ArduPilot如何设置通道映射
一、原理
通道映射(Channel Mapping)是指遥控器通道与飞控输出端口之间的对应关系,确保飞行时遥控器输入的动作(如副翼、升降、油门、方向)能准确地被飞控转换为伺服舵机或电调的控制输出。
在 ArduPilot 飞控中,飞控的输出通道编号(1、2、3、4……)分别对应飞控上的物理输出接口(S1、S2、S3、S4…),飞控输出端口接入舵机或电调,从而实现飞行姿态控制和动力控制。
例如:
- 如果在飞控的输出端口设置中,将通道1设置为副翼,则飞机副翼舵机必须连接至飞控的输出端口 S1。
二、设备准备
1)飞控: SpeedyBee F405 WING APP / SpeedyBee F405 WING MINI /SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)遥控器和接收机:例如 RadioMaster Boxer和SpeedyBee ELRS NANO。
3)地面站: Mission Planner地面站。
4)飞机上的舵机或电机
三、具体操作
步骤1:进入Servo Output(舵机输出)页面
- 使用USB数据线连接飞控与电脑,打开Mission Planner软件,完成飞控连接。
- 点击初始设置→进入必要硬件→选择Servo Output页面。
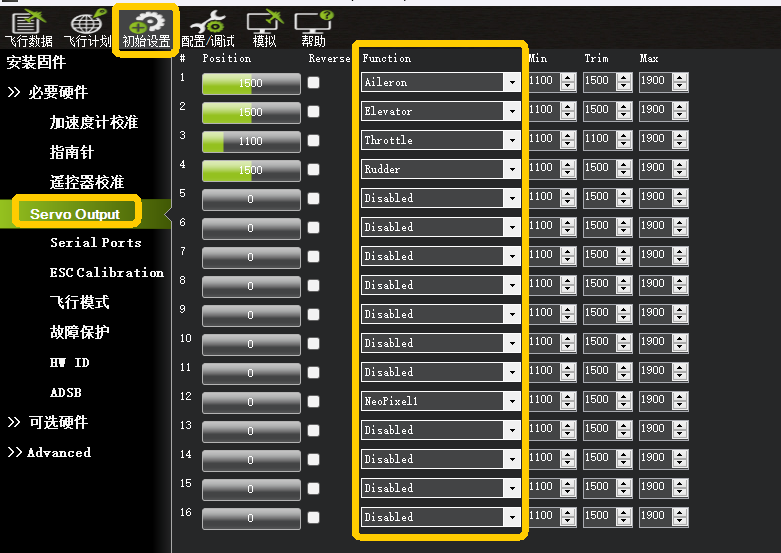
步骤2:设置通道映射
1.根据机型需求,逐一对每个通道进行功能分配:
- 副翼(Aileron)
- 升降舵(Elevator)
- 油门(Throttle)
- 方向舵(Rudder)
- 襟翼(Flap)
- 其他自定义通道(如摄像头云台、开关等)
2.设置示例如下:
| Servo Output 通道 | 功能选择示例 | 物理端口连接 |
|---|---|---|
| 1 | Aileron(副翼) | S1→副翼舵机 |
| 2 | Elevator(升降) | S2→升降舵机 |
| 3 | Throttle(油门) | S3→电调 |
| 4 | Rudder(方向) | S4→方向舵机 |
⚠️注意:
1.如果只配置了一个副翼通道,且飞机有左右两个副翼舵机,则需使用“Y”型舵机线(2合1)连接后插入对应端口。
2.若副翼舵或升降舵分开接线,需在Servo Output中选择
Aileron left/right、Elevator left/right进行分别映射。
步骤3:确认遥控器与飞控通道对应关系
⚠️注意:请不要使用电池给飞控供电,或将飞机的桨叶卸除。
1.强制解锁飞控,如何强制解锁可参考该文章:
2.摇动遥控器摇杆,观察通道值变化是否正确反映摇杆操作:
- 左右摇副翼杆,副翼通道数值应明显变化;
- 前后拉俯仰杆,升降通道数值应明显变化;
- 推油门杆,油门通道数值随之变化;
- 左右拨动方向杆,方向舵通道数值明显变化。
✅ 若通道反应与摇杆输入相对应,则通道映射设置成功。
步骤4:设置结果验证
飞控上电后,遥控器进行模式切换并拨动各通道,观察舵机、电机响应情况:
- 遥控器输入与舵机、电机响应方向需正确对应,若出现反向可在 Servo Output 页面勾选
Reverse开关进行修正。 - 如何判断舵面响应是否正确可参考该文章: https://docs.speedybee.cn/plane/ardupilot/settings/fc/dir-check.html
四、Q&A
技术支持二维码
