如何进行遥控器校准
2025/5/30大约 2 分钟
一、原理
遥控器是无人机的主要控制设备,不仅用于操控飞行,还可用于切换飞行模式、返航等辅助功能。通过 地面站 对 遥控器 校准,可以捕获各个遥控通道的 最大值、最小值和中位值,确保飞控能够正确解析遥控器输入,提升飞行时的操作准确性。
校准后,飞控能够:
- 识别摇杆的最大/最小行程,确保精准控制;
- 设定正确的舵面与油门范围,避免异常抖动或失控;
- 使飞行模式切换、解锁、返航等操作准确生效。
二、设备准备
1)飞控: SpeedyBee F405 WING APP/ SpeedyBee F405 WING MINI/ SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)遥控器: 任意遥控器均适用于该教程。
3)接收机: 与遥控器的对应的接收机
4)地面站: Mission Planner地面站。
三、具体操作
1.遥控器硬件死区校准
遥控器死区校准可参考对应遥控器的说明书进行校准。
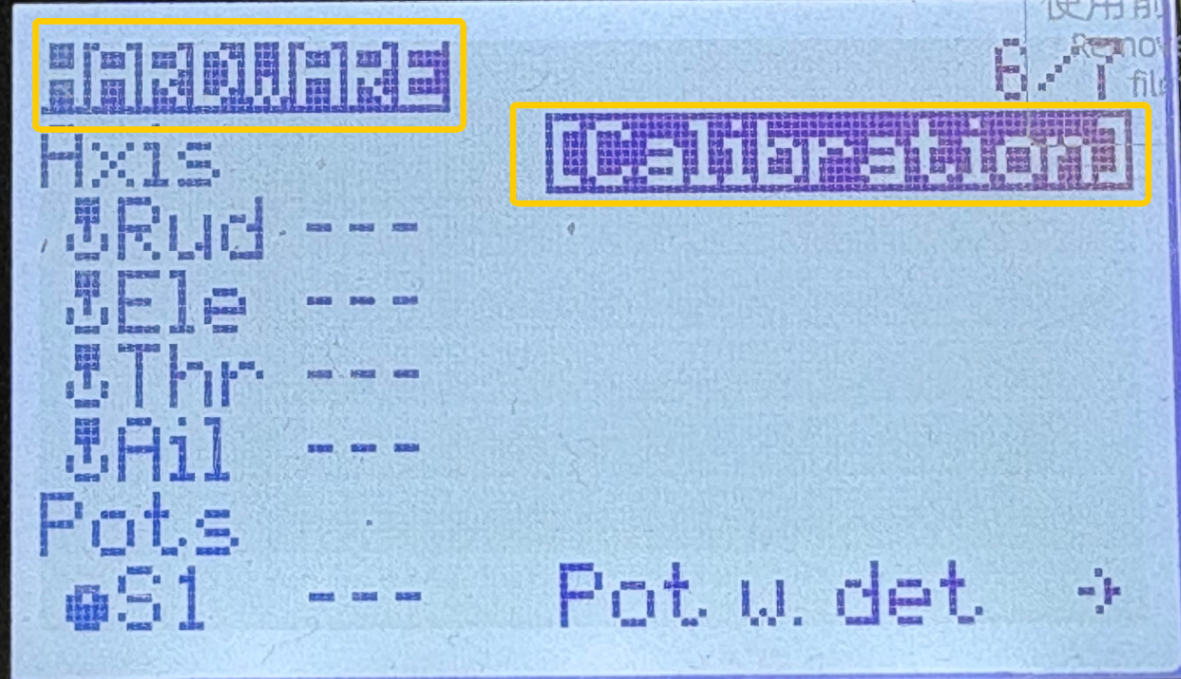
以EdgeTX系统如何进行遥控器硬件死区校准为例:
- 导航至SYS-HARDWARE页面
- 点击Calibration
- 按操作步骤进行遥控器死区校准
2.遥控器与接收机对频
ELRS遥控器与接收机对频可参考该文章: https://docs.speedybee.cn/plane/ardupilot/settings/rc/elrs-bind.html
3.遥控器校准
- 使用USB数据线将飞控连接至Mission Planner地面站。
- 进入初始设置。
- 进入遥控器校准页面。
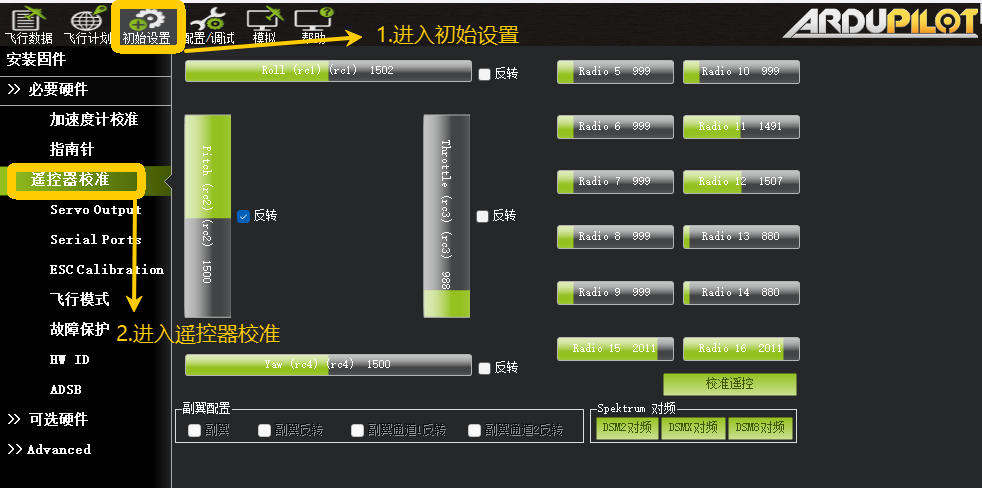
- 确保遥控器校准界面有数据,无数据检查接收机和遥控是否对频和接收机接线。

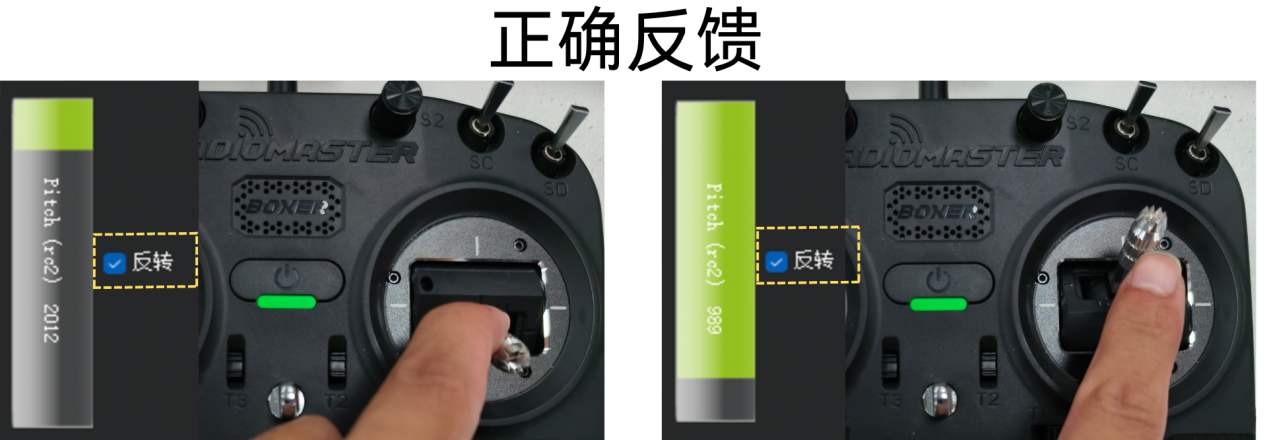
确认通道反馈是否正确
- PITCH(俯仰):前推摇杆,值 减小;后拉摇杆,值 增大;

- ROLL(横滚):右推摇杆,值增大;左推摇杆,值减小;


- YAW(偏航):右推摇杆,值增大;左推摇杆,值减小;


- Throttle(油门):推高油门,值增大;拉低油门,值减小。


- 点击校准遥控→有提示则点击OK→将遥控器拨杆和摇杆均操作至最大值和最小值→点击完成时点击→弹窗显示→点击OK→校准完成。


四、Q&A
技术支持二维码
