ArduPilot Y3垂起调参指南
一、飞行原理介绍
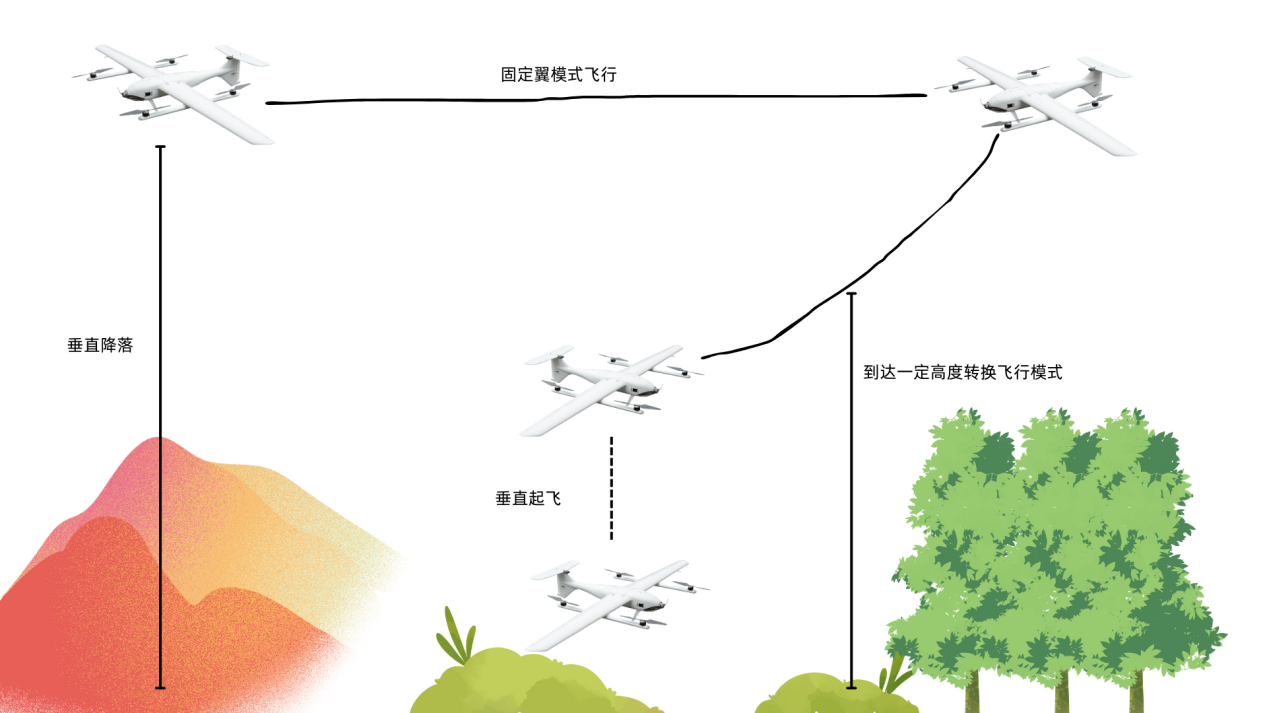
垂直起降固定翼无人机结合了多旋翼和固定翼技术,使用多旋翼进行垂直起降,通过转换机制切换到固定翼模式实现高效水平飞行。在水平飞行中,依靠机翼产生升力,并通过舵面调整方向和姿态。
二、设备准备
必要设备:
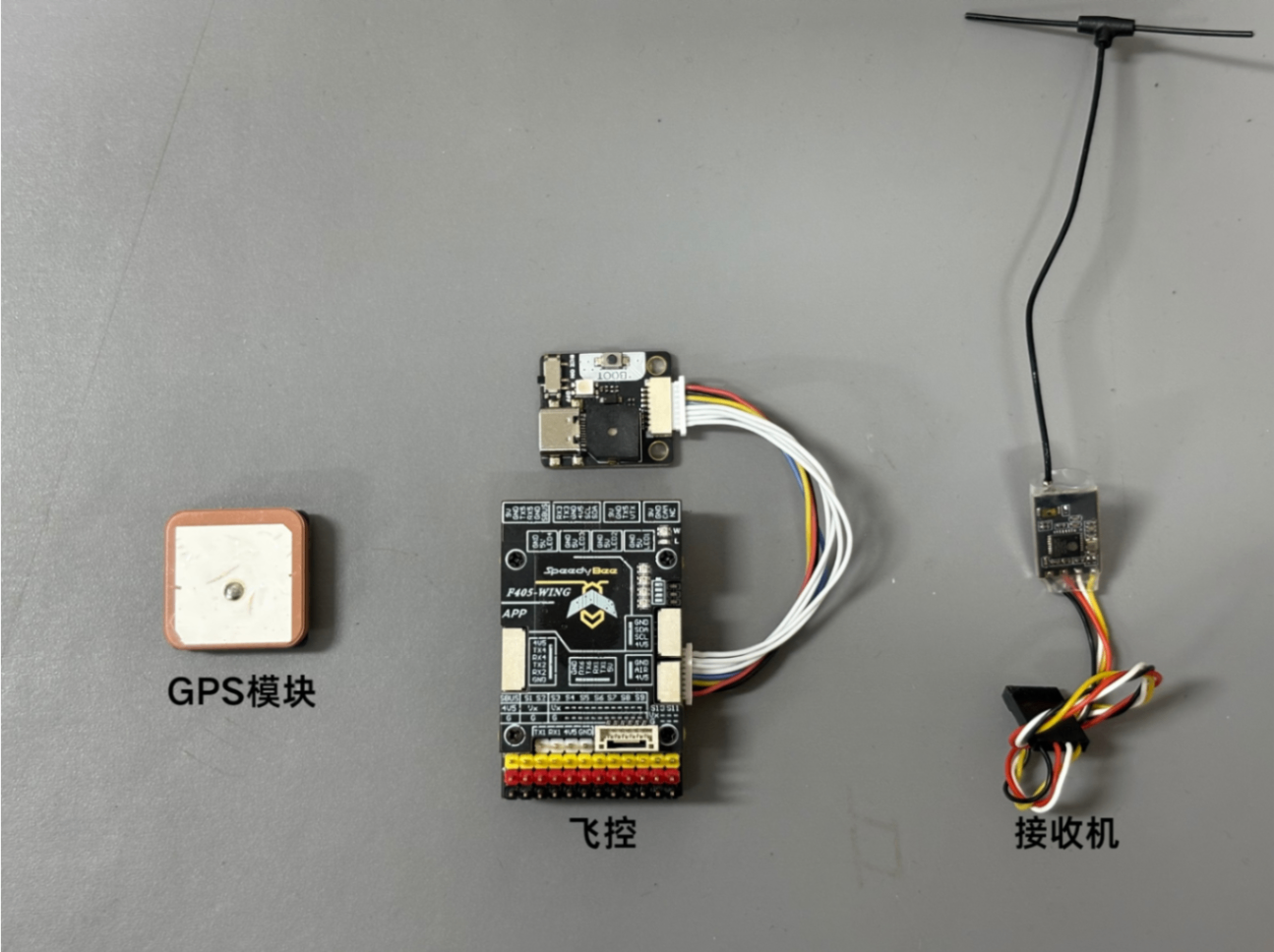
1)飞控: SpeedyBee F405 WING APP/ SpeedyBee F405 WING MINI/ SpeedyBee F405 WING APP V2 任意一款飞控均适用该教程。
2)遥控器: 以 RadioMaster Boxer /RadioMaster TX16S 遥控器为例子。
3)接收机: 以 SpeedyBee ELRS Nano 2.4G RX 接收机为例子。
4)GPS模块: 以 北征BZ-251GPS模块 为例 。
5)电机: 使用2306 KV1250电机,适用 中航电ALTUS垂起,仅供参考。
6)电调: 使用45A电调,适用 中航电ALTUS垂起,仅供参考。
7)舵机: 使用9g 金属数字舵机,适用 中航电ALTUS垂起,仅供参考。
8)电池: 使用4S1P 4000mah 21700电池,适用 中航电ALTUS垂起,仅供参考。
9)桨叶: 使用7寸三叶桨,适用 中航电ALTUS垂起,仅供参考。
选装设备:
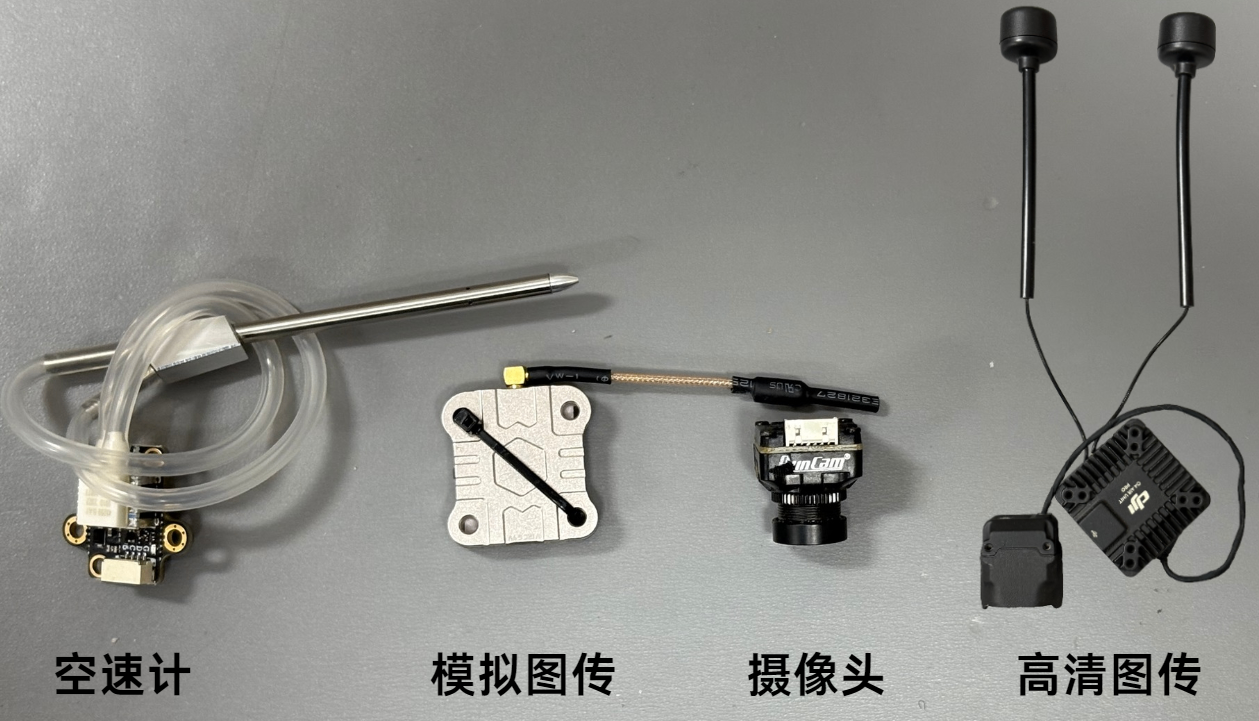
1)模拟图传: 以 SpeedyBee TX 1600图传和RunCam Phoenix2 SE V2摄像头 为例子。
2)高清图传: 以 DJI O4 AIR UNIT图传 为例子。
3)空速计: 建议使用数字空速计。
地面站安装可参考: https://docs.speedybee.cn/plane/software/apsoftware/mp-version-install.html
Mission Planner常用功能及页面介绍: https://docs.speedybee.cn/plane/software/apsoftware/common-functions.html
如何更新飞控的固件-使用MissionPlanner地面站: https://docs.speedybee.cn/plane/beforetuning/mp-fw-update.html
如何更新飞控的固件-使用INAV地面站: https://docs.speedybee.cn/plane/beforetuning/inav-fw-update.html
三、初始设置
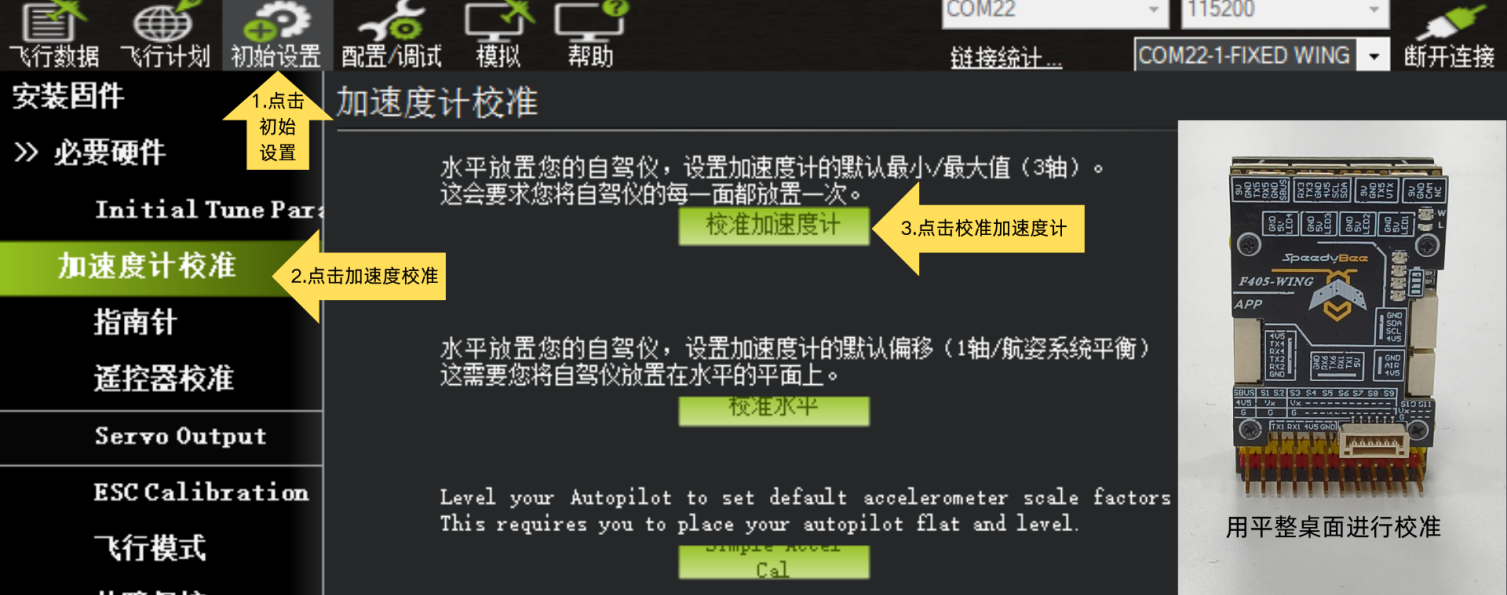
3.1 加速度计校准
注意:进行加速度计校准时务必将飞控从机舱内取出,到平整桌面进行校准,以提高校准准确性,保证飞行稳定!
- 使用USB数据线将飞控连接至地面站。
- 点击初始设置。
- 点击加速度计校准。
- 点击校准加速度计。
操作完毕后断开地面站连接和飞控所有供电,重新连接地面站。
在使用过程中温度和气候变化比较大、陀螺仪在遭受了严重的撞击、更换了传感器等,需要对加速度计进行重新校准!
加速度计校准详细操作: https://docs.speedybee.cn/plane/ardupilot/settings/fc/accel-calibration.html
3.2 垂起参数预调参
开启垂起参数:
- 进入 配置/调试 页面。
- 进入 全部参数表。
- 搜索 Q_ENABLE。
- 将 Q_ENABLE的 值设置为 1。

写入参数后重启飞控!!!
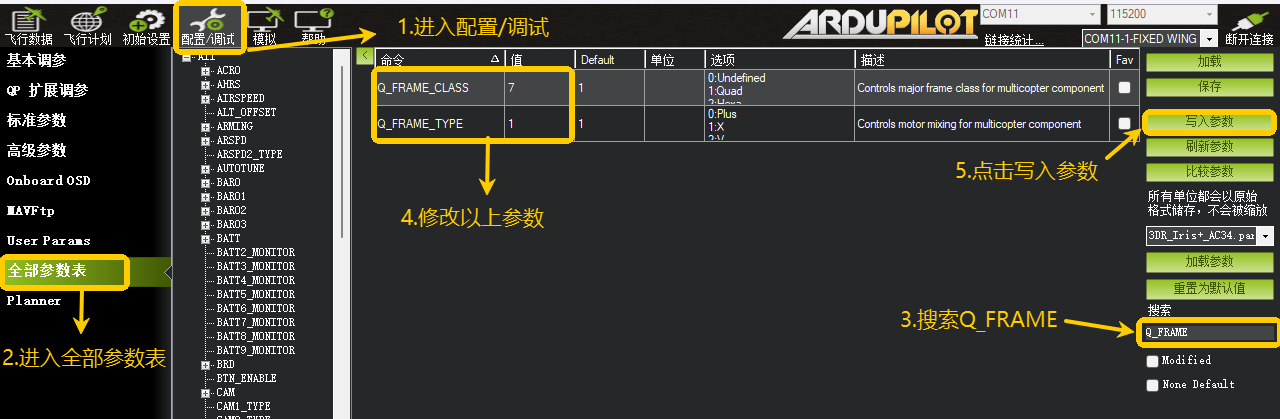
修改飞机类型:
- 进入 配置/调试 页面。
- 进入 全部参数表。
- 搜索 Q_FRAME。
- 将 Q_FRAME_CLASS 的值设置为 7, Q_FRAME_TYPE 的值设置为 1。
| 参数 | 值 | 说明 |
|---|---|---|
| Q_FRAME_CLASS | 7 | 三旋翼(Tri),适用于具有三个 VTOL 电机的飞行器。 |
| Q_FRAME_TYPE | 1 | "X" 型布局 |
开启倾转参数
- 进入 配置/调试 页面。
- 进入 全部参数表。
- 搜索 Q_TILT_ENABLE。
- 将 Q_TILT_ENABLE的 值设置为1。

写入参数后重启飞控!!!
配置倾转参数
- 进入 配置/调试 页面。
- 进入 全部参数表。
- 搜索 Q_TILT。
- 将 Q_TILT_TYPE的 值设置为 2, Q_TILT_MASK的 值设置为 3。
| 参数 | 值 | 说明 |
|---|---|---|
| Q_TILT_TYPE | 2 | 0:关闭 1:单倾转 2:矢量控制倾转 更改为2 |
| Q_TILT_MASK | 3 | 倾转的电机,是特殊进制的代码 更改=3 |

3.3 遥控器设置及飞行模式设置
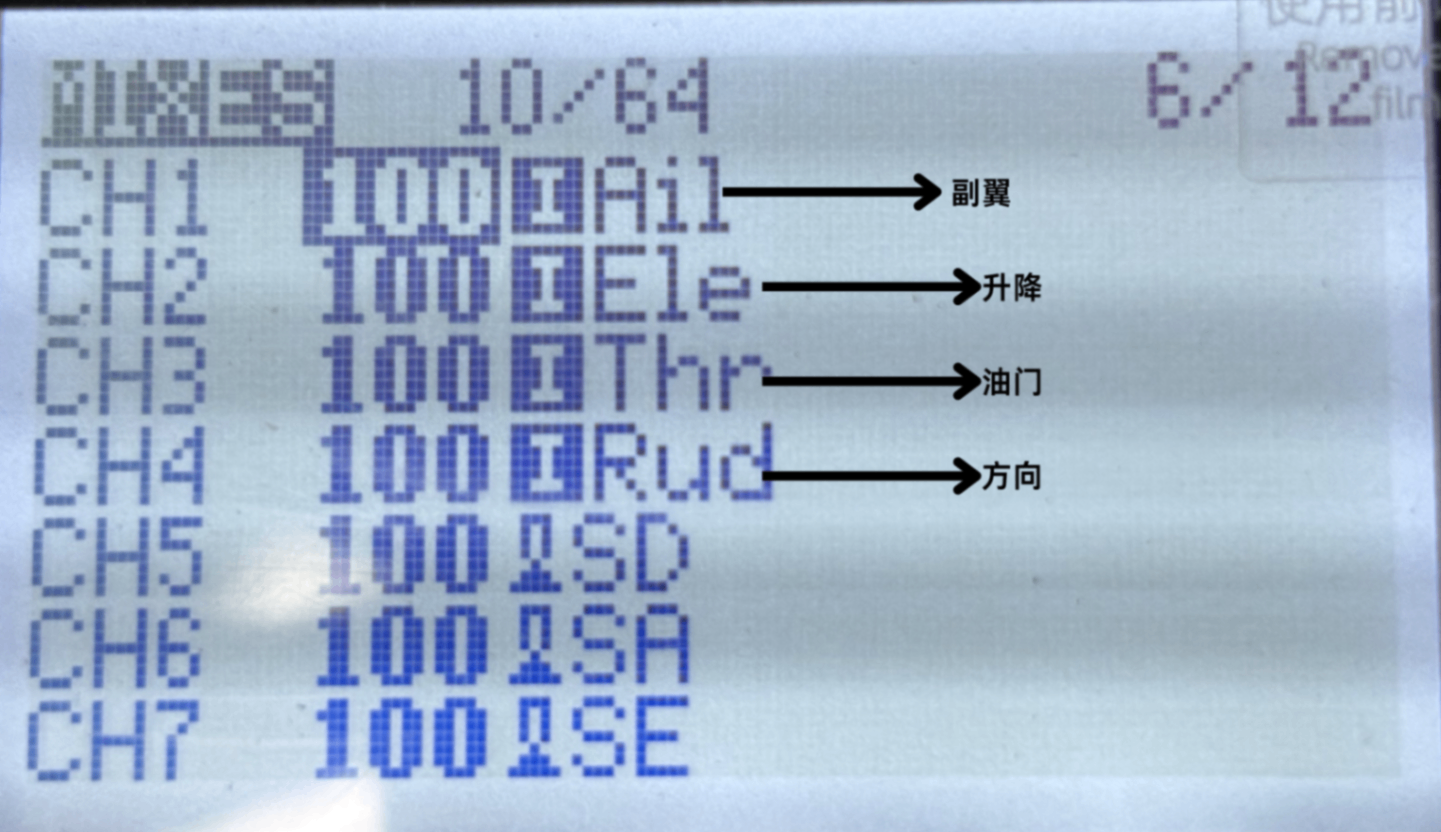
导航至 MDL/MIXES 页面,检查遥控器 CH1-CH4 是否为以下设置,如不一致,请修改遥控器混控。
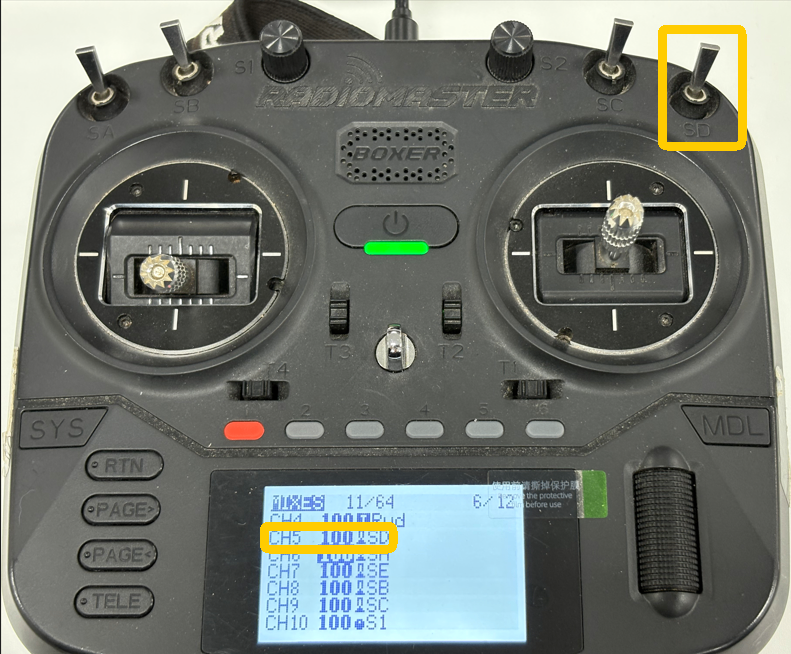
3.3.1 解锁通道设置
1.遥控器设置
- 选择一个 两段位开关
- 导航至 MDL/MIXES 页面,将其混控配置为 CH5
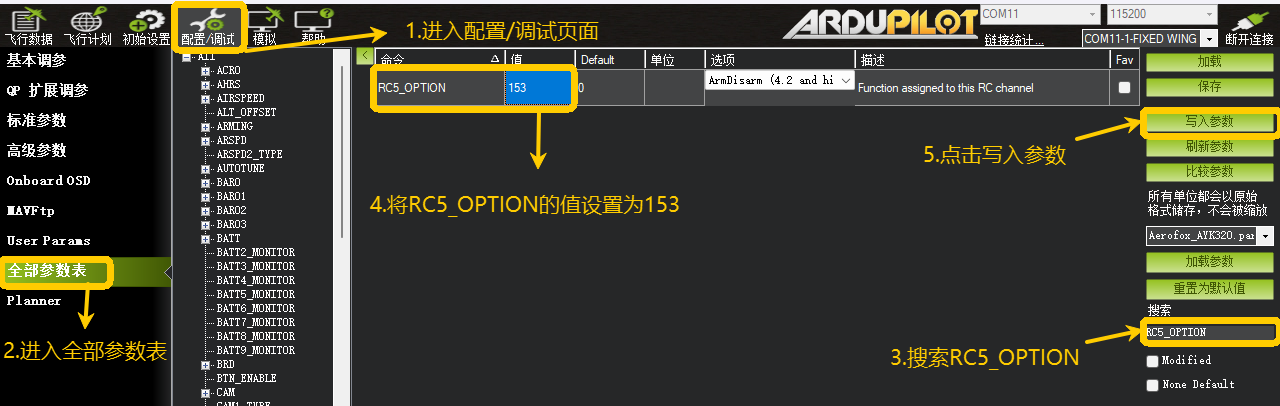
2.地面站设置
- 进入 配置/调试
- 进入 全部参数表
- 搜索 RC5_OPTION
- 将 RC5_OPTION 的值设置为 153
- 点击 写入参数
如何设置解锁与上锁: https://docs.speedybee.cn/plane/ardupilot/settings/fc/arming-disarm-setup.html
3.3.2 返航通道设置
1.遥控器设置
- 选择一个 两段位开关
- 导航至 MDL/MIXES 页面,将其混控配置为 CH6(仅供参考)

2.启用返航拨杆设置
- 进入 配置/调试
- 进入 全部参数表
- 搜索 RC6_OPTION
- 将 RC6_OPTION 的值设置为 4
- 点击 写入参数

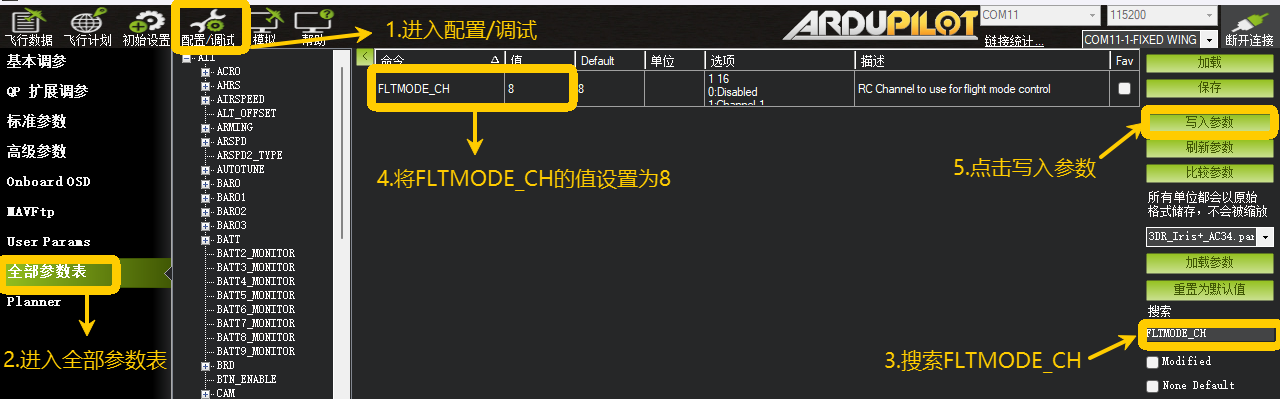
3.3.3 飞行模式设置
1.遥控器设置
- 选择一个 三段位开关,设置三段飞行模式开关
- 导航至 MDL/MIXES 页面,将其混控配置为 CH8

2.地面站设置
飞行模式通道设置:
- 进入 配置/调试
- 进入 全部参数表
- 搜索 FLTMODE_CH
- 将 FLTMODE_CH 的值设置为 8
- 点击 写入参数
如何设置六段飞行模式开关: https://docs.speedybee.cn/plane/ardupilot/settings/rc/sixpos-switch.html
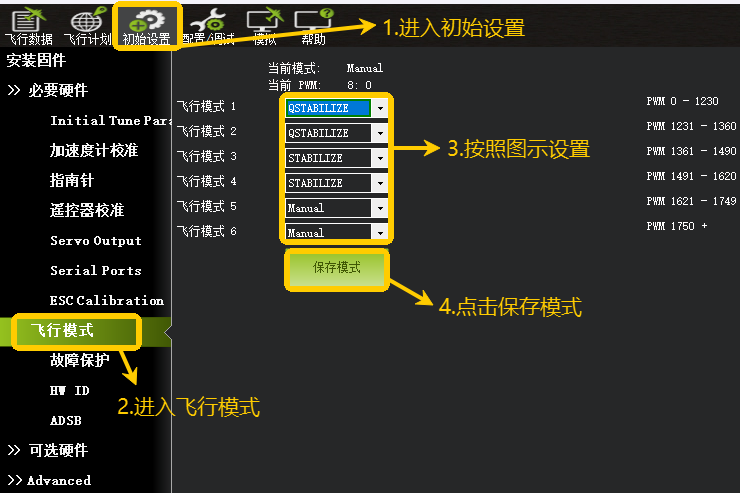
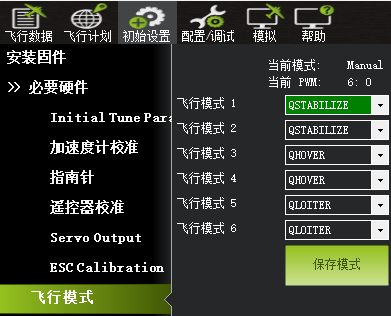
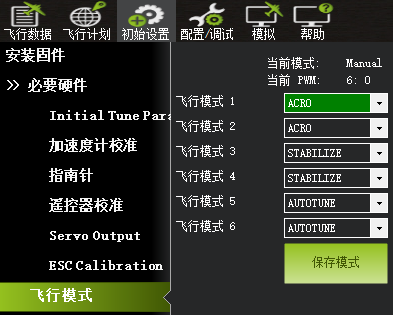
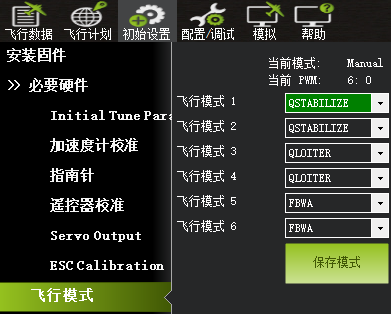
飞行模式设置:
- 进入初始设置
- 进入飞行模式
- 按照图示设置飞行模式
- 点击保存模式
飞行模式介绍: https://docs.speedybee.cn/plane/ardupilot/settings/fc/flight-modes.html
3.3.4 遥控器校准
1.请将遥控器与接收机进行对频
ELRS接收机如何与遥控器对频: https://docs.speedybee.cn/plane/ardupilot/settings/rc/elrs-bind.html
- 进入初始设置。
- 进入遥控器校准。
- 点击校准遥控。
- 注意勾选俯仰(PITCH)反转。

遥控器校准详细操作流程: https://docs.speedybee.cn/plane/ardupilot/settings/fc/calibration.html
四、设备装机
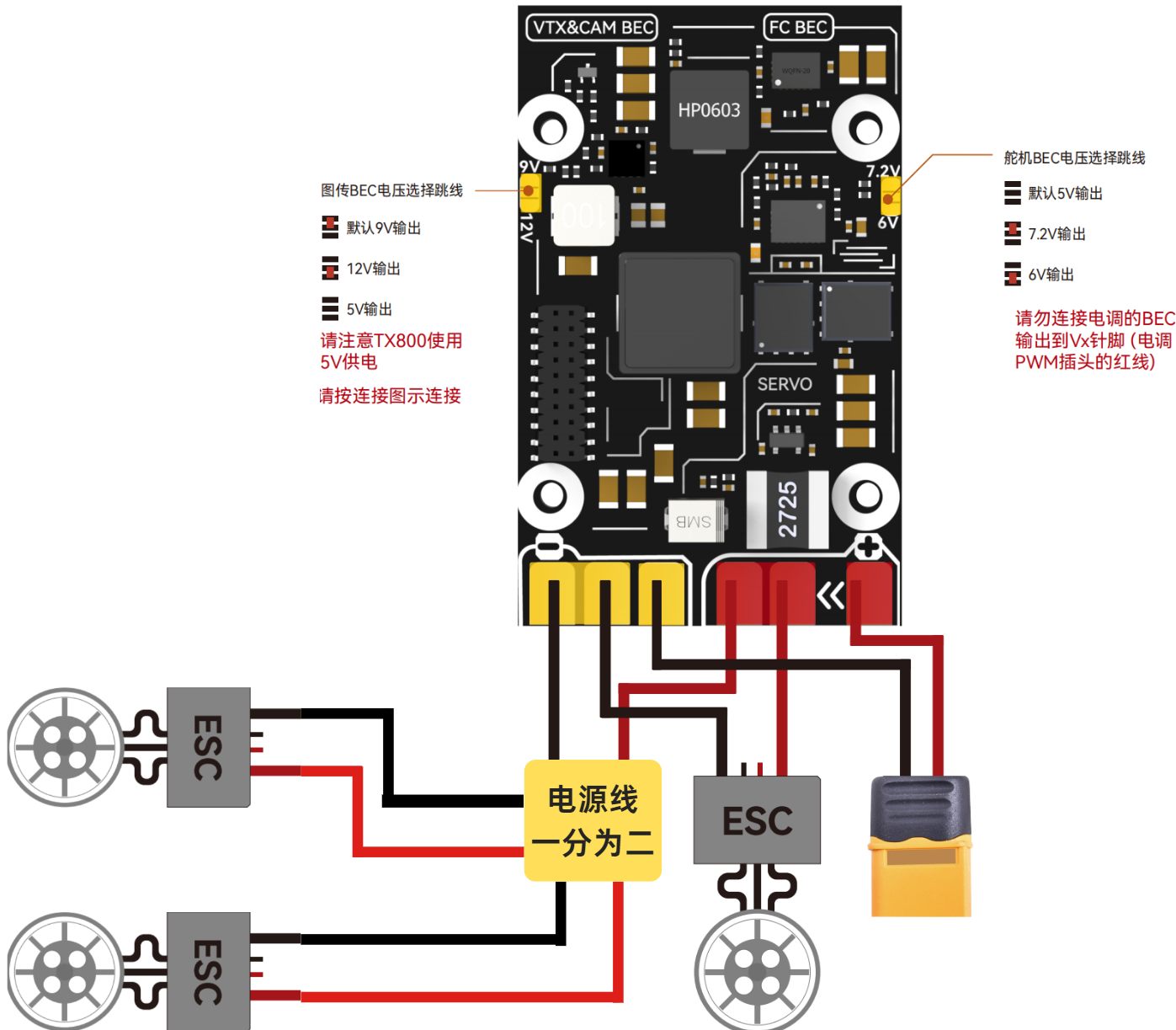
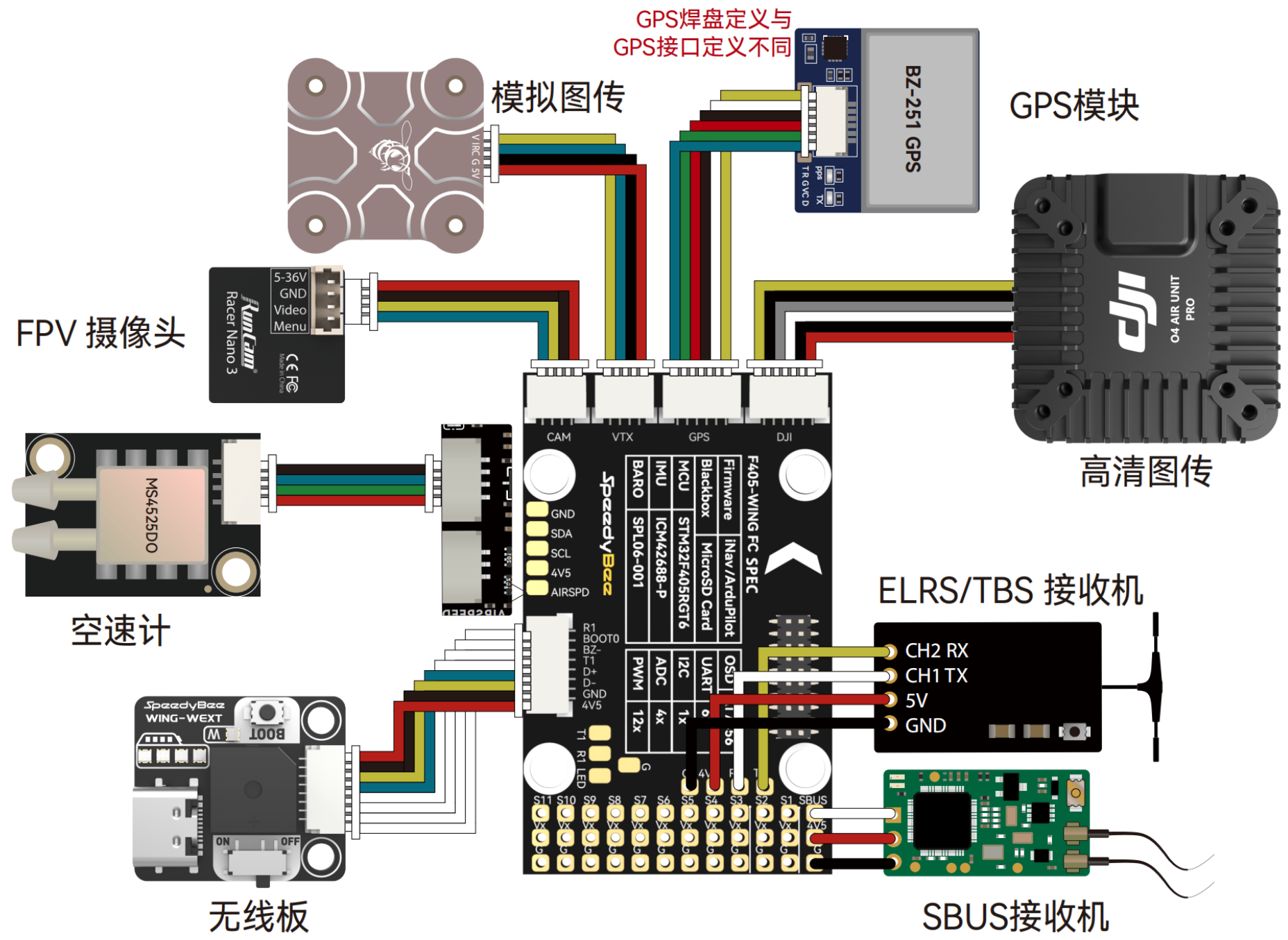
4.1 飞控接线
- 电源接线
注意:
1.电源正极必须接入指定焊盘。
2.ESC指电调。
3.焊接时注意不要虚焊。
4.2 飞控安装
飞控应安装于飞机的重心位置以及三个电机的中心位置,可参考下图:
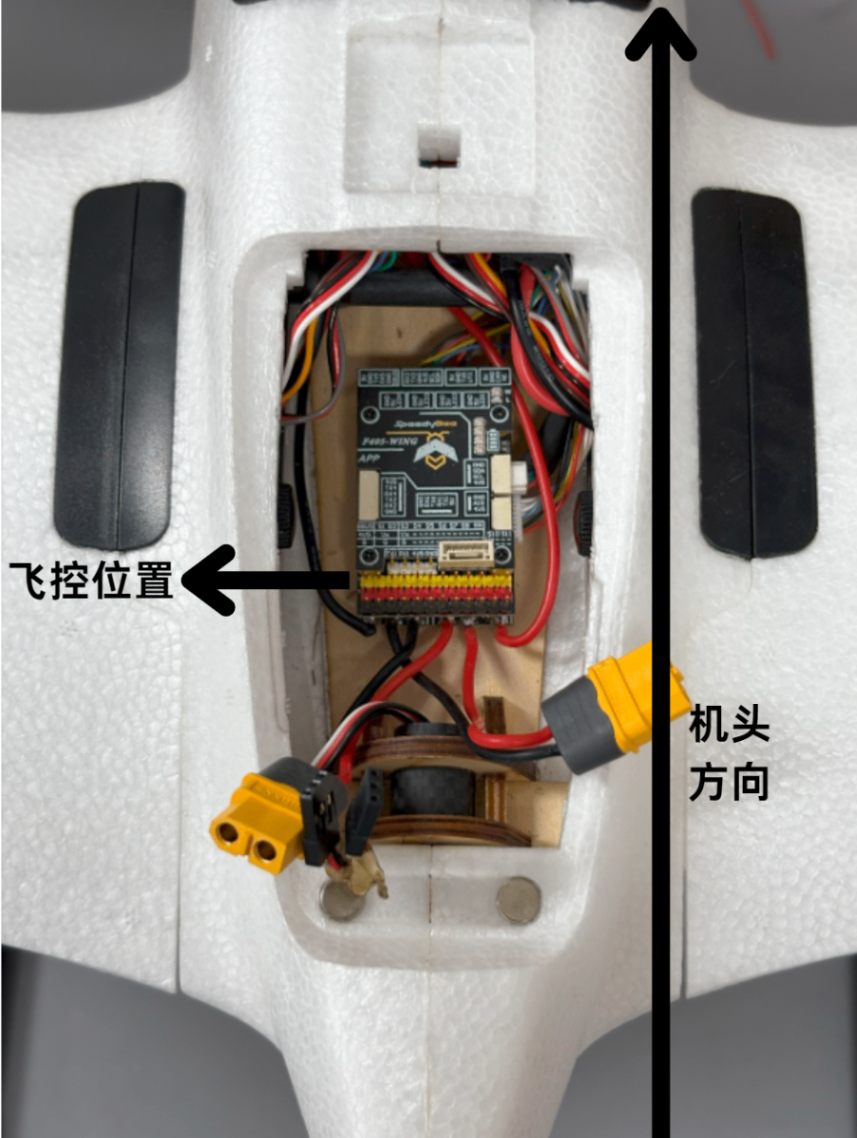
若需要调整飞控的安装朝向: https://docs.speedybee.cn/plane/ardupilot/settings/fc/orientation-setup.html
4.3 外设安装与设置
- 外设接线
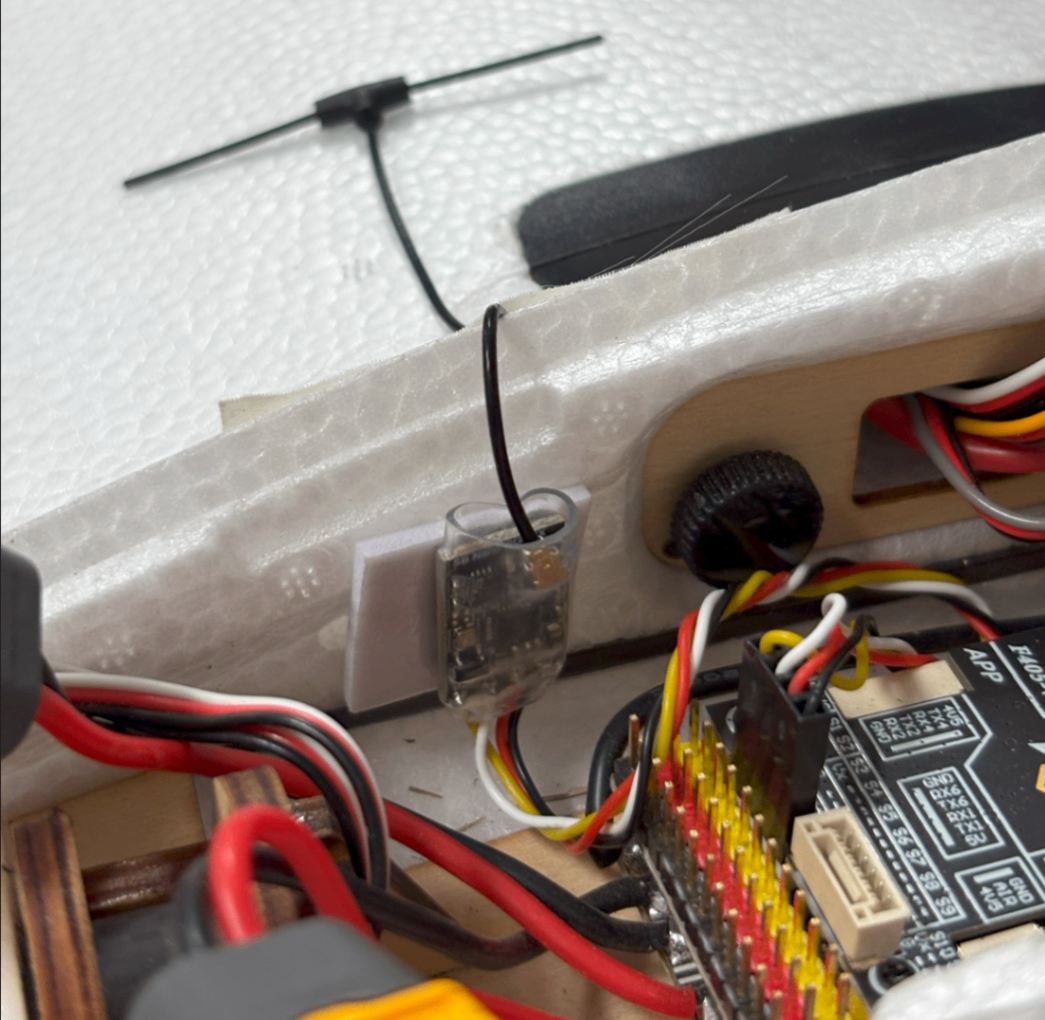
4.3.1 接收机安装与设置
装机位置如图所示, 将天线沿出舱外,使用胶布固定天线:
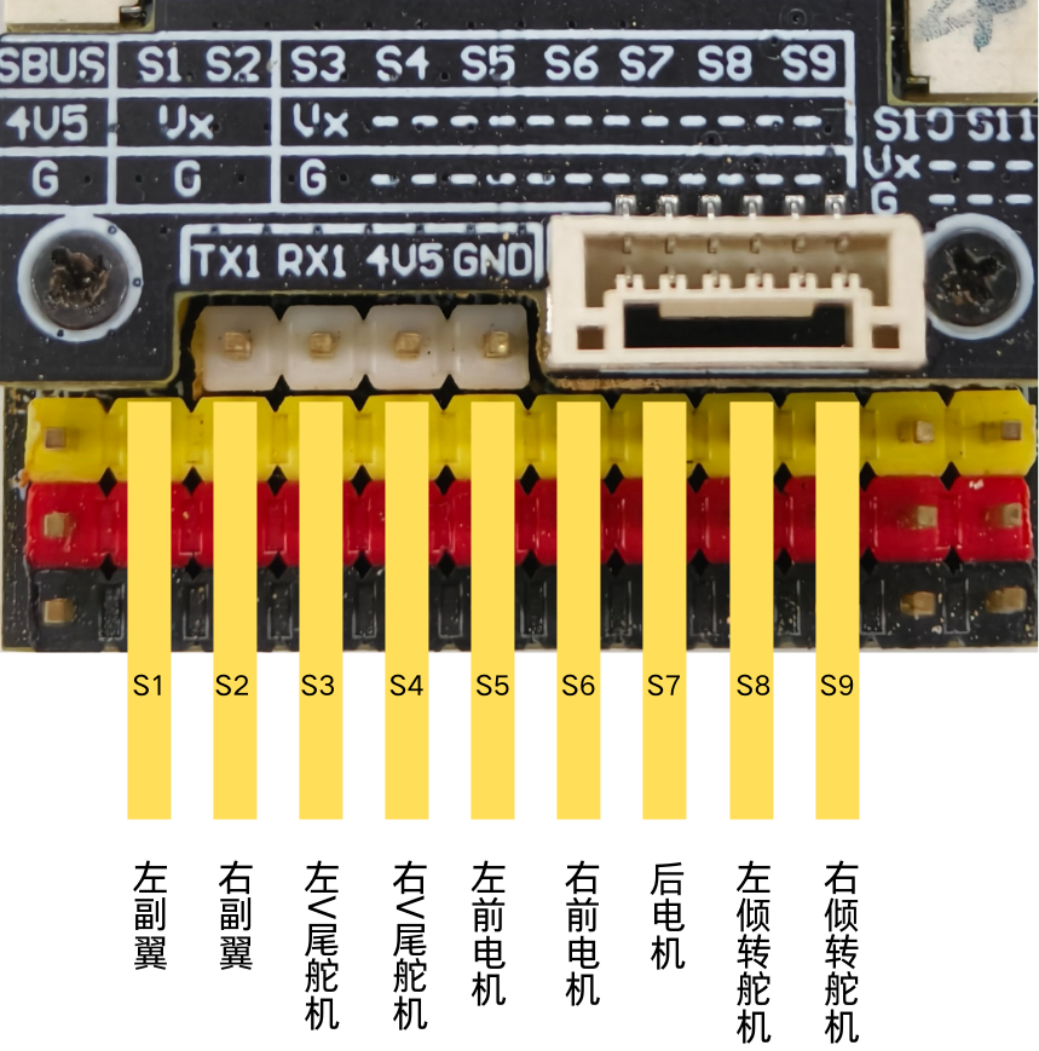
4.3.2 Servo Output 设置(舵机与电机设置)及舵面检查
飞控自带BEC,如电调也自带BEC需把中间电源线挑出来并做好绝缘,防止飞行途中晃动导致接触到导体,导致短路
输出接线:
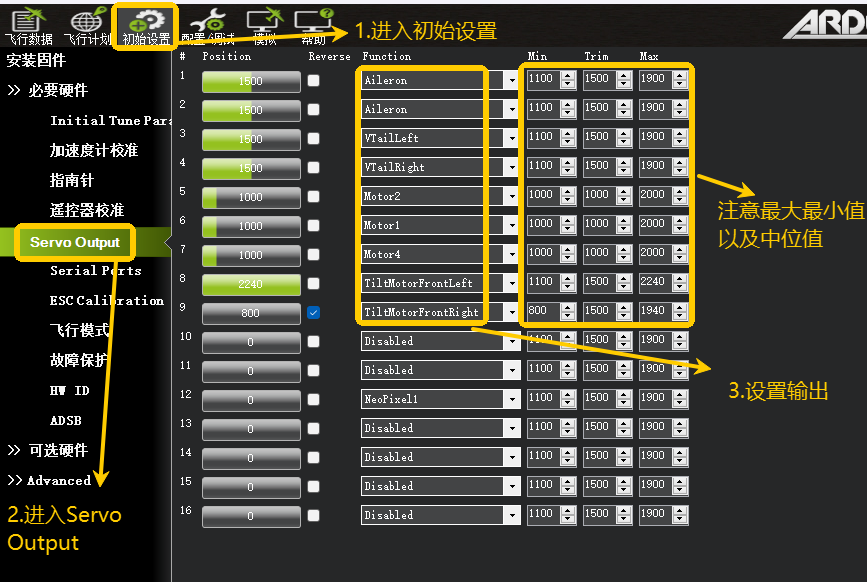
参数设置:
AP固件参考的是 多轴Y-3 的电机定义,需注意 左前电机 为MOTOR 2, 右前电机 为MOTOR 1, 后电机 为MOTOR 4 。

- 进入初始设置
- 进入Servo Output
- 设置输出
| 通道 | 输出 | 说明 |
|---|---|---|
| S1 | Aileron | 左副翼 |
| S2 | Aileron | 右副翼 |
| S3 | VTailLeft | 左V尾舵机 |
| S4 | VTailRight | 右V尾舵机 |
| S5 | Motor2 | 左前电机 |
| S6 | Motor1 | 右前电机 |
| S7 | Motor4 | 后电机 |
| S8 | TiltMotorFrontLeft | 左倾转舵机 |
| S9 | TiltMotorFrontRight | 右倾转舵机 |
注意:
1.油门的 最小值和中位值 一致,AP地面有时更改输出 并不会自动更改油门中位值,请注意检查。
2.输出设置尽可能按照定时器分组进行设置。可查看飞控说明书 “ **Part5-针脚映射-**ArduPilot 针脚映射 ” 部分。
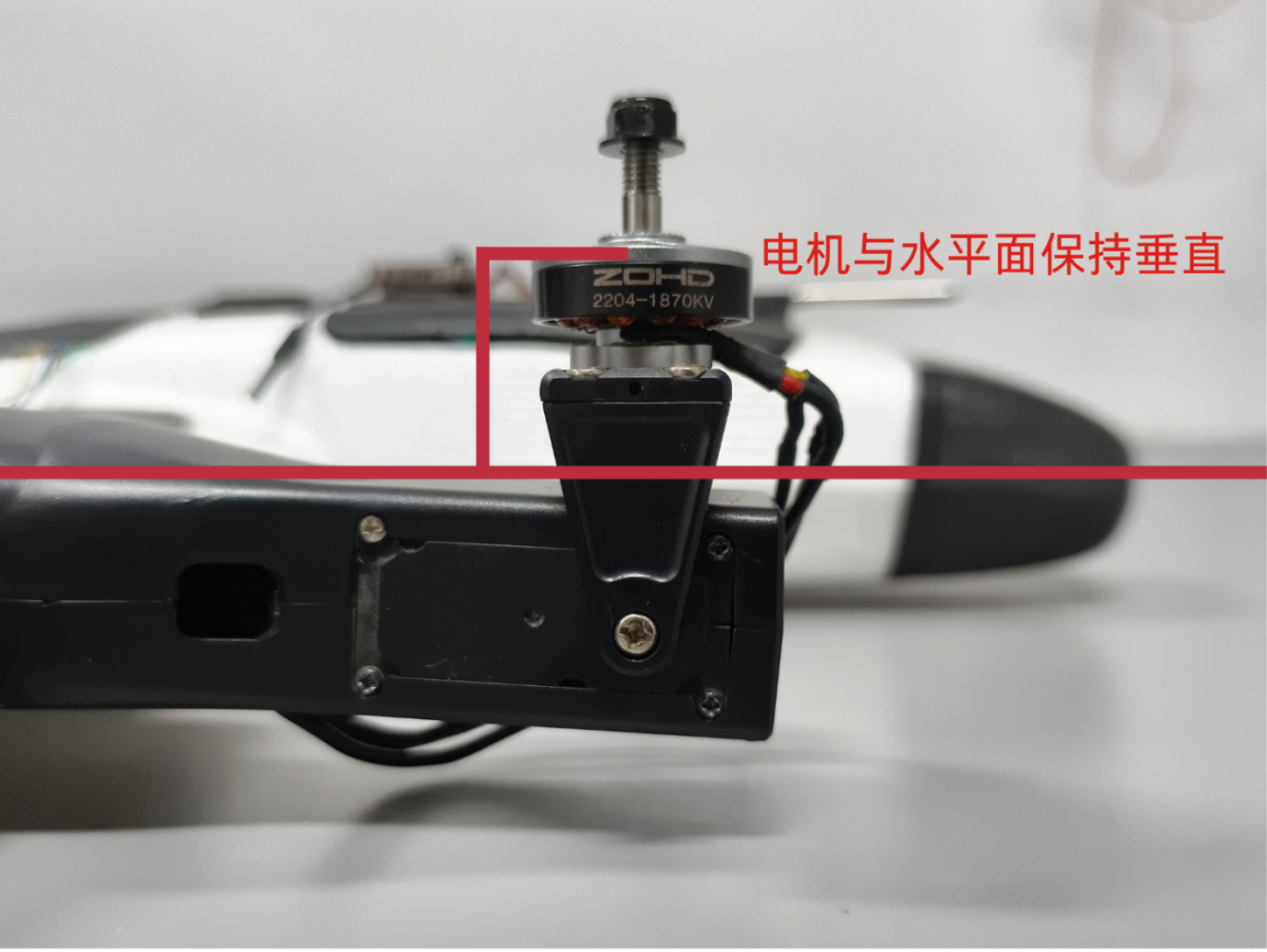
倾转舵机检查:
将飞行模式切换至 QSTABILIZE,接上电池供电;
倾转舵机在垂起状态下是 90度垂直,如图所示:
当出现一个舵机垂直,另一个舵机水平时,只需将错误的倾转舵机对应的通道勾选 Reverse(反向)即可。
1.根据实际情况去调整,不一定每一台飞机在多轴模式下左倾转舵机PWM值都是处于低位。
2.通过调整不同模式下的PWM信号的最大和最小占空比值来精确控制舵机的位置或角度。
3.当我们调整min、max值时,地面站可能会弹出超出限制的提示,点击确认即可。
若不是,请调整 8通道 的 min 值和 9通道 的 max 值,如图所示:

将飞行模式切换至Manual ;
倾转舵机在固定翼状态下是 180 度水平,如下图所示:

若不是,请调整 8通道 的 max 值和 9通道 的 min 值,如图所示:

舵面检查:
a.自稳模式下,舵面反馈检查
飞行模式切换至 FBWA
- 当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
- 当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
- 当飞机抬头时,反馈为两个舵面同时朝下。
- 当飞机低头时,反馈为两个舵面同时朝上。
b.手动模式下,舵面反馈检查
飞行模式切换至 ACRO
- 当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
- 当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
- 当向上打升降杆时,反馈为两个舵面同时朝下。
- 当向下打升降杆时,反馈为两个舵面同时朝上。
- 当向左打方向杆时,反馈为两个舵面同时朝左。
- 当向右打方向杆时,反馈为两个舵面同时朝右。
先检查自稳反馈是否正确,再检查手动反馈是否正确,若自稳反馈不正确,将错误的舵面通道勾选反向即可。

自稳状态下,若遥控操作的方向舵正确,则自稳的方向舵反馈一定正确。若自稳反馈不正确请检查遥控操作的方向舵反馈 。
如何确认舵面反馈是否正确详细内容可参考: https://docs.speedybee.cn/plane/ardupilot/settings/fc/dir-check.html
4.3.3 GPS模块安装
装机位置如图所示,模块底部使用3M胶固定, 确保模块安装牢固,否则会很影响飞行效果:
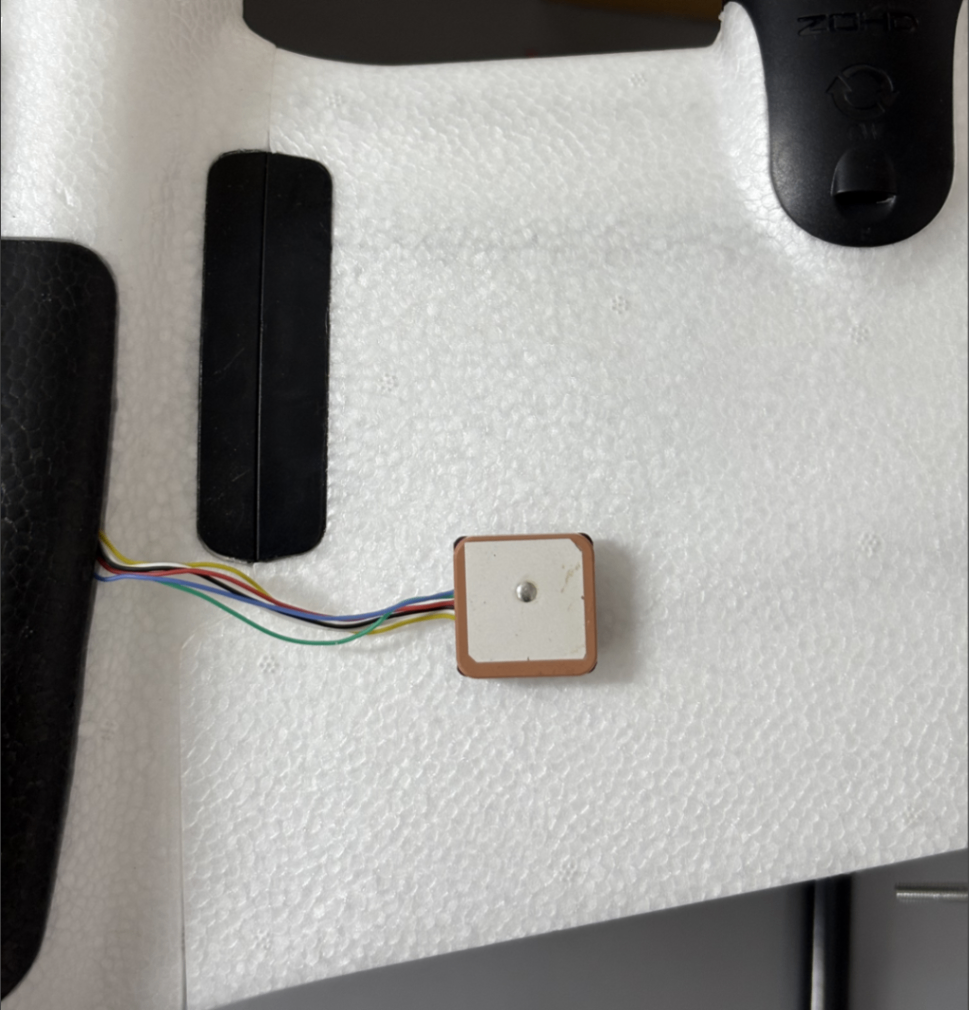
1.远离金属安装,例如:磁铁舱盖、金属拉杆等,否则会干扰罗盘。
2.远离接收机、舵机线、电机等设备安装,否则会干扰罗盘。
3.注意确认安装是否牢固。
4.不同模块的详细安装操作请参考其说明书。
4.3.4 图传设备安装与设置
- 模拟图传安装:

- 模拟图传参数设置:
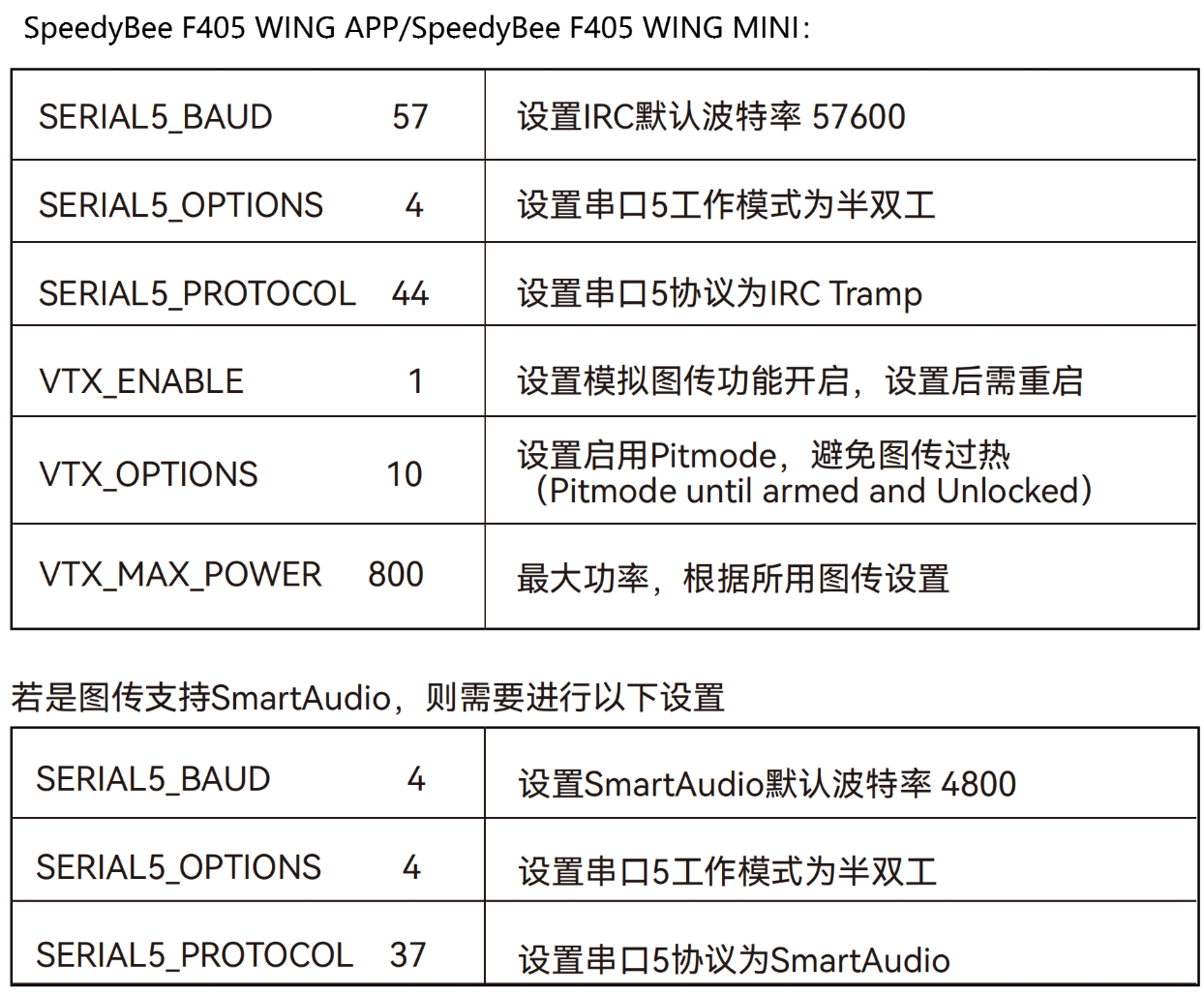
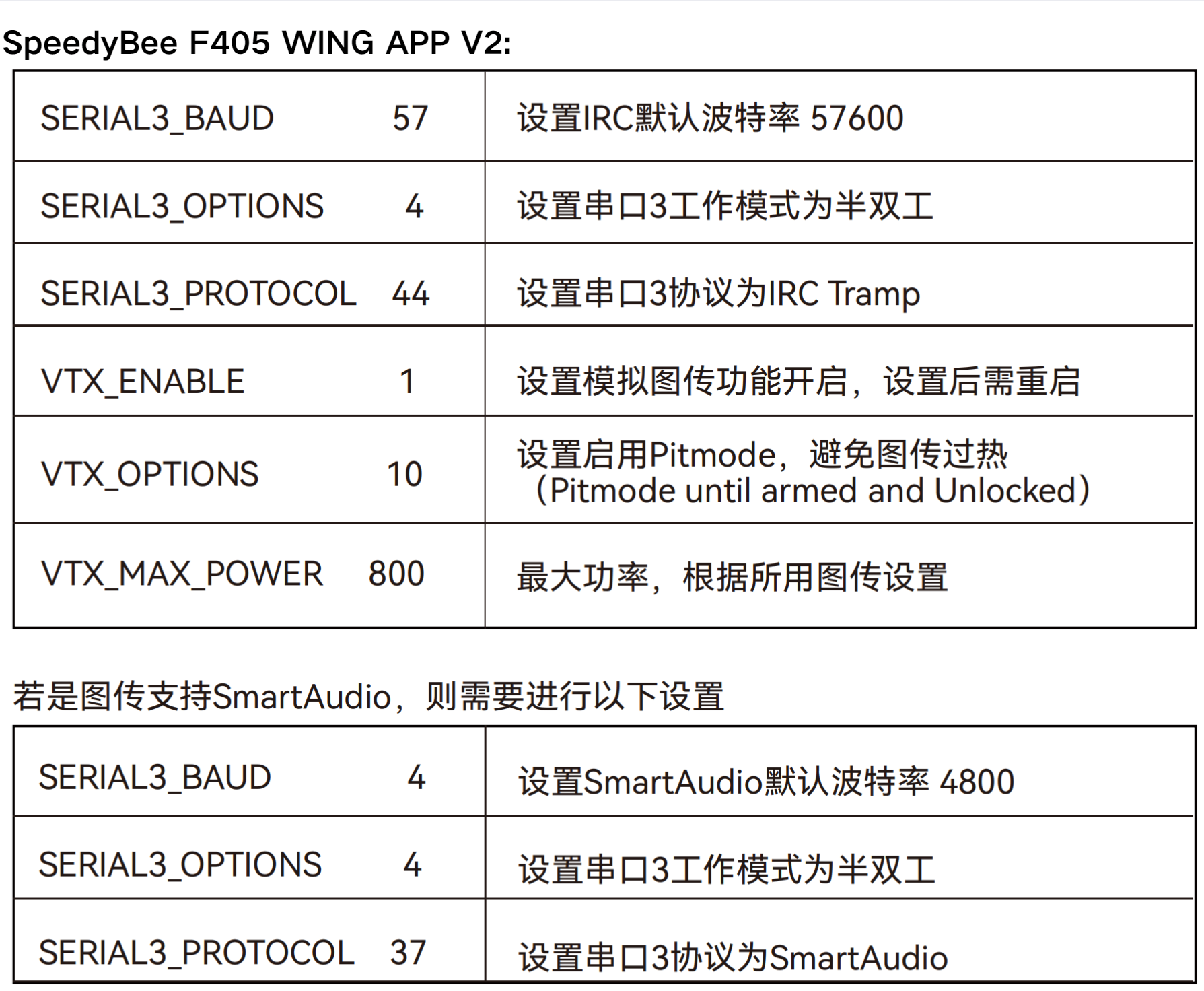
模拟图传参数设置: https://docs.speedybee.cn/plane/ardupilot/settings/vtx/analog-vtx/config.html
- 高清图传安装:

- 高清图传参数设置:
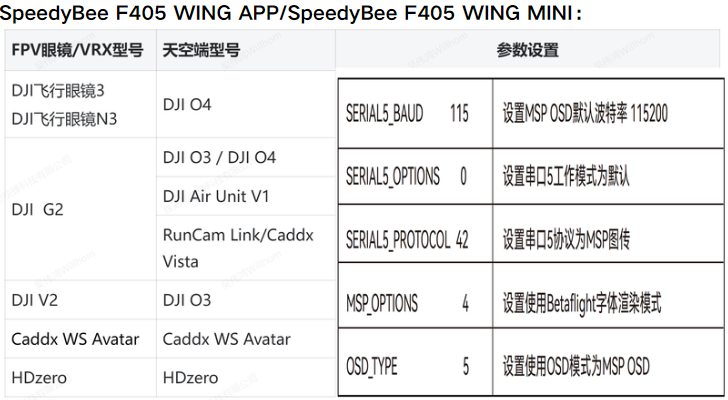
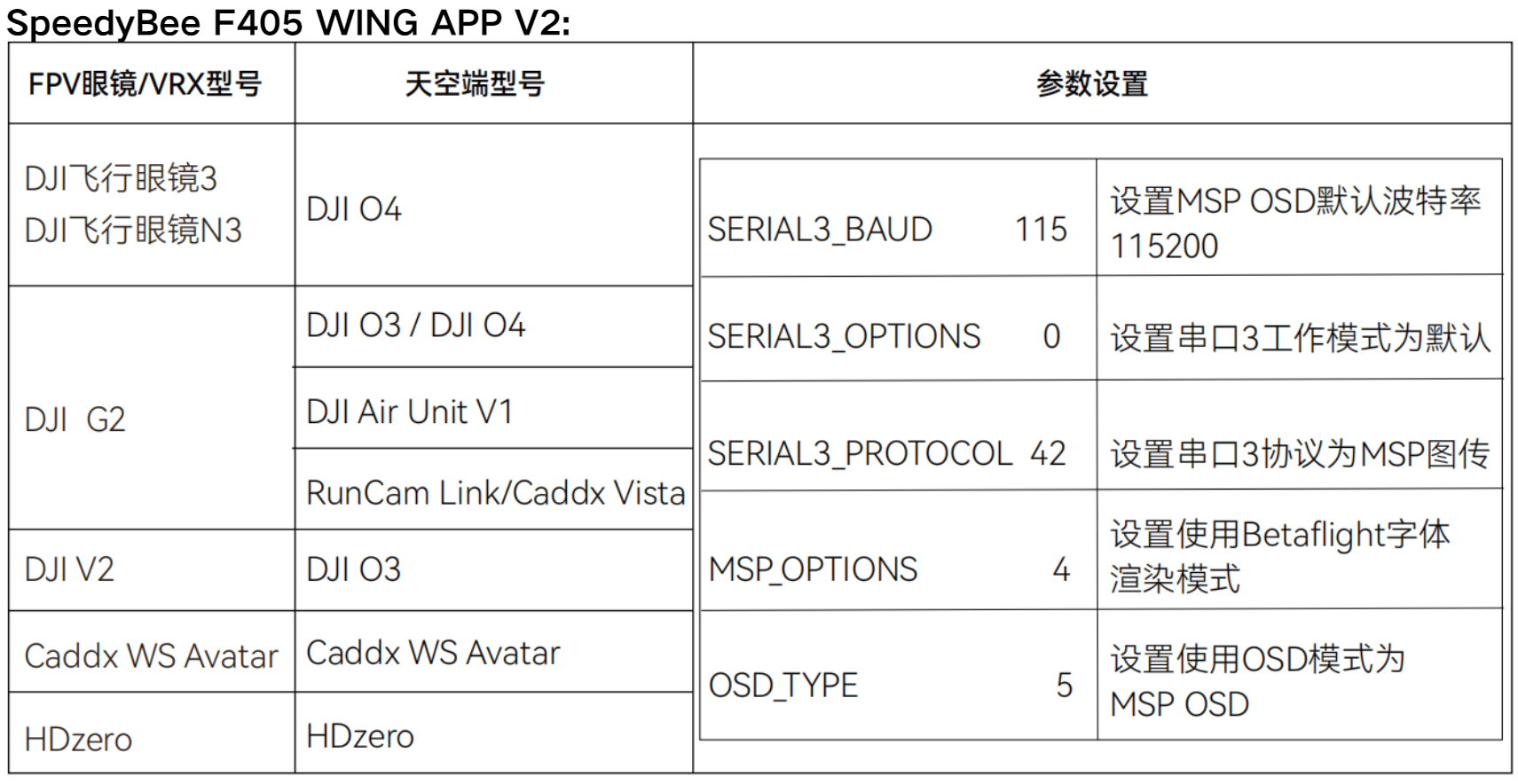
高清图传参数设置: https://docs.speedybee.cn/plane/ardupilot/settings/vtx/hd-vtx/config.html
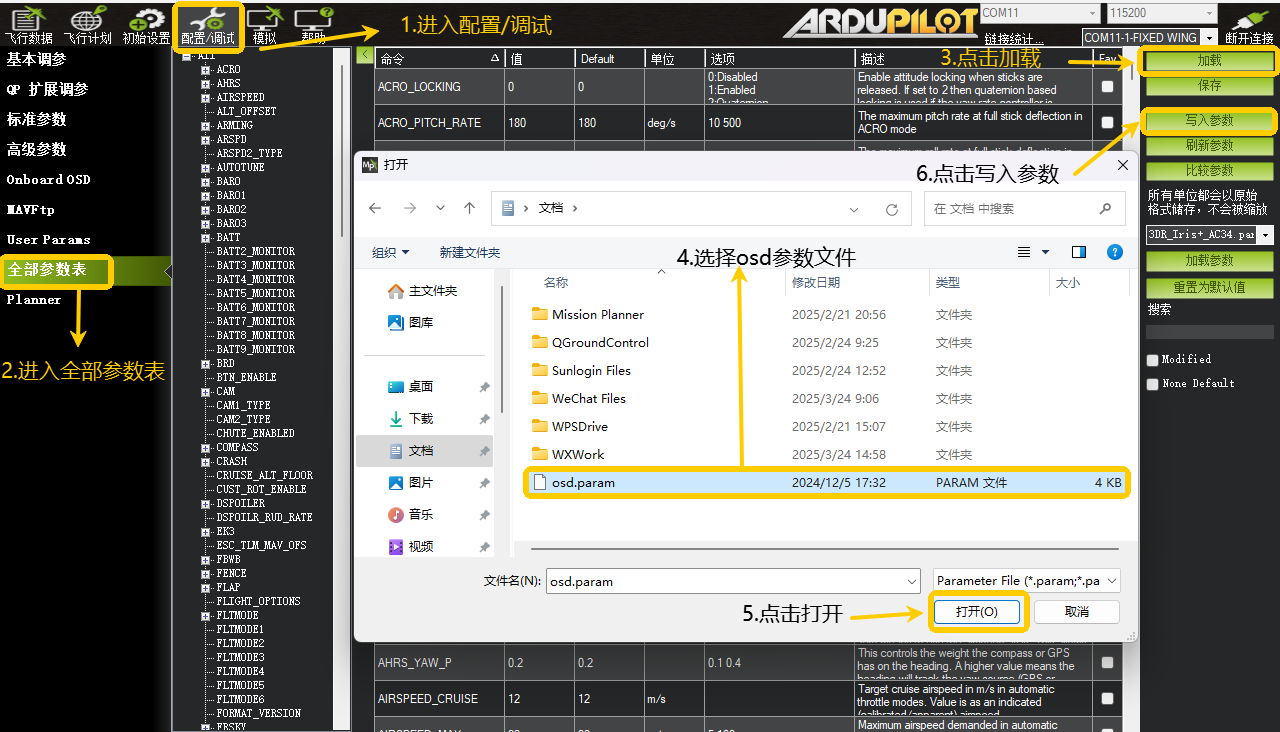
OSD设置:
- OSD配置文件:osd.param。
- 进入配置/调试。
- 进入全部参数表。
- 点击加载。
- 选择osd参数文件。
- 点击打开。
- 点击写入参数。
- OSD显示效果如下:

如何设置OSD元素: https://docs.speedybee.cn/plane/ardupilot/settings/fc/osd.html
4.3.5 空速计安装与设置
空速计安装位置参考:

空速计安装、参数设置及如何校准: https://docs.speedybee.cn/plane/ardupilot/settings/airspeed/airspeed-setup.html
五、飞行前调试
5.1 垂起参数设置
以下参数 基准为4.5.7固件,不同版本的固件,参数会有所不同。
倾转相关参数:
| 参数 | 值 | 说明 |
|---|---|---|
| Q_TILT_YAW_ANGLE | 10 | 多轴用的矢量角度,10=10度,多轴模式下打方向舵倾转电机转动的最大角度 ,一般来说装桨不刮到机身就行 |
| Q_TILT_FIX_ANGLE | 10 | 固定翼模式用的矢量角度,10=10度,打开后打副翼和升降都会有倾转舵机参与矢量控制 |
| Q_TILT_FIX_GAIN | 0.6 | (固定翼矢量感度,0=关闭,0.6=60%,1=100%) |
| Q_TILT_MAX | 70 | (倾转舵机到这个角度等待空速达到=70度) |
| Q_TILT_RATE_DN | 25 | (多轴变固定翼倾转舵机向下倾转的 角速度 每秒25度) |
| Q_TILT_RATE_UP | 80 | (固定翼变多轴倾转舵机向上倾转的 角速度 每秒80度) |
转换相关参数:
| 参数 | 值 | 说明 |
|---|---|---|
| Q_ASSIST_ANGLE | 65 | 大于这个角度将启动多轴辅助 (属于抗失速保护的一种 飞机角度过大就会自己切成多轴) |
| Q_ASSIST_SPEED | 9-10 | 低于这个速度将启动多轴辅助(设置最小空速+1 T-1一般设置10就行 属于抗失速保护的一种 飞机速度过低就会自己切成多轴) |
| Q_TRANSITION_MS | 2000 | 转换为飞机模式后多轴辅助的时间1k=1秒 或飞机切回多轴的等待最大减速时间 |
| Q_TRAN_PIT_MAX | 5 | 转换时运行允许的水平晃动角度 单位度(设置的越小 切倾转就越稳 但是对倾转舵机和电机要求高) |
| Q_TRANS_DECEL | 3 | 单位 M/s减速率,防止飞机切回多轴速度过高,过高的飞机速度切换到多轴定点模式会让飞机解体 |
多轴相关参数:
根据飞机的实际情况进行修改:
| 参数 | 值 | 说明 |
|---|---|---|
| Q_PILOT_ACCEL_Z | 2.5 | 垂直加速度 默认2.5 m/s 小飞机尽量低一些 |
| Q_PILOT_SPD_DN | 0 | 向下飞行时的最大垂直速度,单位为m/s。如果设置为 0,则使用 Q_PILOT_SPD_UP 值。 |
| Q_PILOT_SPD_UP | 2.5 | 向上飞行时的最大上升垂直速度,单位为m/s。 |
| Q_ANGLE_MAX | 3500 | 多轴模式最大倾角 默认3000=30度 小飞机可以大一点 不然逆风飞不动 |
| Q_LOIT_BRK_DELAY | 1 | 固定翼转倾转后的刹停延迟时间 时间太短会比较吓人 缓冲太长 缓冲距离就长 单位:秒 |
| Q_M_SPIN_MAX | 1 | 多轴最大油门 1=100% 小飞机不费电 可以大一点 |
| Q_M_SPIN_MIN | 0.15 | 多轴时的怠速 0.15=15% |
| Q_VFWD_GAIN | 0.05 | 在多轴QLoiter模式下使用倾转舵机来加速或顶强风 默认0=关闭 打开=0.05 |
| Q_VFWD_ALT | 2 | 小于此高度时禁用倾转助推辅助 小于这个高度是不能切固定翼的 |
| Q_WP_SPEED_DN | 150 | 任务期间最大下降高度速率 单位:CM/S |
| Q_WP_SPEED_UP | 200 | 任务期间最大上升高度速率 单位:CM/S |
| Q_M_SLEW_DN_TIME | 0 | 限制油门减速速度 一般是0 动力过猛的话加一些 |
| Q_M_SLEW_UP_TIME | 0 | 限制油门加速速度 一般是0 动力过猛的话加一些 |
| INITIAL_MODE | 17 | 飞控上电时以QSTABLIZE模式启动 防止上电是固定翼模式 地面打桨 |
| Q_OPTION | 1024 | 在解锁时启用电机倾斜以进行偏航控制,适用飞机会自旋的情况。 |
垂起返航相关参数:
| 参数 | 值 | 说明 |
|---|---|---|
| Q_WP_SPEED_DN | 150 | 一级降落速度 cm/s |
| Q_LAND_FINAL_SPD | 0.5 | 二级降落速度 m/s |
| Q_LAND_FINAL_ALT | 3 | 二级降落高度 单位M |
| Q_RTL_ALT | 100 | 多轴返航高度 单位M(要看当前高度有无遮挡物) |
| Q_RTL_MODE | 2 | 启用混合式返航(=2) |
| RTL_ALTITUDE | -1 | 固定翼返航高度 单位M 如果设置为-1,则保持当前高度返航。如果设置了高度 则会慢慢降高或者爬升至指定高度返航 |
Q_RTL_MODE解释:
Q_RTL_MODE=2 ✅ 推荐使用
含义:飞机将按照 RTL_ALTITUDE 设定的高度飞返返航点,并围绕 Q_FW_LND_APR_RAD 指定的半径(默认为 0,若为 0 则使用 WP_LOITER_RAD,建议设置为 50~60m)进行螺旋下降,
直到下降至 Q_RTL_ALT 的高度,再切换为 QRTL 模式降落。
优点:
- 飞机保持巡航状态返航,减少多旋翼飞行时间;
- 降落前以固定翼模式逐步螺旋下降,避免高空直接切多轴带来的能耗和风漂问题;
Q_RTL_MODE=1 不推荐使用
含义:当飞机进入返航点半径范围(由 RTL_RADIUS 定义)后,无论当前高度是多少,立刻切换至 QRTL 模式,以多旋翼方式悬停并降落。
⚠ 风险提示:
- 存在安全隐患:若返航时飞机高度较高(如 100m+),直接切换为 QRTL 会导致飞机在高空停止前飞、开启垂直降落,极易受到风力影响被吹走,或因电量不足在半空失控。
- 多旋翼降落比固定翼降落更耗电,高空 QRTL 会增加炸机风险。
返航相关参数解释:
飞机返航时将按照参数 RTL_ALTITUDE 所设定的高度返回返航点(Home 点)。抵达返航点后,飞机不会立即切换为 QRTL 模式,而是会围绕以 Q_FW_LND_APR_RAD 参数设定的半以固定翼模式开始盘旋下降。
- 若 Q_FW_LND_APR_RAD 为 0,则将自动使用 WP_LOITER_RAD 的设定值作为盘旋半径;
- 飞机将以该半径持续以固定翼模式盘旋下降,直到下降至 Q_RTL_ALT 指定的高度;
- 达到该高度后,系统将自动切换为 QRTL (多旋翼)模式,执行多旋翼垂直降落。
5.2 电调校准
确保电池已断开,接收机已对频,桨叶已卸除!
①点击飞行数据→点击动作→点击解锁/锁定→点击Force Arm。

②马上将油门推至最高。
③给飞控使用电池供电。
④电调响起提示音→马上将油门推至最低→电调提示音结束。
BLHeli32/BLHeli_S电调校准声:
接上电池等待2秒→“播放一首音乐”为油门最高点确认音→等待音乐播放完毕→将油门推到最低等待1秒→“播放另一首音乐,嘚-嘚-”为油门最低点确认音→校准完毕
PWM电调校准声:
接上电池等待2秒→“哔-哔-”油门最高点确认音→将油门推到最低等待1秒,N声短鸣声表示锂电池节数→“哔-”油门最低点确认音→校准完毕。
⑤轻推油门,电机立马转动,将油门从0%推至20%,查看油门是否线性。
⑥若和上述效果有差异,断开电池,返回第②点重新进行校准。
电调校准及Dshot协议开启: https://docs.speedybee.cn/plane/ardupilot/settings/esc/esc-dshot.html
5.3 电机转向检查
注意测试时请勿装桨!
强制解锁飞机,检查各个电机转向:

轻推油门,电机正确转向为左电机逆时针,右电机顺时针,尾电机逆时针,如下图所示,可轻抚电机感受转向:

若电机转向错误,请交换 任意电机 的三根电机线中 任意两根 ,即可调整转向。
5.3.1 遥控器输出检查
强制解锁→轻推油门至电机刚好转动→电机均转动→ 轻微打杆 给予飞控指令。
电机转速快慢可通过贴胶带或美纹纸感受转速。
- 推俯仰杆,尾电机转速增加;
- 拉俯仰杆,左前右前电机转速增加;
- 打左横滚,右前电机转速增加;
- 打右横滚,左前电机转速增加;
若反馈不一致,请检查 SERVO OUTPUT和排针接线。
5.3.2 电机自稳反馈检查
强制解锁→轻推油门至电机刚好转动→电机均转动→给予飞机一定 姿态变化。
电机转速快慢可通过贴胶带或美纹纸感受转速。
- 当飞机抬头时,尾电机转速增加;
- 当飞机低头时,左前右前电机转速增加;
- 当飞机左滚时,左前电机转速增加;
- 当飞机右滚时,右前电机转速增加;
若电机反馈与上述不一致,请 SERVO OUTPUT和排针接线。
5.3.3 桨叶安装
- 根据电机转向选择正桨或是反桨。
- 桨叶安装时注意有字的一面朝上。

5.4 罗盘校准
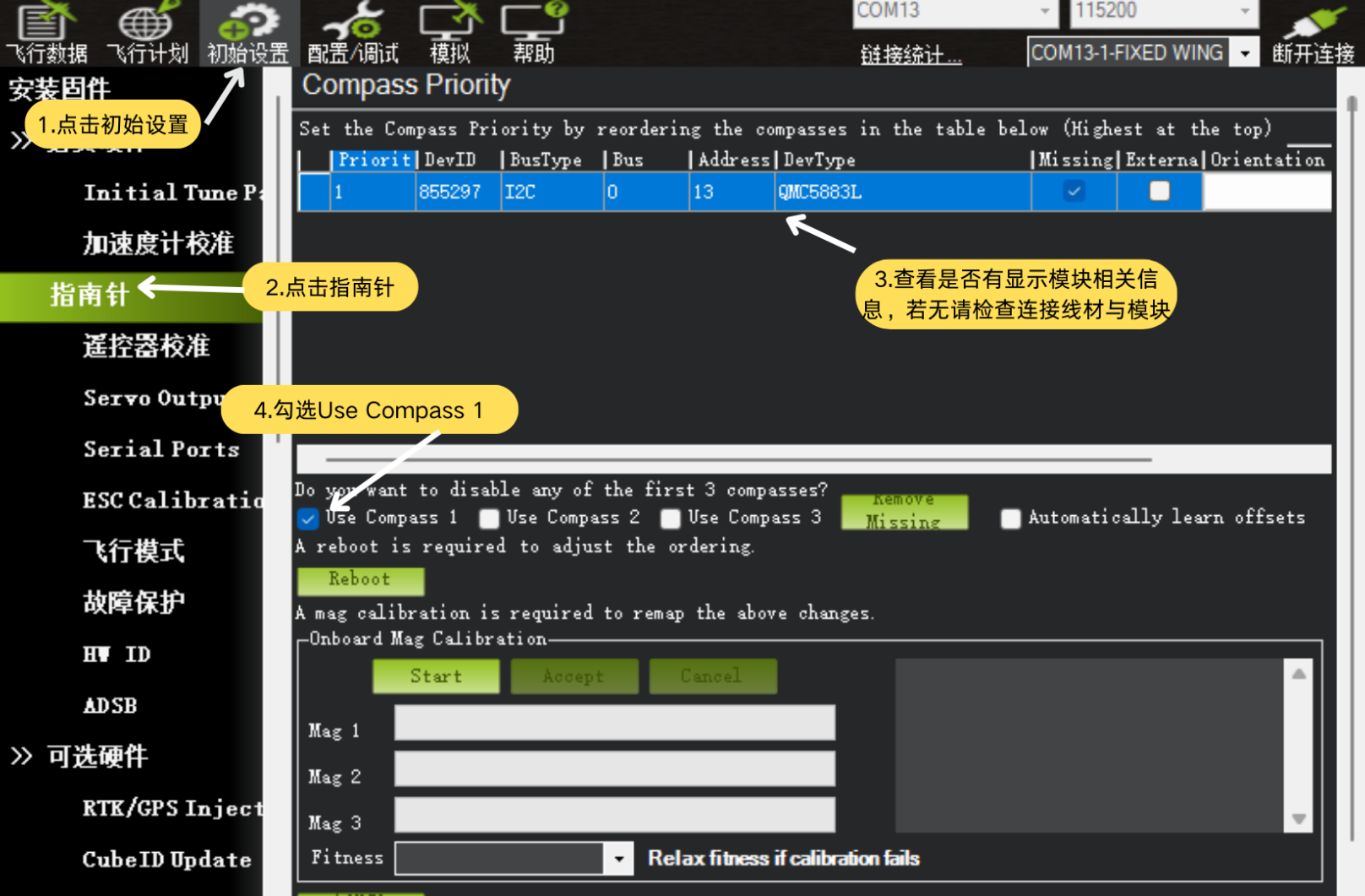
- 进入初始设置。
- 点击指南针。
- 查看是否有显示模块相关信息,若无请检查连接线材和模块。
- 勾选Use Compass 1。
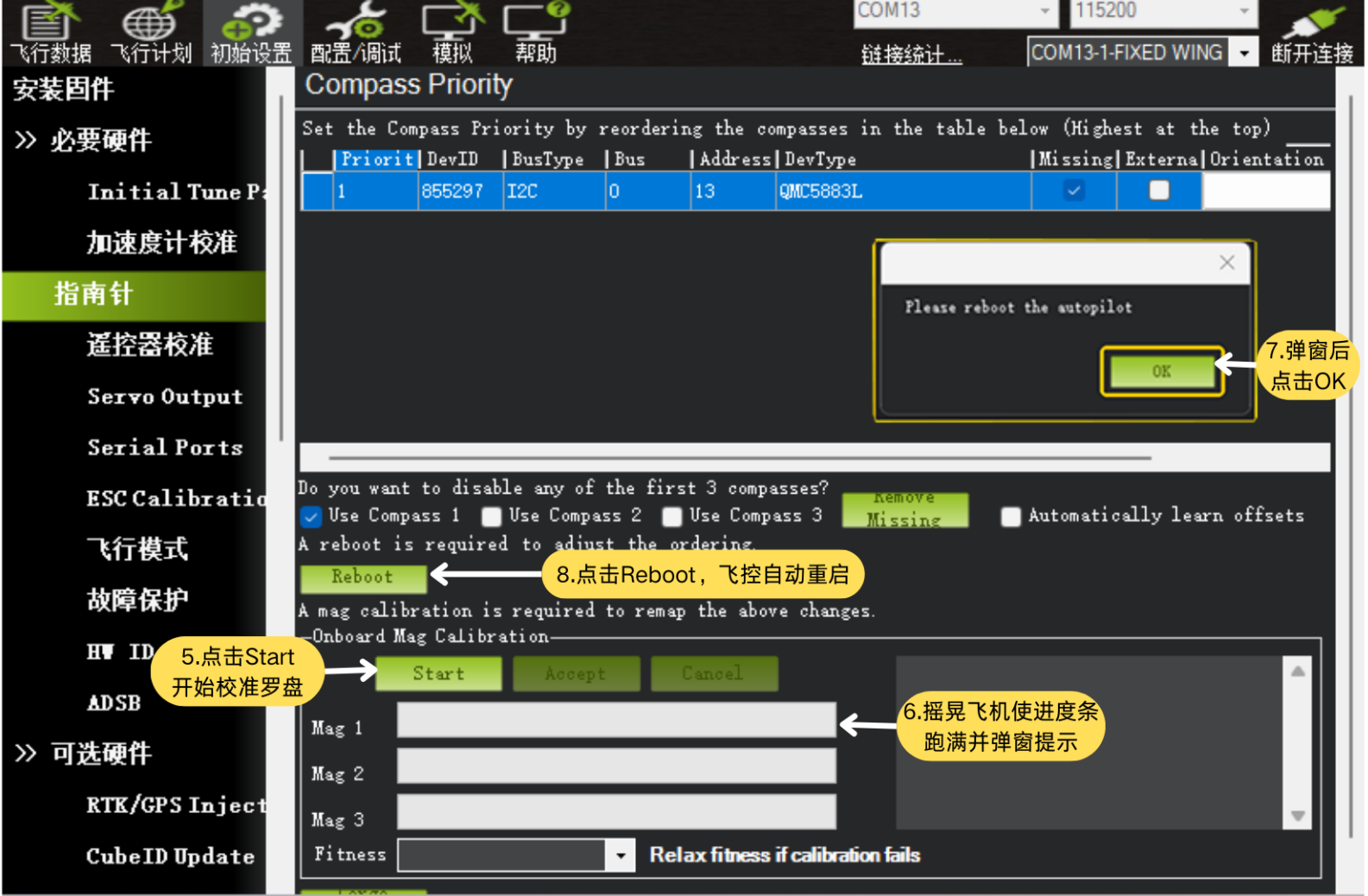
- 点击Start,开始校准罗盘。
- 摇晃飞机使进度条跑满。
- 弹窗后点击OK。
- 点击Reboot,飞控自动重启。
校准时远离金属物体,如汽车、电动车、高压电塔;
在室外 GPS 信号良好(至少 8 颗星)时校准;
校准时尽量使用无线调参,避免 USB 线干扰;
如更换 GPS/罗盘模块,或调整飞控安装位置,必须重新校准。
罗盘校准: https://docs.speedybee.cn/plane/ardupilot/settings/gps/ap-compass-setup.html
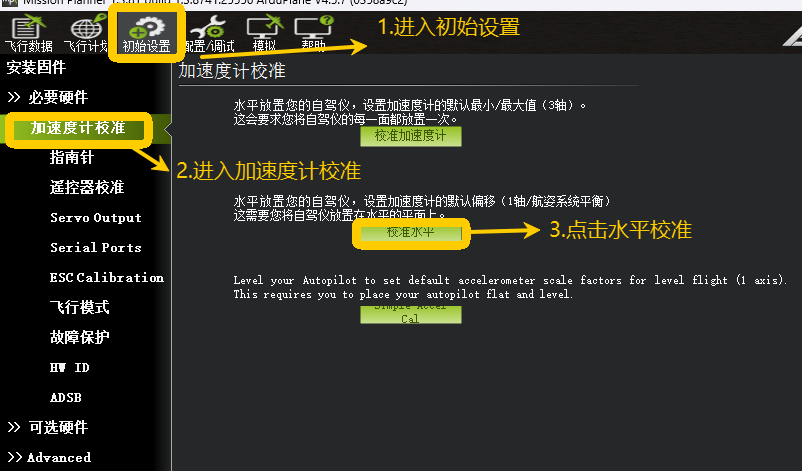
5.5 水平校准
在飞控安装完成后需要进行一次水平姿态校准,对陀螺仪的安装倾角进行补偿, 以确定正确的平飞姿态!
- 将飞机平放在平整地面进行水平校准。

5.6 失控保护参数设置
如何设置失控保护参数: https://docs.speedybee.cn/plane/ardupilot/settings/fc/failsafe.html
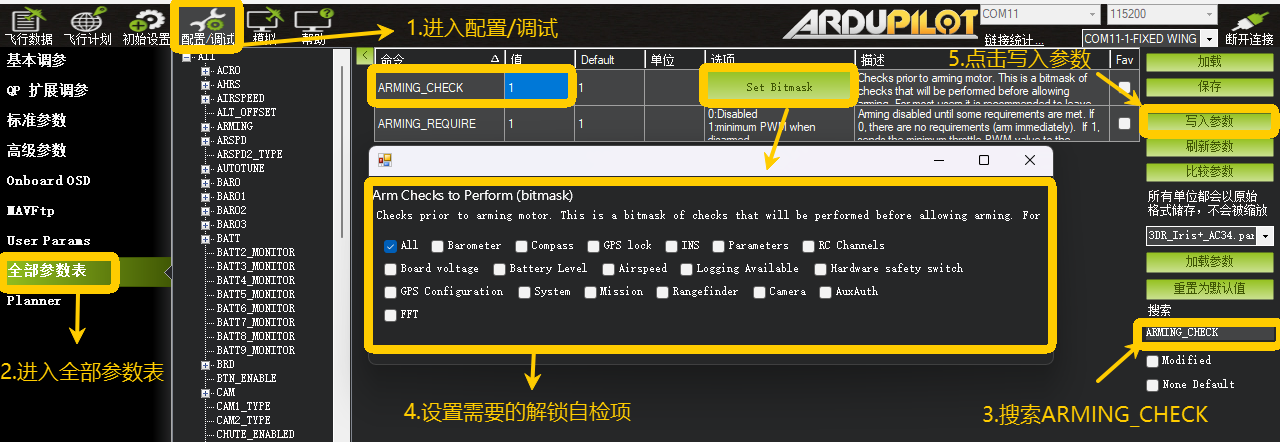
6.1 自检参数设置
1.进入 配置/调试。
2.进入 全部参数表。
3.搜索 ARMING_CHECK。
4.设置需要的 解锁自检项。
6.2 起飞前检查
6.2.1 重心检查
1.参考机身标识:
- 许多飞翼或固定翼机身上会标注推荐重心位置,通常在主翼前缘后 25-30% 处。

2.手指支撑法:
- 将飞机用 两根手指 放在主翼下方的推荐重心点上,轻轻平衡机身。
- 如果 机头过重 或 机尾过重,需要调整电池或配重。
机头偏重(重心过前):
- 飞机在飞行时不易拉升,可能导致炸机。
- 可尝试 将电池后移 或 减少机头配重。
机尾偏重(重心过后):
- 飞机容易 抬头失速。
- 解决方法: 将电池前移 或 增加机头配重。
6.2.2 起飞前舵面检查
飞行模式切换至 ACRO
当向左打副翼杆时,反馈为左机翼舵面朝上,右机翼舵面朝下。
当向右打副翼杆时,反馈为左机翼舵面朝下,右机翼舵面朝上。
当向上打升降杆时,反馈为两个V尾舵面同时朝下。
当向下打升降杆时,反馈为两个V尾舵面同时朝上。
当向左打方向杆时,反馈为两个V尾舵面同时朝左。
当向右打方向杆时,反馈为两个V尾舵面同时朝右。
飞行模式切换至 FBWA
当飞机左滚时,左机翼舵面朝下,右机翼舵面朝上。
当飞机右滚时,左机翼舵面朝上,右机翼舵面朝下。
当飞机抬头时,反馈为两个V尾舵面同时朝下。
当飞机低头时,反馈为两个V尾舵面同时朝上。
自稳状态下,若遥控操作的方向舵正确,则自稳的方向舵反馈一定正确。若自稳反馈不正确请检查遥控操作的方向舵反馈 。
6.2.3 卫星数检查
在室外,检查卫星数是否大于8颗,大于8颗才可以起飞!
若卫星数一直小于8颗,请到空旷场地,若无改善请更换GPS模块。

6.2.4 风向确认
观察风向:
- 可观察 烟雾、风标 等风向标志。
- 使用 轻质物体(如草叶)抛向空中,观察飘动方向。
确定逆风起飞方向:
- 逆风起飞可提供更大的升力,降低起飞速度要求。
- 顺风起飞可能导致失速或被风压住机头,容易导致炸机。
6.3 飞行测试
6.3.1 垂起飞行测试
- 将三段飞行模式设置为 QSTABILIZE,QHOVER,QLOITER
注意:多旋翼的操控方式,建议测试时目视飞行
测试流程:QSTABILIZE 模式起飞→测试操作反馈是否正确→切换至 QHOVER →油门中位进行悬停一到两分钟→油门自动学习→ QHOVER 降落→断电重启飞控→ QSTABILIZE 模式起飞→油门控制在中位可悬停→切换至 QLOITER →测试定高定点悬停→ QLOITER 模式降落 。
- 以 QSTABILIZE 模式 小油门 起飞,测试打杆反馈,若操作反馈不正确,请重新检查 遥控器校准及通道混控配置,电调及电机检查。
- 若在 QSTABILIZE 模式下飞行稳定,将飞行模式切换至 QHOVER,控制油门摇杆在50%,飞机定高定点悬停;
- 在 QHOVER 模式下飞控会进行油门自动学习,以 QHOVER 模式降落,断开所有供电重启飞控。更换电池后再次起飞,切换回 QSTABILIZE 模式,控制油门在50%,也可实现悬停效果;
- 切换至 QLOITER,控制油门在50%,测试定高定点悬停效果,飞机开始悬停后,位置和高度变化幅度应在1米的半径圈内或者更小。
当Q_stabilize模式下,飞行手感不好时,可以通过Q_AUTOTUNE模式进行多轴的自动调参。
操作参考: https://ardupilot.org/plane/docs/qautotune-mode.html
调参过程说明: https://ardupilot.org/plane/docs/quadplane-vtol-tuning-process.html#quadplane-vtol-tuning-process
6.3.2 固定翼飞行测试
将三段飞行模式设置为 ACRO,STABILIZE,AUTOTUNE
注意:固定翼的操控方式,建议FPV视角飞行
测试流程:ACRO 模式起飞→切换至 STABILIZE 测试飞机是否能够相对稳定飞行→切换至 AUTOTUNE →自动调参完毕→切换至 STABILIZE →感受飞机手感→降落上锁→断电重启飞控。
- 以 ACRO 模式起飞,飞控会自动抗风,防止飞机因风侧翻,且保证飞机有足够的舵量。
- 随后切换至 STABILIZE 模式,不操作遥控,查看飞机是否能够平飞一段时间,若飞机 俯冲或爬升,则需要重新校准水平,令飞控贴合飞机攻角。
建议进行 Servo Autotrim(舵机自动配平),提升平飞体验: https://docs.speedybee.cn/plane/ardupilot/settings/fc/servo-autotrim.html
- 若无问题,切换至 AUTOTUNE 进行自动调参。
- 若在 STABILIZE 模式下飞机姿态大幅度变化,请进行倾转舵机检查、舵面检查( STABILIZE 模式)、水平校准检查。
- 自动调参完毕后,切换回 STABILIZE 模式,感受飞行手感,随后降落。
自动调参: https://docs.speedybee.cn/plane/ardupilot/settings/fc/autotune.html
6.3.3 过渡飞行测试
将三段飞行模式设置为 QSTABILIZE,QLOITER,FBWA
注意:
1.请确认垂起与固定翼的单独测试已无问题;
2.进行固定翼切换前,请在垂起模式将飞机飞至20米以上的高度,再进行过渡切换,飞行时 注意切换操作方式, 切换过程中 注意油门需要保持在中位。
测试流程:QSTABILIZE/QLOITER 模式垂直起飞→飞机到达高度→切换至 FBWA →飞机切换为固定翼模式(感受切换后的飞行)→切换至 QSTABILIZE/QLOITER 模式→飞机切换为垂起模式(感受切换后的飞行)→降落。
- 以 QLOITER 起飞,飞行至足够高度后,切换至 FBWA,此时倾转舵机倾转直至电机完全水平,飞机完成从垂起模式切换至固定翼模式,开始向前飞行,注意控制高度,感受切换后的飞行是否顺畅有无异常。
- 已安装空速计:倾转舵机将倾转至一定角度等待空速到达,随后电机完全水平,切换至固定翼模式。
- 无安装空速计:倾转舵机将在2-3s内切换至水平状态,飞机切换至固定翼模式后会进行小幅度的俯冲,以增加空速,提升机翼的升力,防止飞机失速。
- 将飞行模式由 FBWA 切换回 QLOITER,此时倾转电机快速从水平状态切换至垂直状态,切换过程中飞机可能会有小段滑行,切换回垂起模式后,感受切换后的飞行是否顺畅有无异常,随后降落。
若在转换至固定翼的过程中,飞机姿态出现大幅度变化,请切换回 QSTABILIZE 模式,倾转舵机将快速变为垂直状态,立刻降落。根据上述测试内容进行倾转舵机检查、舵面检查( STABILIZE 模式)、水平校准检查。
技术支持二维码
