Matek MLRS 2.4G MR24-30如何使用Mavlink进行遥测
一、MLRS使用Mavlink进行遥测的工作原理
MLRS模块相较传统遥控+数传方案
Matek MLRS 2.4G 模块将遥控功能和数传功能整合到一个设备中,实现了数遥一体,具有以下优势:
1.设备精简:只需配置一个模块,既可完成遥控信号上行,又可实现数传双向通信,减少设备数量和连接复杂性。
2.信号抗干扰性强:遥控信号和数传数据共用同一无线电链路,减少干扰。
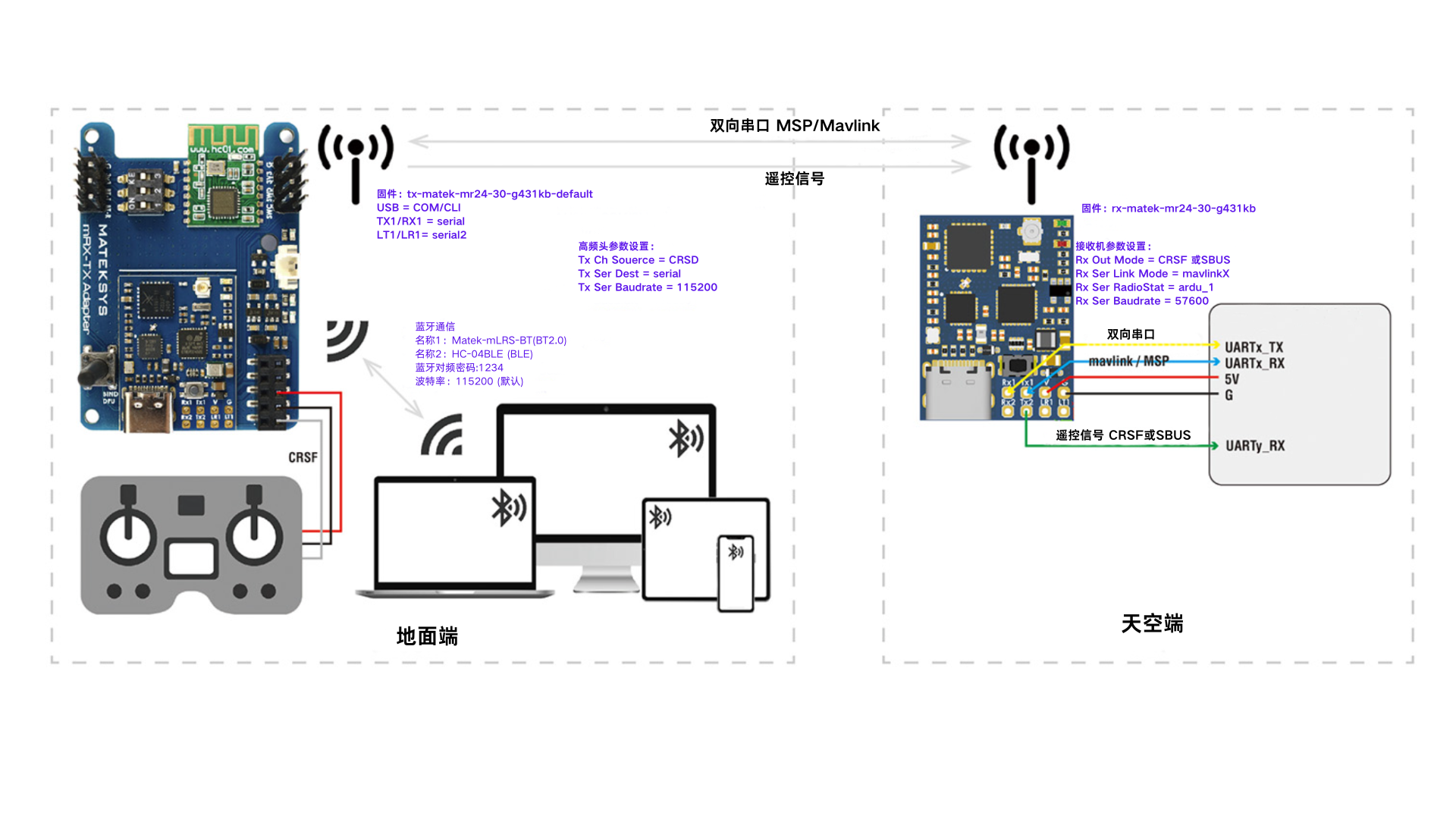
MLRS Mavlink通信工作原理
1.遥控器信号上行
- 遥控器通过MLRS高频头,将控制信号(例如摇杆和开关操作)以无线电信号形式发送至飞控。
2.数传双向通信
- 飞控通过MLRS接收机,将飞行数据(例如GPS位置、电池电量、飞控状态)以无线电信号回传至高频头,移动设备通过蓝牙连接高频头查看飞行数据。
- 移动设备可通过蓝牙连接MLRS高频头发送无线电信号配置飞控参数,实现无线调参。
二、设备准备
实现该功能需要准备以下设备:
1.飞控: SpeedyBee F405 WING APP或SpeedyBee F405 WING MINI;
2.高频头: MATEK MLRS 2.4G 高频头 MR24-30-TX;(建议您购买3D打印外壳,或者自行打印外壳)
3.接收机: MATEK MLRS 2.4G 接收机 MR24-30-RX;
4.遥控器:Radiomaster Boxer 遥控器-仅供参考(其他具备JR仓的遥控器可以直接使用高频头,无JR仓的遥控需要购买转接器)。

高频头外壳3D打印文件:
三、遥控器固件升级和Lua脚本导入
1、遥控器系统升级
✳使用MLRS高频头需将遥控器EdgeTx系统升级至2.9.x或更高版本。
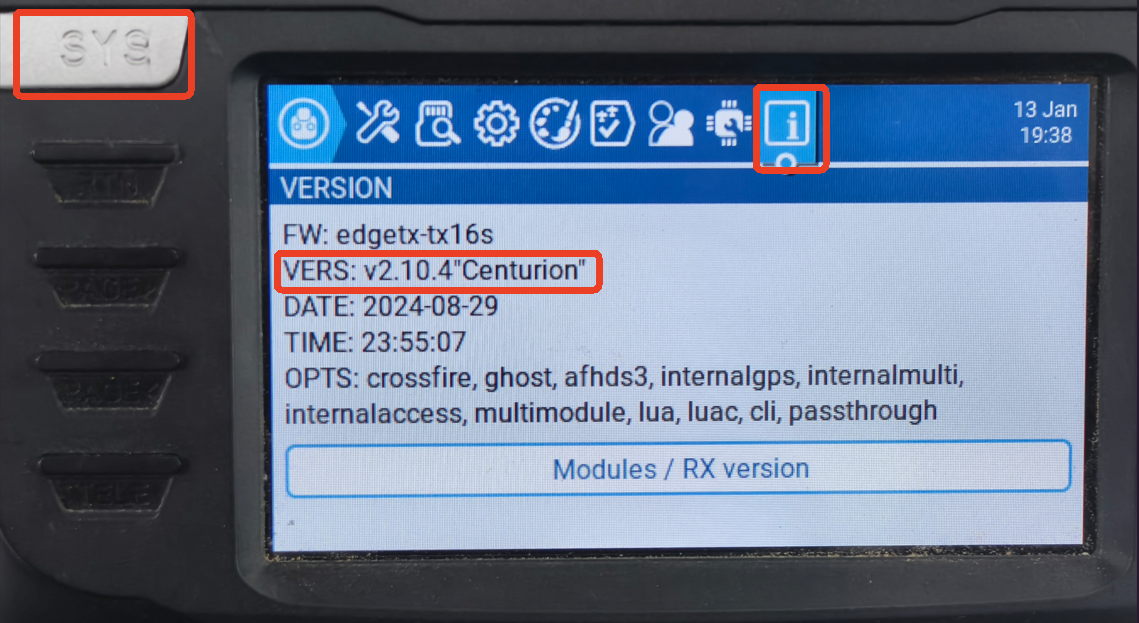
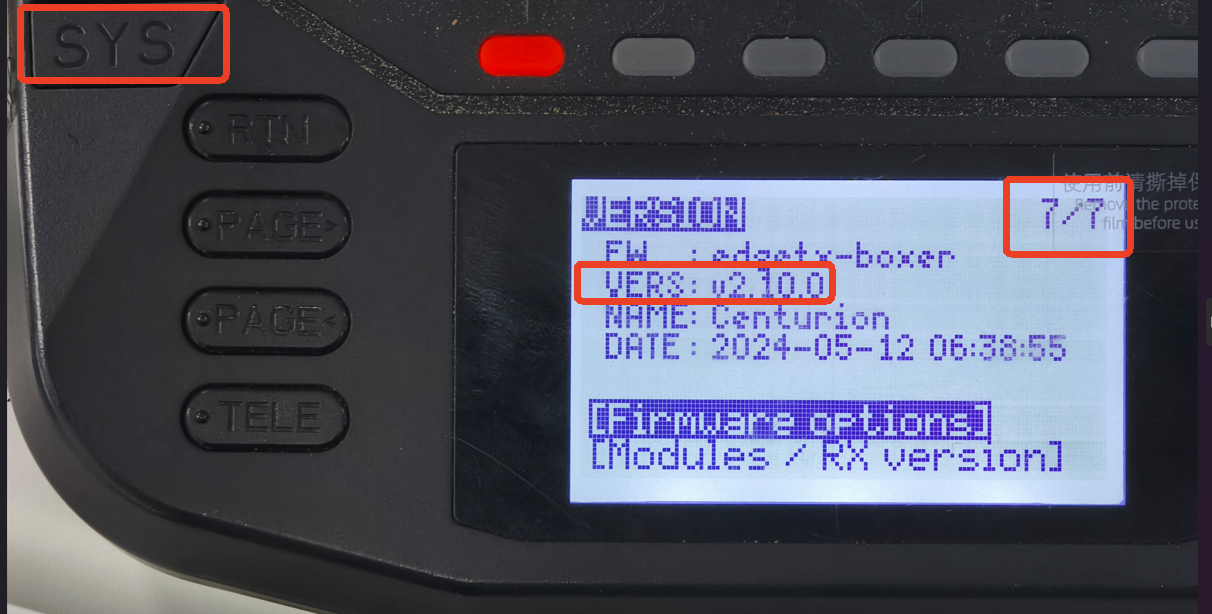
1)检查遥控器的系统版本,是否大于此功能所需的最低版本。
进入遥控器SYS系统菜单→VERSION界面→查看“VERS”。
彩色屏幕:
黑白屏幕:
2)遥控器系统升级可以参考以下文章: https://docs.speedybee.cn/plane/other/edgetx/buddy-fw-update.html
2、Lua脚本导入
1)mLRS Lua脚本下载:
※如果使用的遥控器是480*272的彩色屏幕(例如 Jumper T16、Radiomaster TX16S),请下载“mLRS.lua”文件。
※如果使用的遥控器是黑白屏幕(例如Radiomaster Boxer),请下载“mLRS-bw.lua”文件。
2)导入Lua脚本可以参考以下文章: https://docs.speedybee.cn/plane/other/elrs/lua-script.html
3、MLRS高频头与接收机设置
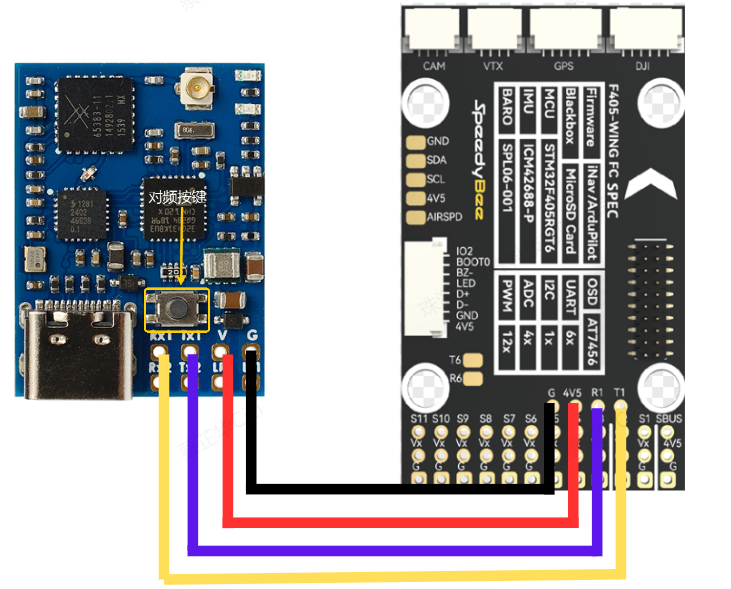
1)接收机连接飞控:
将接收机的杜邦头焊接好,插入到飞控的CRSF接收机的接口,确保接收机的TX连接飞控的RX,接收机的RX连接飞控的TX。
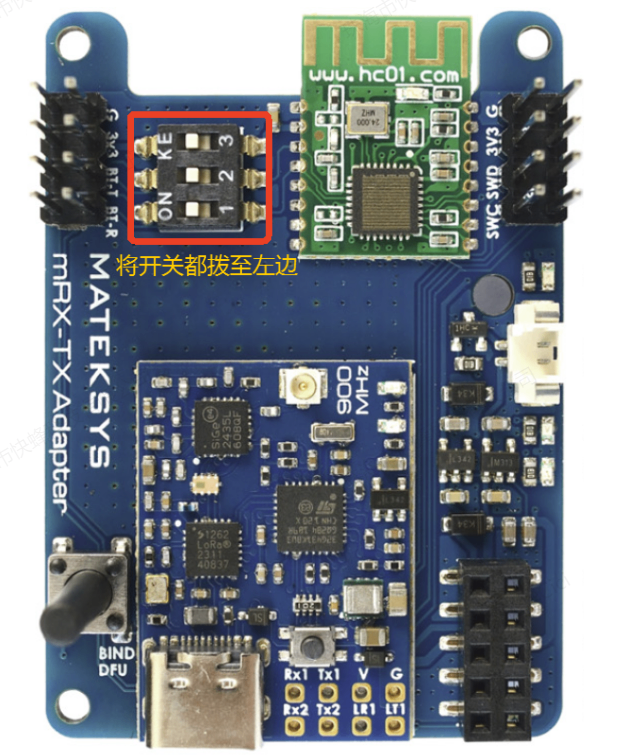
2)高频头启用蓝牙模式:
将高频头的DIP开关全部拨向"ON"/左侧位置,此时mLRS高频头将启用蓝牙模式。
3)遥控器设置:
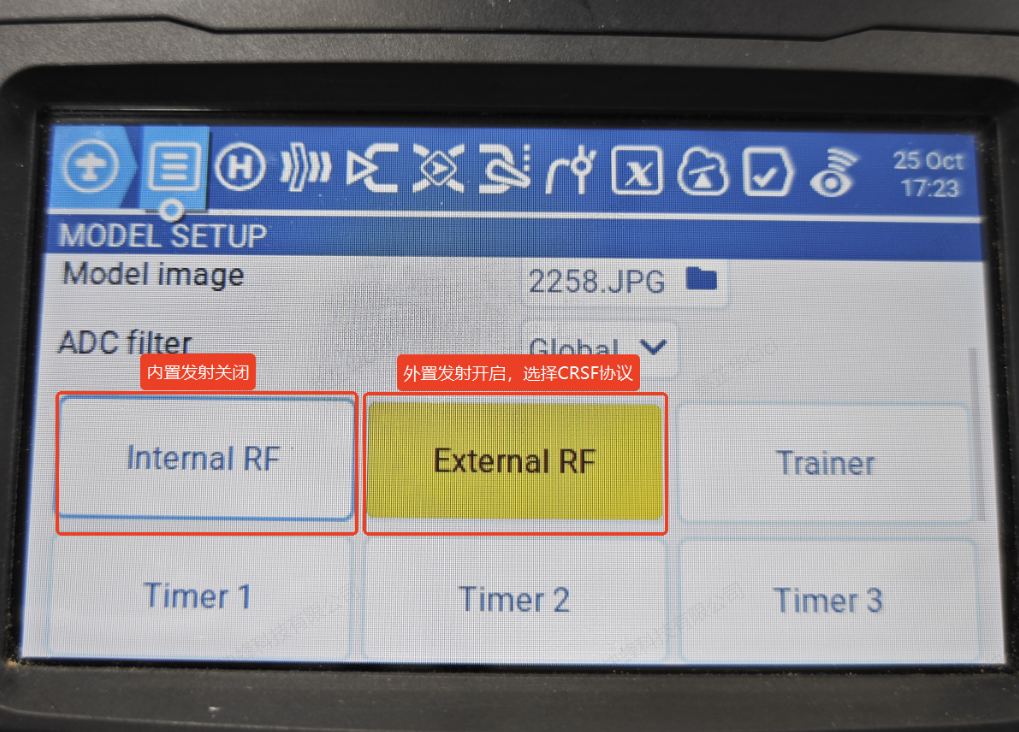
①因为mLRS官方仅支持400k的波特率,所以在EdgeTX/OpenTX系统中,进入MDL→MODEL SETUP,将内部射频关闭,打开外部射频,协议选择CRSF,波特率设置为400k。
②彩色屏幕设置:
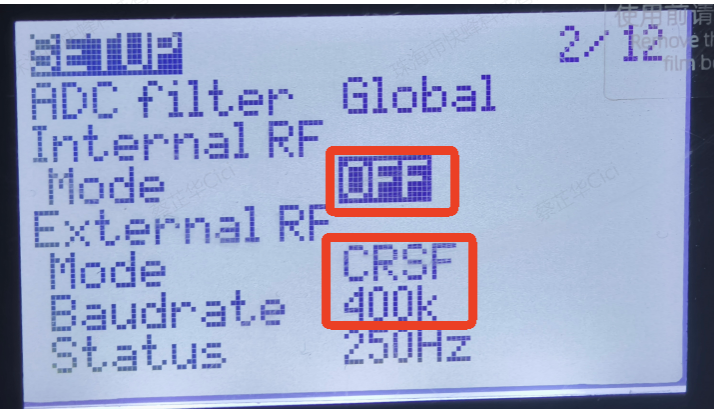
③黑白屏幕设置:
| 参数 | 设置为 |
| 内置射频关闭 |
| Internal RF | OFF |
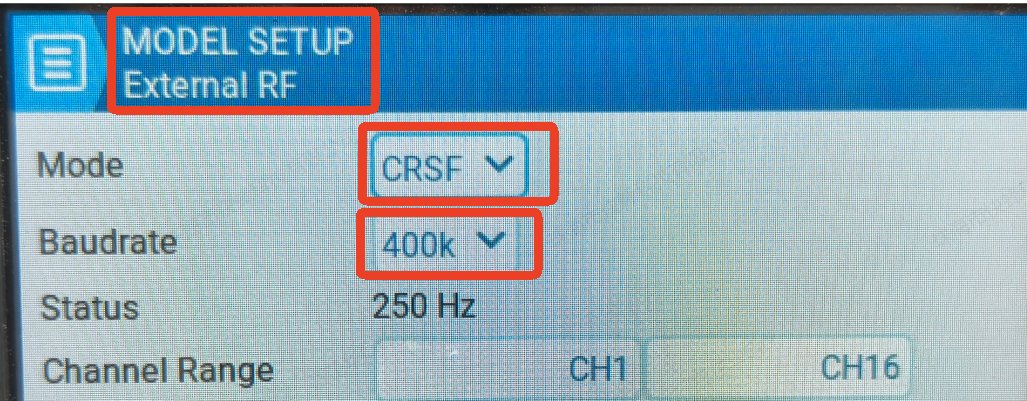
| 外置射频开启并设置参数 |
| External RF | |
| Mode | CRSF |
| Baudrate | 400k |
4)将高频头与接收机对频:
接收机进入对频模式操作方法:
方法一:按下接收机上的对频按键4秒,1号指示灯和2号指示灯,黄绿交替闪烁,代表已进入对频状态;
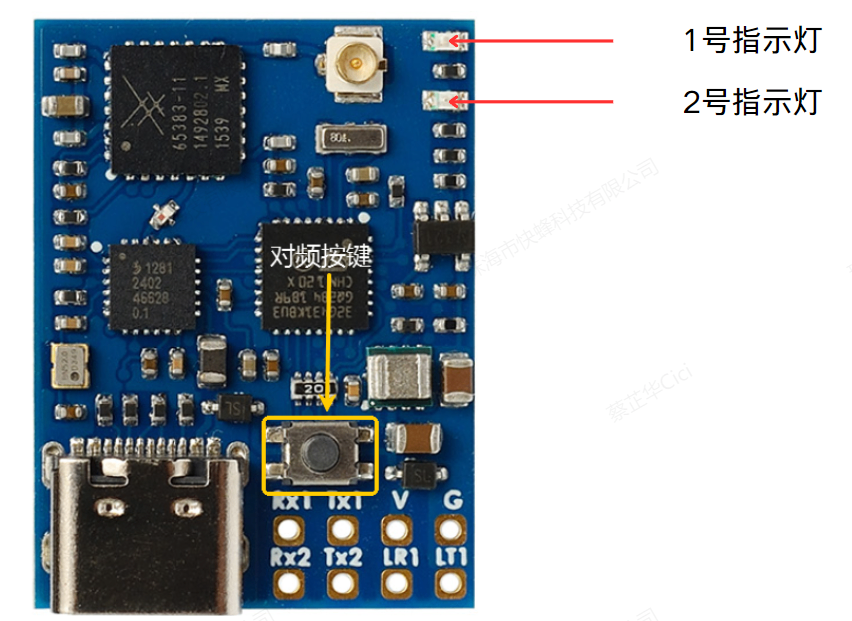
- 方法二:快速通断电重启接收机3次,接收器将在第 4 次通电时进入对频模式, 1号指示灯和2号指示灯,黄绿交替闪烁,代表已进入对频状态。
高频头进入对频模式操作方法:
- 方法一:按下高频头背后的对频按键4秒, 3号指示灯和4号指示灯,黄绿交替闪烁 ,代表已进入对频状态;
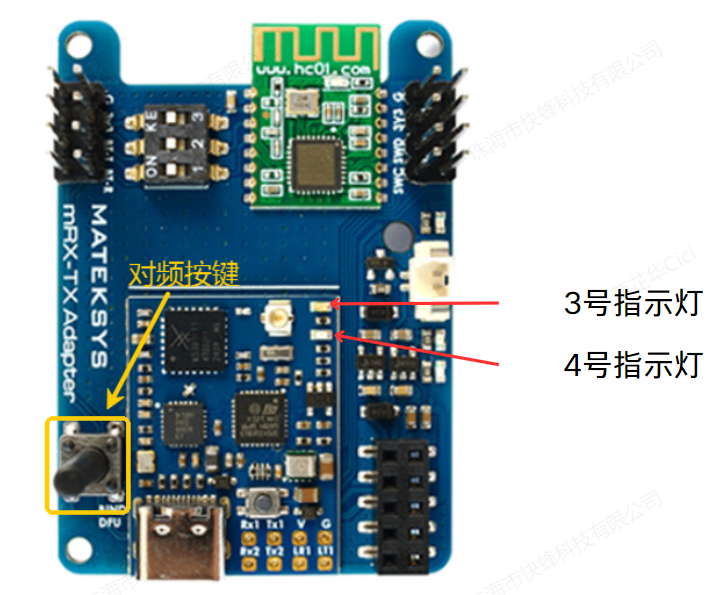
- 方法二:通过mLRS Lua脚本进入绑定模式, 3号指示灯和4号指示灯,黄绿交替闪烁,代表已进入对频状态。
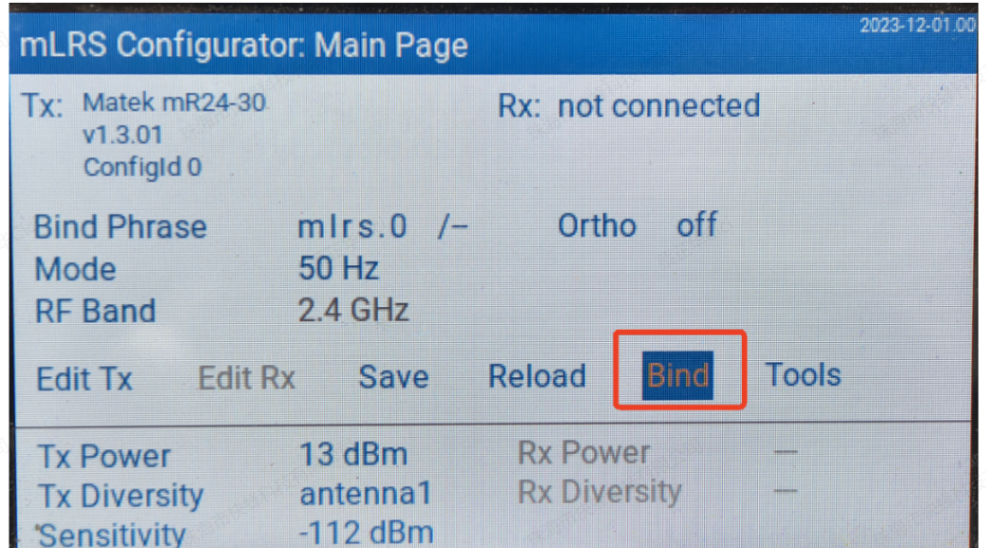
彩色屏幕:
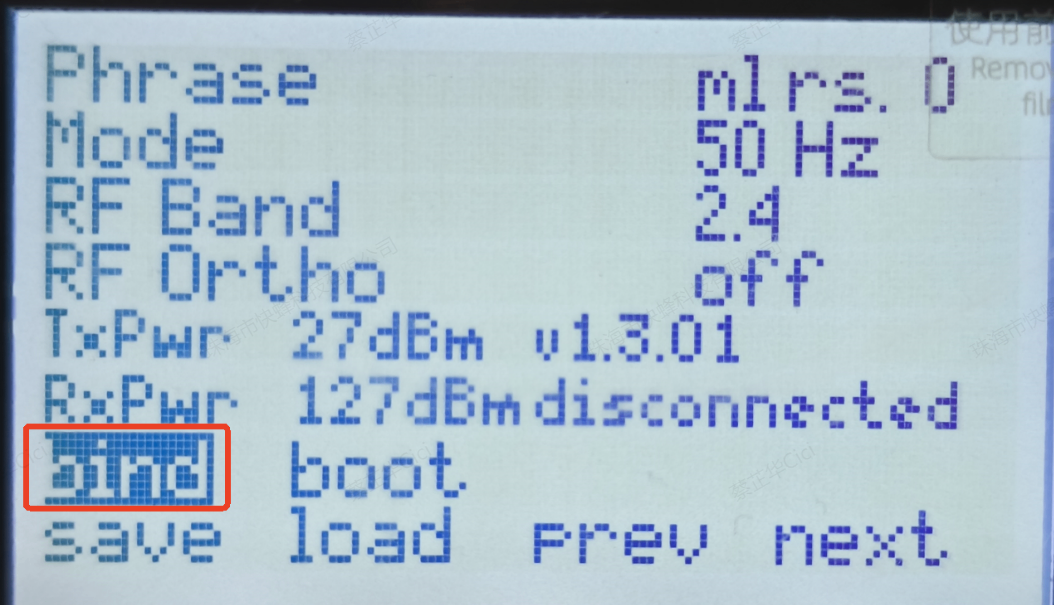
黑白屏幕:
| 对频成功后指示灯状态 |
| 接收机 | 1号指示灯 | 黄色缓慢闪烁 |
| 2号指示灯 | 熄灭 |
| 高频头 | 3号指示灯 | 黄色缓慢闪烁 |
| 4号指示灯 | 熄灭 |
5)参数设置
高频头参数设置:
①进入Lua脚本,修改以下参数设置;
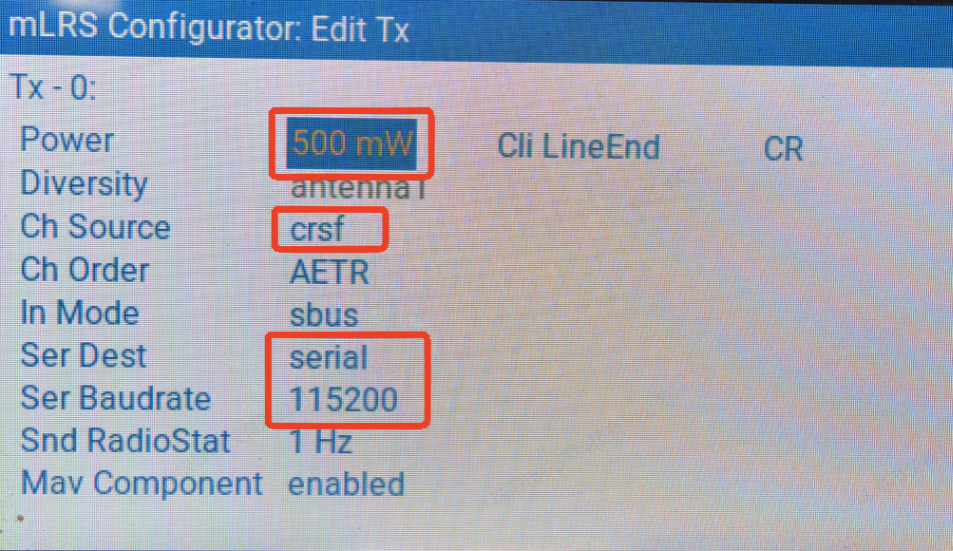
②彩色屏幕:点击Edit Tx,进入高频头参数编辑:
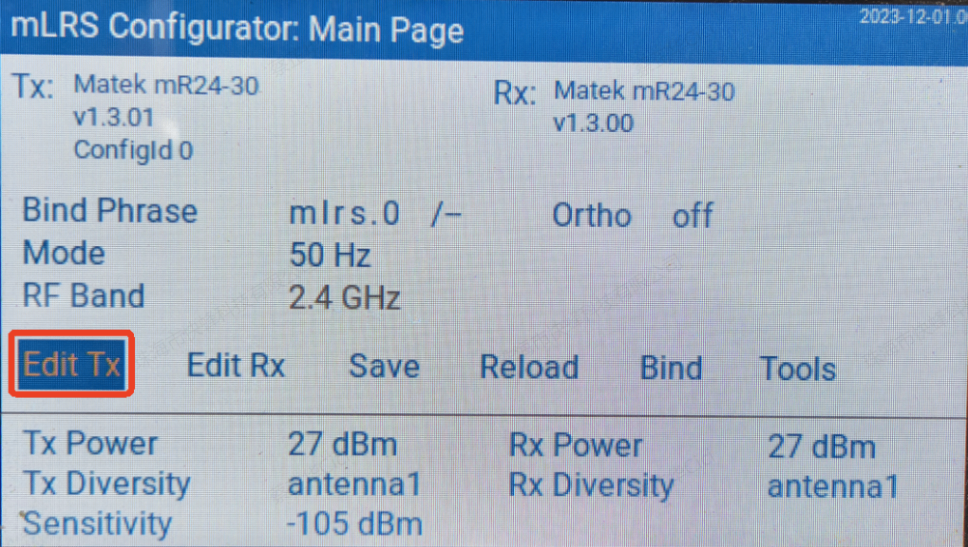
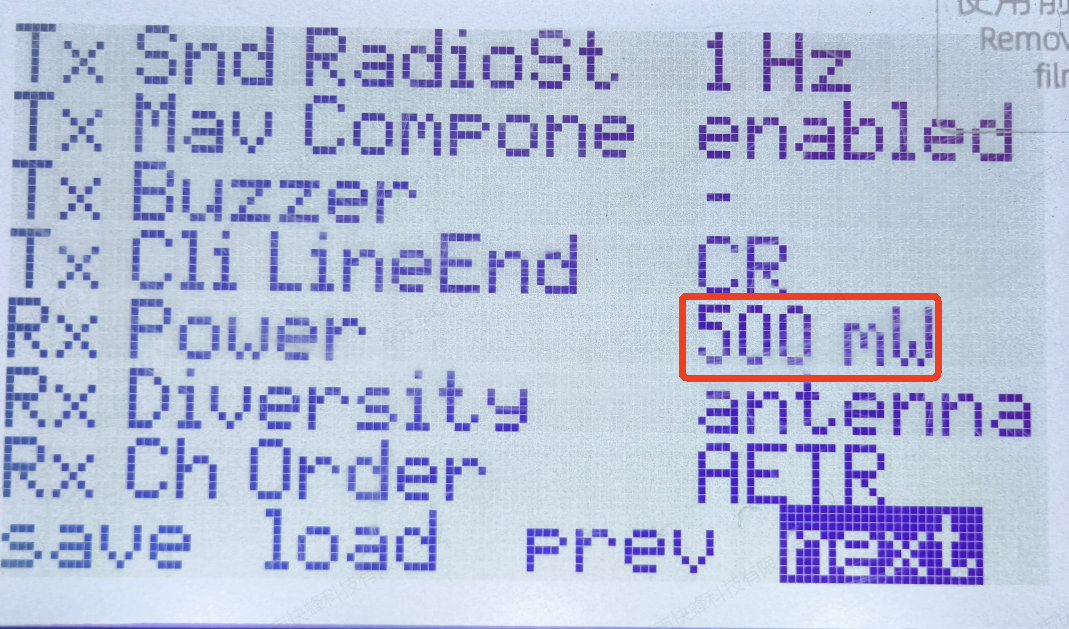
或者黑白屏幕:点击next,找到Tx的相关参数。
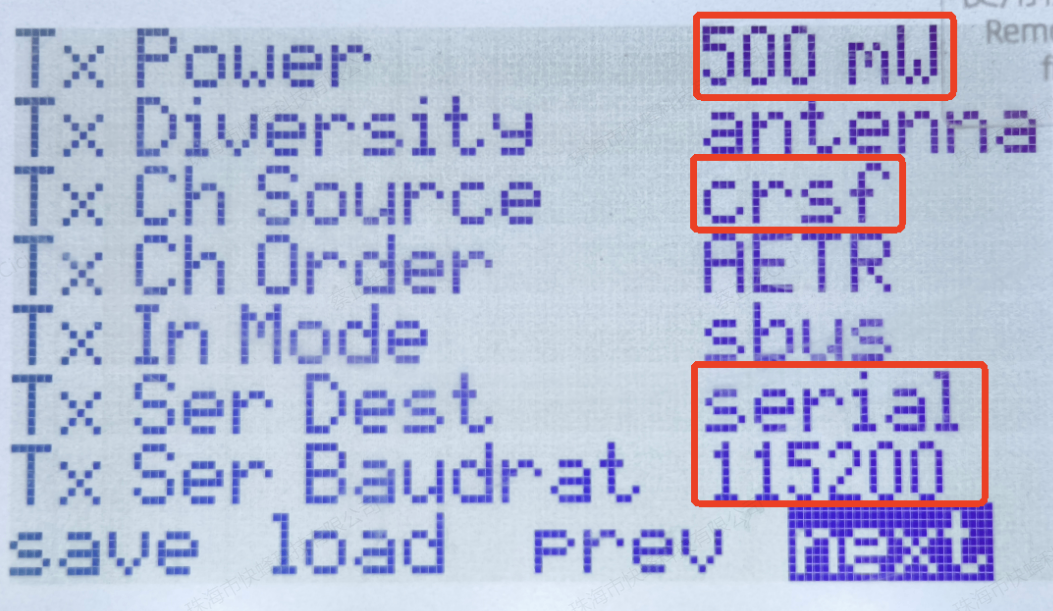
| 参数 | 设置为 |
| Tx Power | 500mW |
| Tx Ch Source | crsf |
| Tx Ser Dest | serial |
| Tx Ser Baudrate | 115200 |
接收机参数设置:
①进入Lua脚本,修改以下参数设置;
②彩色屏幕:点击Edit Tx,进入高频头参数编辑:
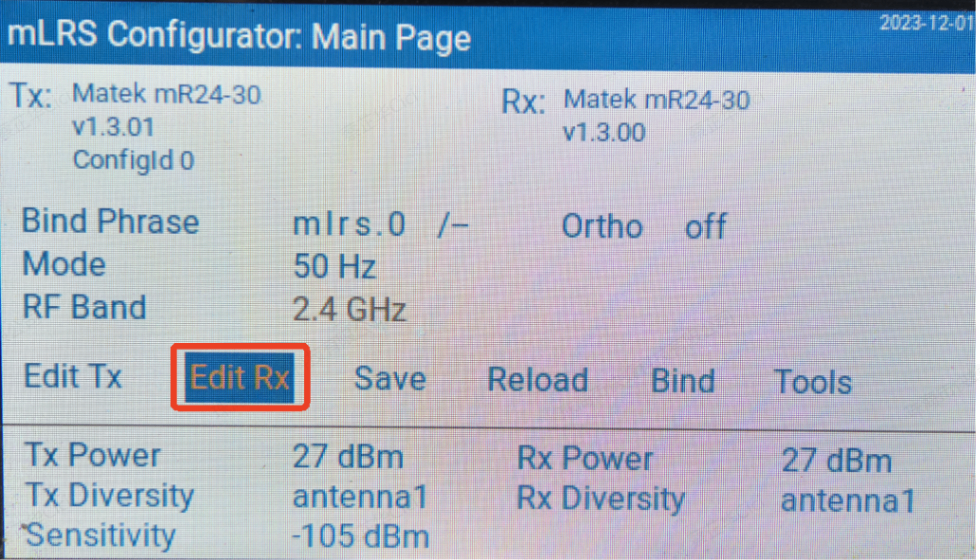
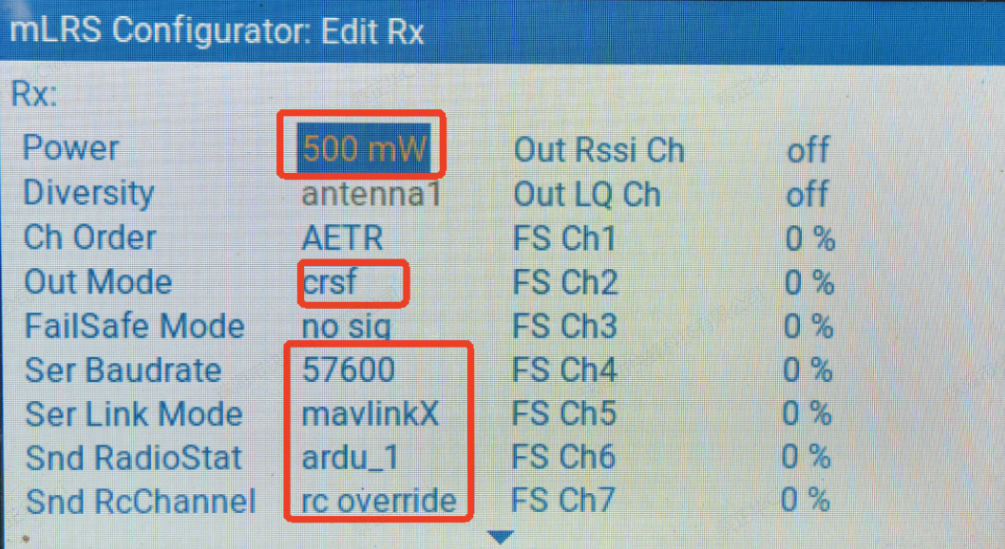
或者黑白屏幕:点击next,找到Rx的相关参数。
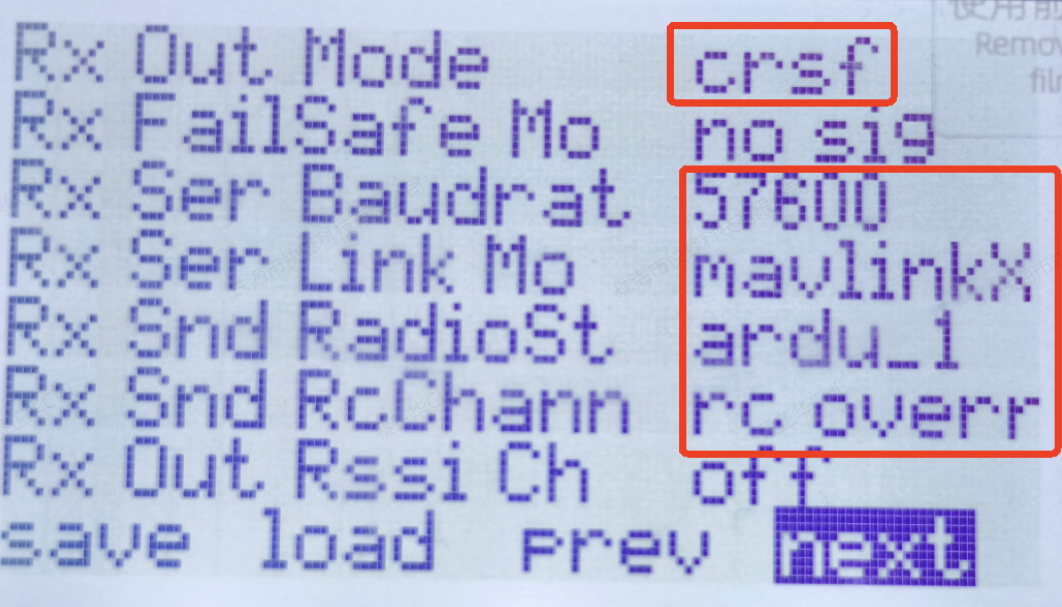
| 参数 | 设置为 |
| Rx Power | 500mW |
| Rx Out Mode | crsf |
| Rx Ser Baudrate | 57600 |
| Rx Ser Link Mode | mavlinkX |
| Rx Snd RadioStat | ardu_1 |
| Rx Snd RcChannel | rc_override |
四、飞控参数设置
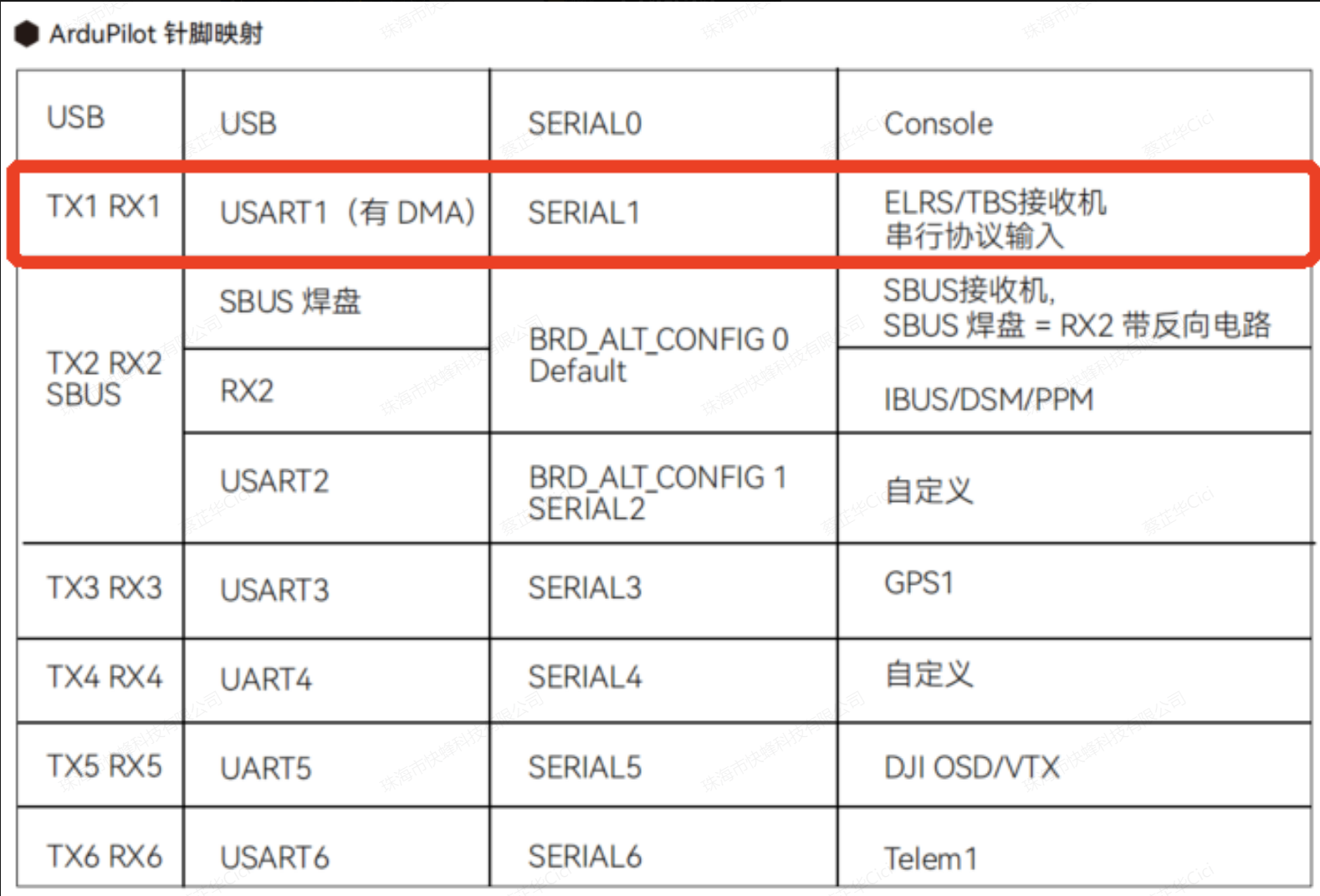
1)查询接收机所使用的飞控串口:
确认接收机的RX接到飞控的TX,接收机的TX接到飞控的RX:
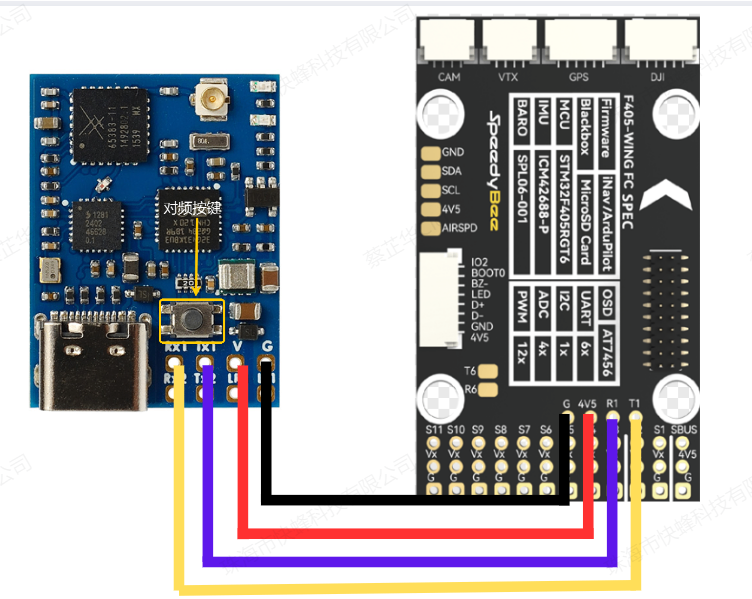
SpeedyBee F405 WING APP/SpeedyBee F405 WING MINI 所使用的串口为 SERIAL 1:
2)参数设置
- 使用 USB 数据线连接飞控,并打开 Mission Planner 软件连接上飞控。
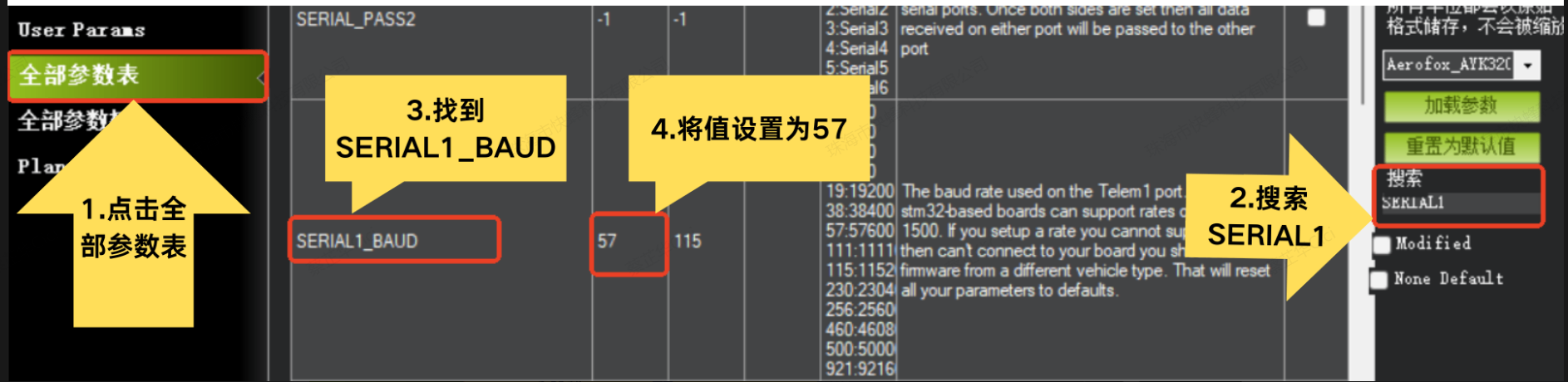
- 进入“全部参数表”页面。
- 将 SERIALX_BAUD 设置为 57600。
- 将 SERIALX_PROTOCOL 设置为 Mavlink2。
- 点击“保存参数”以确认设置。
- 设置完成后,断开飞控电源并重新启动飞控。

※以上所修改串口(SERIAL1)仅做演示,请在设置前确认好接收机所使用的飞控串口!
五、遥控上行信号通信确认
1)重新使用 USB 数据线,将飞控连接至电脑,并在 MissionPlanner 地面站中完成连接操作。
2)进入初始设置中,遥控器校准页面,检查飞控是否能够接收到遥控器的数据输入。

3)在遥控器校准界面有数据显示,表示遥控器与飞控的上行链路已成功建立通信。如果校准界面无数据,请返回 检查高频头与接收机的参数设置
六、数传链路双向通信确认
1)进入遥控器的 MDL 菜单 → TELEMETRY 界面 → 展开 Sensors,即可查看当前高频头接收到的数据。
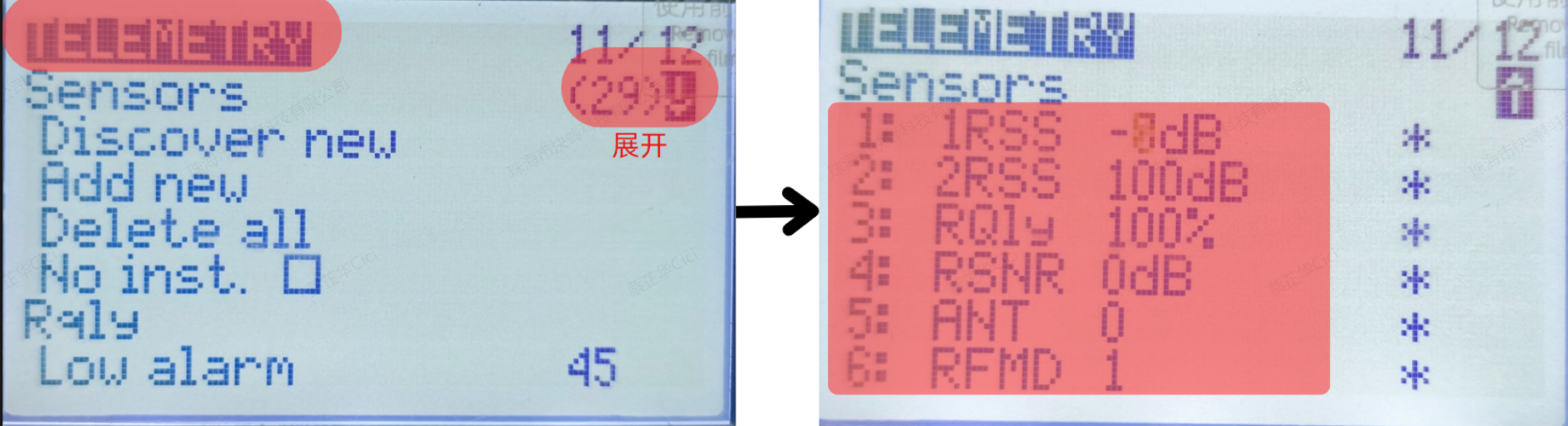
2)若仅有接收机的信号数据展示,则代表高频头与飞控未建立通信, 需检查飞控参数设置以及接收机与飞控的接线。
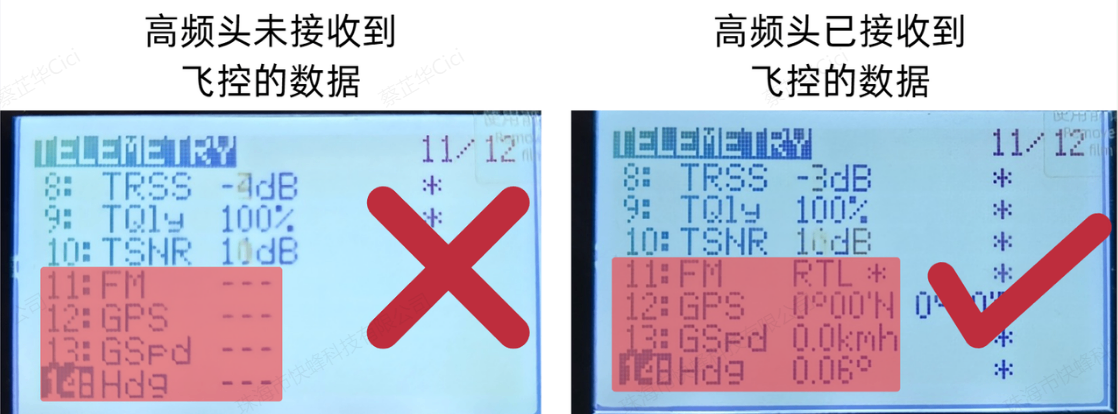
3)若接收到飞控回传的数据信息,则代表数传链路已成功建立通信,可正常使用遥测功能。
七、不同地面站的连接设置
7.1 MissionPlanner连接教程
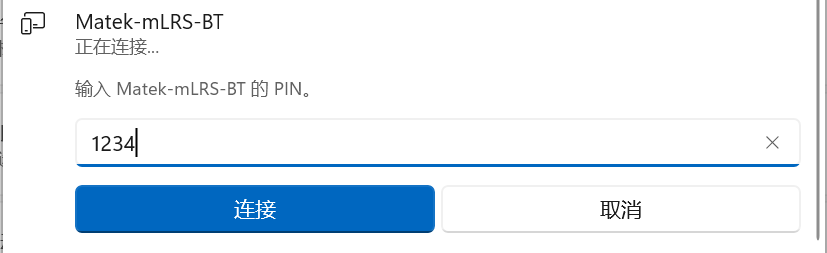
1)打开电脑的蓝牙,找到Matek-mLRS-BT,对其进行配对,默认蓝牙PIN为:1234;
2)打开MissionPlanner,选择COM X 蓝牙链接上的串行(COM X),选择连接波特率为115200,点击连接;
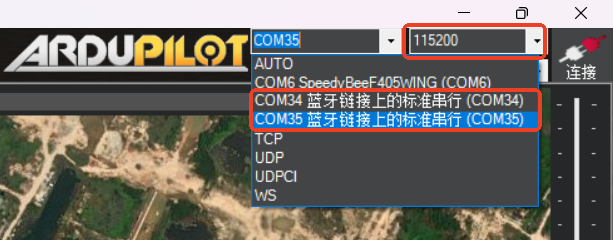
※注意:可能会出现两个蓝牙COM口,连接任意一个COM口,若无法成功连接则切换至另外一个。
3)地面站获取参数完毕,连接成功,打开链接统计可查看到链接数据。

7.2 QGroundControl连接教程
1)确认在 Mission Planner 地面站上可以正常使用 MLRS 的遥控和数传功能后,再连接其他地面站进行操作。
2)具体设置如下:
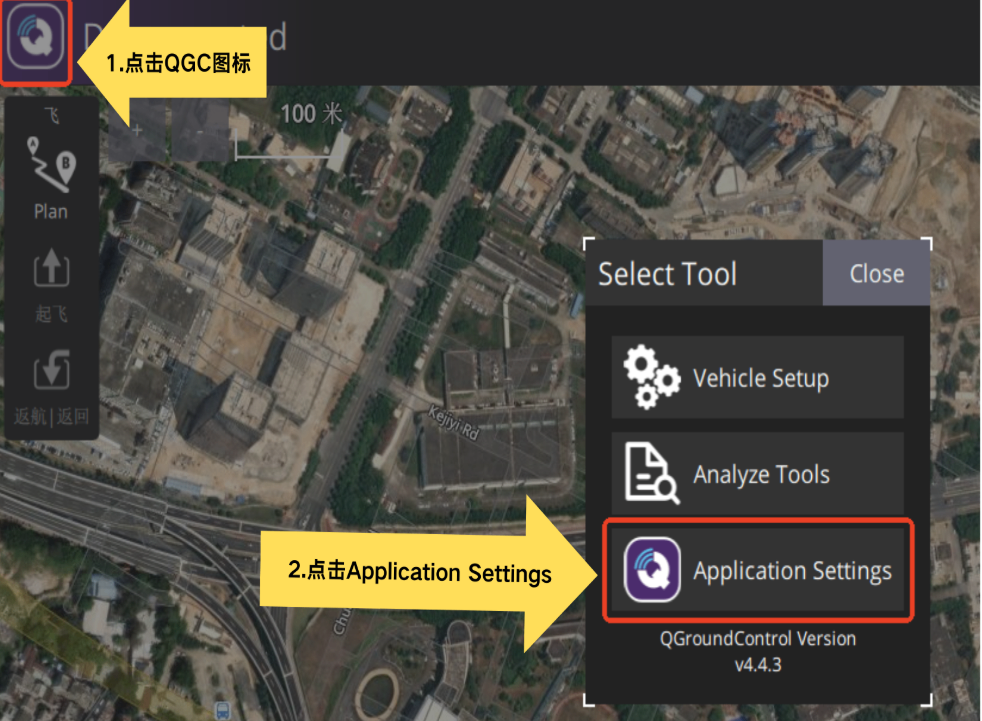
- 打开 QGC 地面站,点击左上角的 QGC 图标。
- 选择 Application Settings(应用程序设置)。
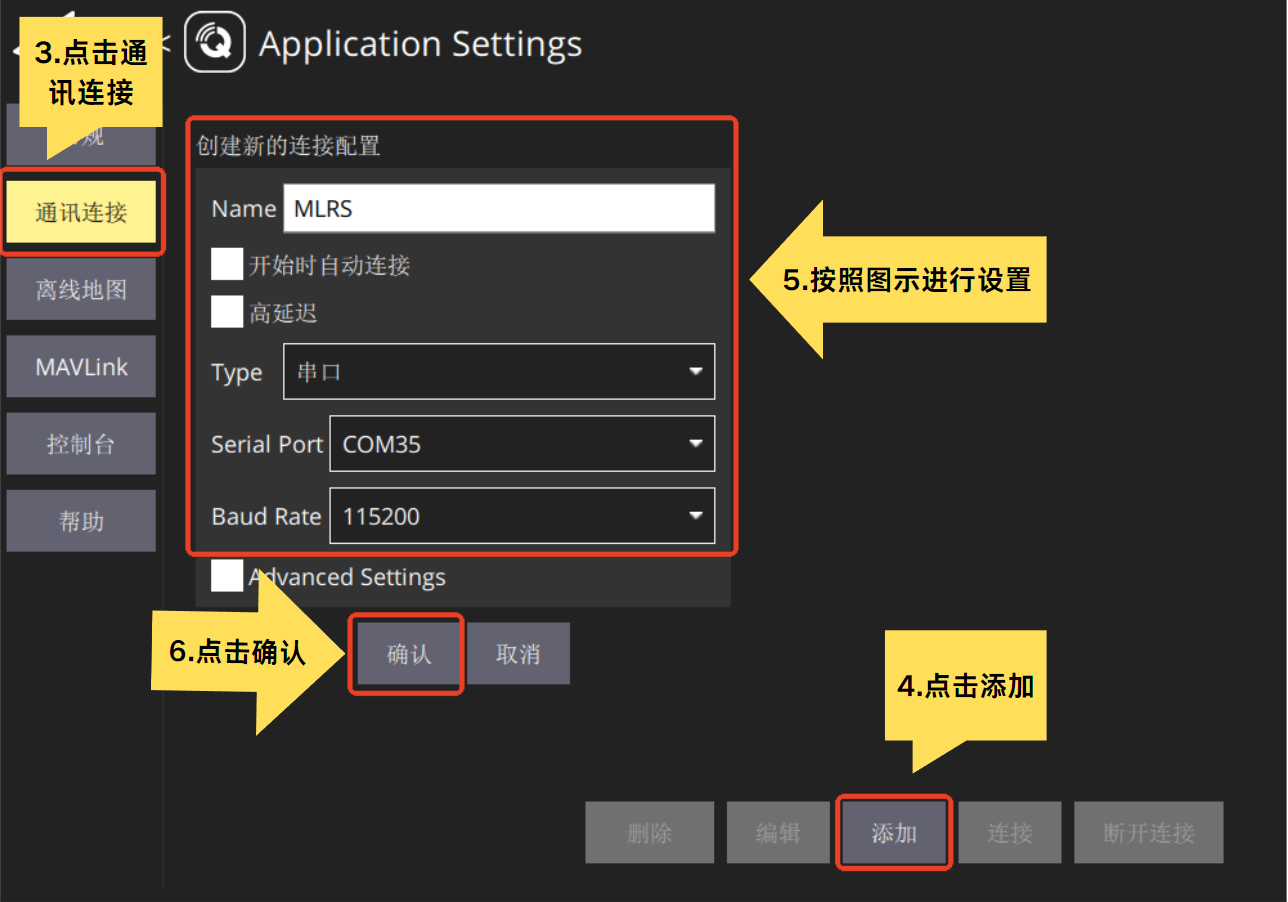
- 进入 通讯连接。
- 点击 添加。
- 设置 Name 为 MLRS,设置 Type 为 串口,将 Serial Port 设置为 COM X(蓝牙使用的串口),将 Baud Rate(波特率)设置为 115200。
- 点击 确认 保存设置。
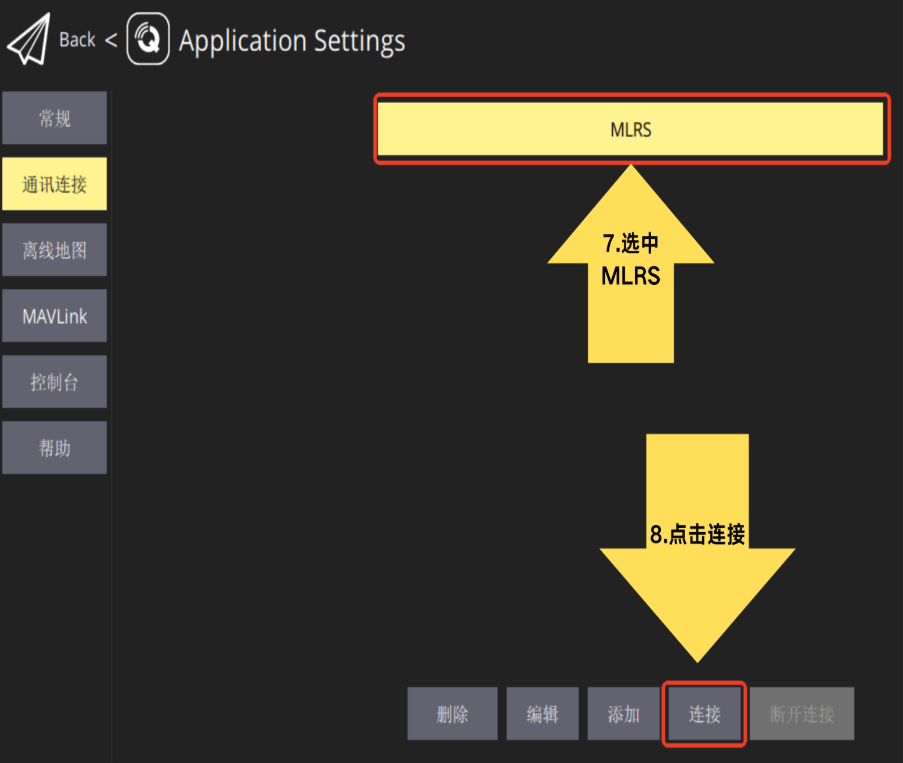
- 返回通讯连接界面,选择 MLRS
- 然后点击 连接。
3)当 QGC 左上角的状态从 Disconnected 变为 Not Ready 或 Ready to Fly 时,表示已经成功连接,等待参数读取完成即可。

| 使用不同设备进行Mavlink遥测通信的效果对比表 |
| | 500米处链接质量(%) | 500米处包速率(个/s) | 1000米处链接质量(%) | 1000米处包速率(个/s) |
| 数传 | 95~100% | 56~58 | 95~100% | 56~58 |
| MLRS 2.4G高频头-BLE | 90~100% | 55~60 | 90~100% | 55~60 |
| ELRS 2.4G高频头-USB | 90~100% | 25~35 | 90~100% | 25~35 |
| ELRS 2.4G高频头-WiFi | 90~100% | 25~35 | 90~100% | 25~35 |
八、Q&A
Q:若出现遥控器输出,飞机无舵面反馈,且地面站的遥控器输入界面为无数值变化的状态?
A:使用MissionPlanner地面站进行检查:
确认接收机连接线无损坏,高频头接口排针和座子无变形→确认高频头和接收机已对频→确认高频头与接收机的参数配置正确→进行修改完毕后,将高频头、接收机、飞控进行断电重启→再次连接。
Q:若出现遥控器输出飞机有反馈,但使用高频头的蓝牙模式无法连接至地面站?
A:使用MissionPlanner地面站进行检查:
确认接收机所使用的串口的波特率设置为57600,协议为Mavlink→进行修改完毕后,将高频头、接收机、飞控进行断电重启→确认使用蓝牙连接至地面站时所选择的连接波特率为115200。
Q:若出现蓝牙COM无法连接上,且参数都设置好的情况?
A:取消蓝牙配对,关闭地面站,重新配对后,打开地面站再次进行连接。
技术支持二维码
