置六段飞行模式可参考: https://docs.speedybee.cn/plane/ardupilot/settings/rc/sixpos-switch.html
3.2 飞行执行自动调参
3.2.1 进入 AUTOTUNE 模式
1.起飞后,保持飞机平飞。
2.确保飞行稳定切换飞行模式至 AUTOTUNE。
3.2.2 进行横滚自动调参
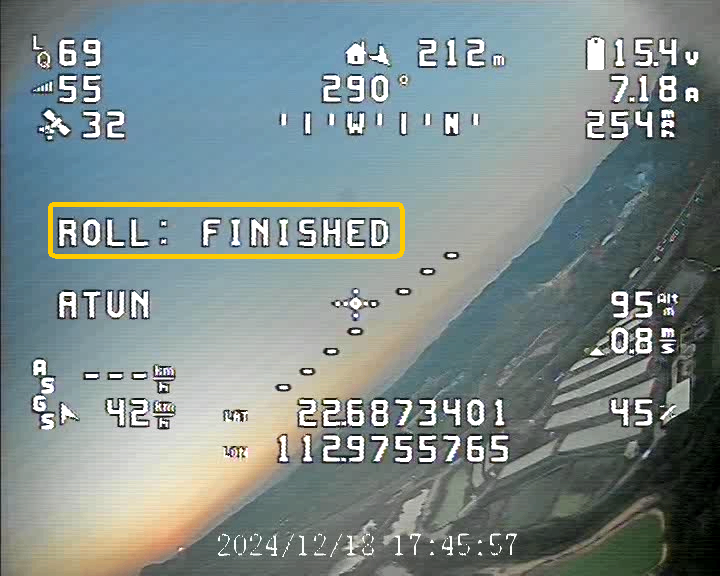
1.在 平飞过程中,进行 滚转(Roll)自动调参:
- 先向左打满摇杆,达到 最大左滚转角度。
- 快速回到中位。
- 再向右打满摇杆,达到 最大右滚转角度。

- 直到 OSD 显示 "ROLL FINISH"。
3.2.3 进行俯仰自动调参
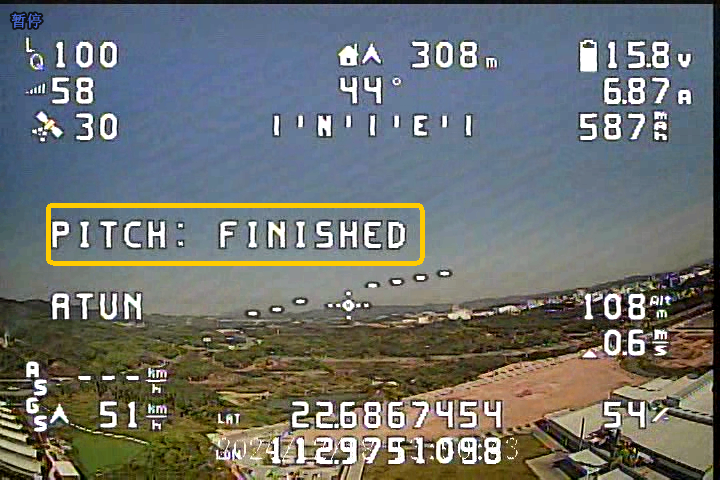
1.当 滚转调参完成 后,开始 俯仰(Pitch)自动调参:
- 向上拉满摇杆,达到 最大俯仰角度。
- 快速回到中位。
- 向下推满摇杆,达到 最大俯仰角度。

- 直到 OSD 显示 "PITCH FINISH"。
结果验证
1.切换至 FBWA 模式,观察飞机的滚转和俯仰响应是否顺滑,无明显抖动或迟缓。
2.进行几次俯仰、滚转测试,确保新的 PID 设定能提供稳定的控制感受。
3.降落后上锁保存参数。
四、Q&A
Q:不同的天气情况下自动调参的参数会有所变化吗?
A:是的,在大风天下的自动调参参数不一定适用于微风的天气,有可能在微风天气飞机会抖动,建议在天气变化时重新进行自动调参,以保证有良好的飞行体验。
技术支持二维码
